S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Practice For Group Work Week 2 Case 2.1 - Assigning Plants To Products (Better Products Company)Document2 paginiPractice For Group Work Week 2 Case 2.1 - Assigning Plants To Products (Better Products Company)Thu TrangÎncă nu există evaluări
- Quantitative School of ManagementDocument3 paginiQuantitative School of ManagementVAIBHAV JAIN100% (1)
- PCS-9613S X DataSheet en Overseas General X R1.10Document57 paginiPCS-9613S X DataSheet en Overseas General X R1.10parveen115Încă nu există evaluări
- 4 - A Modelling Approach For Prediction of Erosion Behaviour of Glass Fiber Polyster Composites Amar Patnail - Alok Satapathy - Mahapatra S SDocument14 pagini4 - A Modelling Approach For Prediction of Erosion Behaviour of Glass Fiber Polyster Composites Amar Patnail - Alok Satapathy - Mahapatra S Sgirish KulkarniÎncă nu există evaluări
- 3 - A Grey Based Taguchi Approach For Characterization of Erosive Wear Phenomenon of Glass Polyster Fly Ash Filled CompositesDocument11 pagini3 - A Grey Based Taguchi Approach For Characterization of Erosive Wear Phenomenon of Glass Polyster Fly Ash Filled Compositesgirish KulkarniÎncă nu există evaluări
- 2 - A Coupled Finite Element and Mesh Free Analysis of Erosive Weae - Wang - YangDocument5 pagini2 - A Coupled Finite Element and Mesh Free Analysis of Erosive Weae - Wang - Yanggirish KulkarniÎncă nu există evaluări
- 1 - A Comparative Study On Erosion Characterstics of Red Mud Filled Bambo-Epoxy and Glass-Epoxy Composites - Biswas - SatapathyDocument16 pagini1 - A Comparative Study On Erosion Characterstics of Red Mud Filled Bambo-Epoxy and Glass-Epoxy Composites - Biswas - Satapathygirish KulkarniÎncă nu există evaluări
- Syllabus-5+to+6+Semester Mech 2021Document98 paginiSyllabus-5+to+6+Semester Mech 2021girish KulkarniÎncă nu există evaluări
- Calibration Tools ListDocument5 paginiCalibration Tools ListdianÎncă nu există evaluări
- CulvertsDocument14 paginiCulvertsMatsobane LekalaksÎncă nu există evaluări
- CSC-160 Series Numerical Line Protection EquipmentDocument112 paginiCSC-160 Series Numerical Line Protection EquipmentMarkusKunÎncă nu există evaluări
- 5 Đề Thi Giữa Học Kì 2 Môn Tiếng Anh 10 Ilearn Smart World Năm Học 2022-2023 (Có File Nghe)Document48 pagini5 Đề Thi Giữa Học Kì 2 Môn Tiếng Anh 10 Ilearn Smart World Năm Học 2022-2023 (Có File Nghe)Dạy Kèm Quy Nhơn OfficialÎncă nu există evaluări
- Presentation by SHIVAM SHAHDocument23 paginiPresentation by SHIVAM SHAHmikojiÎncă nu există evaluări
- VedicReport7 25 20213 48 52PMDocument55 paginiVedicReport7 25 20213 48 52PMAbhishek BiswalÎncă nu există evaluări
- Lesson - 03 - Focus On Plastic FootprintsDocument59 paginiLesson - 03 - Focus On Plastic FootprintsMariaÎncă nu există evaluări
- GE 4 MMW in A NutshellDocument7 paginiGE 4 MMW in A NutshellPEACH CATHERINE MANOTAÎncă nu există evaluări
- Research ProposalDocument2 paginiResearch ProposalAnika AroviÎncă nu există evaluări
- DIRECTION: Read Each Question Carefully. Encircle The Letter That Corresponds To The Letter of Your AnswerDocument2 paginiDIRECTION: Read Each Question Carefully. Encircle The Letter That Corresponds To The Letter of Your AnswerMea-Ann OscianasÎncă nu există evaluări
- Simulation LAB (CAE) M.Tech I-I Sem Mechanical Engineering Machine DesignDocument24 paginiSimulation LAB (CAE) M.Tech I-I Sem Mechanical Engineering Machine Designjeevan scplÎncă nu există evaluări
- 2347-Article Text-7179-1-10-20220922Document12 pagini2347-Article Text-7179-1-10-20220922george weafriÎncă nu există evaluări
- Effect of Childhood Adversity On Brain Dopamine Function in Adulthood !Document2 paginiEffect of Childhood Adversity On Brain Dopamine Function in Adulthood !Aaron AdamsÎncă nu există evaluări
- Rd6appspecDocument2 paginiRd6appspecravi00098Încă nu există evaluări
- FNCPDocument3 paginiFNCPDarcey NicholeÎncă nu există evaluări
- What Is Emergency Lighting Circuit DiagramDocument14 paginiWhat Is Emergency Lighting Circuit DiagramjackÎncă nu există evaluări
- DCS - VI Sem SchemeDocument2 paginiDCS - VI Sem SchemePriya UpadhyayÎncă nu există evaluări
- Foundations For Low Loss GRIN Fiber CouplingDocument16 paginiFoundations For Low Loss GRIN Fiber CouplingpsylabsÎncă nu există evaluări
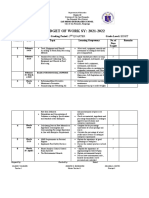
- BUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3Document2 paginiBUDGET OF WORK SY: 2021-2022: Subject: Tle 8 Grading Period: 3michelle dayritÎncă nu există evaluări
- Thousand Suns Starships - Chapter 3 Cheat SheetDocument16 paginiThousand Suns Starships - Chapter 3 Cheat SheetRogue GamesÎncă nu există evaluări
- A Peer Reviewed Research Journal On Language, Literature & Culture'sDocument8 paginiA Peer Reviewed Research Journal On Language, Literature & Culture'sTRISANGAM INTERNATIONAL REFEREED JOURNAL (TIRJ) EDITOR - MR. PRASENJIT ROYÎncă nu există evaluări
- RA-080202 - PROFESSIONAL TEACHER - Secondary (Mathematics) - KORONADAL CITY - 10-2022Document39 paginiRA-080202 - PROFESSIONAL TEACHER - Secondary (Mathematics) - KORONADAL CITY - 10-2022Fretzie CambiadoÎncă nu există evaluări
- Baylan: Water Meters With M-BusDocument2 paginiBaylan: Water Meters With M-Busamr ibrahimÎncă nu există evaluări
- English Solved SP3Document6 paginiEnglish Solved SP3Prem PatelÎncă nu există evaluări
- Reducing Streetism: A Neglected Cause of Social Anxiety and Delinquency in Adama CityDocument25 paginiReducing Streetism: A Neglected Cause of Social Anxiety and Delinquency in Adama CityKorie ArsieÎncă nu există evaluări
- StringDocument4 paginiStringAadyant BhadauriaÎncă nu există evaluări
- A Settlement Prediction Model Considering Tidal Loading and Traffic LoadingDocument14 paginiA Settlement Prediction Model Considering Tidal Loading and Traffic LoadingSandro GuedesÎncă nu există evaluări