Documente Academic
Documente Profesional
Documente Cultură
Incon: User Manual
Încărcat de
SoeAyeTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Incon: User Manual
Încărcat de
SoeAyeDrepturi de autor:
Formate disponibile
Speed governor – 12/24 valves output
Manual or automatic temperature compensation
INCON
Integrated Speed and Injection Controller
SW version 3.1, May 2006
User manual
ComAp, spol. s r.o.
Copyright © 2005 ComAp s.r.o. Světova 7, 180 00 Praha 8, Czech Republic
Written by Aleš Procházka Tel: +420 2 66316661, Fax: +420 2 66316647
Prague, Czech Republic E-mail: info@comap.cz, www.comap.cz
1. Table of Contents
1. Table of Contents.......................................................................................................................................2
2. Introduction ................................................................................................................................................4
Warnings !! .....................................................................................................................................................4
General information........................................................................................................................................4
Application .................................................................................................................................................4
Description of operation.............................................................................................................................4
3. Installation..................................................................................................................................................6
INCON-2 Unit .................................................................................................................................................6
Dimensions and mounting holes position ..................................................................................................6
Recommended wiring ................................................................................................................................7
Connector pin description ..........................................................................................................................9
Jumpers and LED’s location ....................................................................................................................10
Pickups.........................................................................................................................................................11
RPM pickup..............................................................................................................................................11
Camshaft (CAM) pickup...........................................................................................................................11
Crankshaft (TDC) pickup (Top Dead Center pickup)...............................................................................12
Pickups jumper configuration...................................................................................................................12
Gas Admission Valves GAV.........................................................................................................................12
Firing order...............................................................................................................................................12
GAV current diagnostics ..........................................................................................................................13
4. Inputs and outputs ...................................................................................................................................15
Binary inputs.................................................................................................................................................15
RUN – K5:9..............................................................................................................................................15
RATED – K5:3 .........................................................................................................................................15
DROOP – K5:10 ......................................................................................................................................15
SPEED UP – K5:8 ...................................................................................................................................15
SPEED DOWN – K5:4.............................................................................................................................15
Binary outputs ..............................................................................................................................................16
WARNING – K5:6 ....................................................................................................................................16
INCON FAIL – K5:7 .................................................................................................................................16
Analog input .................................................................................................................................................16
Dose request – K5:1 ................................................................................................................................16
5. Setpoints ..................................................................................................................................................17
BASIC SET - B ..........................................................................................................................................17
Idle RPM [ RPM ] ............................................................................................................................17
Rated RPM [ RPM ] ........................................................................................................................17
Overspeed RPM [ RPM ] ....................................................................................................................17
Idle Ramp Time [ RPM/s ] ..................................................................................................................17
Speed Ramp Time [ s ]........................................................................................................................17
Gear Teeth [ - ]................................................................................................................................18
Cylinders Number [ - ] ......................................................................................................................18
Ext Fuel Control [ 0 / 1 ]......................................................................................................................18
Valve Test [ 0 / 1 ] .............................................................................................................................18
START - S ..................................................................................................................................................18
Init Start Dose [ 0.1° ] .........................................................................................................................18
Max Start Dose [ 0.1° ] .......................................................................................................................18
Fuel Ramp Time [ s ] ..........................................................................................................................18
Start Ramp Time [ s ]..........................................................................................................................19
Start RPM [ RPM ] ............................................................................................................................19
PID SET - P................................................................................................................................................19
Gain [ % ].........................................................................................................................................19
Integration [ % ] .................................................................................................................................19
Derivation [ % ] .................................................................................................................................19
Maximum Dose [ 0.1°] ........................................................................................................................20
MaxStartUp dose [ 0.1°] .....................................................................................................................20
Droop [ % ] .....................................................................................................................................20
INCON - 3.1, ©ComAp – May 2006 2
INCON-3.1r1.pdf
No Load Dose [ ° ] ..............................................................................................................................20
Full Load Dose [ ° ] .............................................................................................................................20
VALVE CONFIG - V ..................................................................................................................................21
Out A FirOrder [ - ]..............................................................................................................................21
Out B FirOrder [ - ]..............................................................................................................................21
Out L FirOrder [ - ] ..............................................................................................................................21
Injection Start [ 0.1°] ...........................................................................................................................21
VALVE CONTROL - R ..............................................................................................................................22
Opening Delay [ 0.1ms ] .....................................................................................................................22
Peak Current [ 0.1% ].........................................................................................................................22
Holding Current [ 0.1% ] .....................................................................................................................22
Scope setting [ Std, RPM, A to L ]......................................................................................................22
TEMPER COMP - C...................................................................................................................................23
Cyl 1 Corr Low [ 0.1° ] ........................................................................................................................23
Cyl 1 Corr High [ 0.1° ] .......................................................................................................................23
Cyl2 Corr Low, Cyl2 Corr High [ 0.1° ]..................................................................................................24
Cyl12 Corr Low, Cyl12 Corr High [ 0.1° ] .............................................................................................24
Automatic Corr [ 0 / 1 / 2] ...................................................................................................................24
Contr Addr [ 34 – 122 ] ...................................................................................................................24
Corr Period [ s ] ...............................................................................................................................24
Corr Gain [ 0.1°]...............................................................................................................................25
Corr Limit [ 0.1°]...............................................................................................................................25
List of possible warnings and shutdowns.....................................................................................................25
6. User interface – setpoint menu................................................................................................................26
WinScope and WinScopeQ..........................................................................................................................26
PARAMETERS: .......................................................................................................................................26
InconDump-1.1.............................................................................................................................................28
Operational menu.........................................................................................................................................29
7. Technical data..........................................................................................................................................30
Power supply................................................................................................................................................30
Operating conditions ....................................................................................................................................30
Dimensions and weight ................................................................................................................................30
Binary inputs and outputs.............................................................................................................................30
Binary inputs ............................................................................................................................................30
Contact relay outputs...............................................................................................................................30
RPM pickup input .........................................................................................................................................30
TDC pickup input..........................................................................................................................................30
Camshaft pickup input..................................................................................................................................31
INCON - 3.1, ©ComAp – May 2006 3
INCON-3.1r1.pdf
2. Introduction
The major intent of this manual is to provide the end user with the necessary information for proper
installation, operating and maintenance of the INCON gas injection unit.
Warnings !!
The data in this manual only describes the product and is not warranty of performance or characteristic.
!!! CAUTION !!!
Dangerous voltage
Never touch any terminals that are in connection with the Gas injectors!
Never touch anything inside the INCON, when the box is opened and power supply is connected!
If you need to perform any modification inside the INCON, always disconnect the power supply
and wait at least 1 minute, before starting carrying out any task.
Always connect grounding terminals!
Adjust set points
All parameters are pre adjusted to their typical values. But the set points in the Setpoint group “Basic
settings” !!must!! be adjusted before the first startup of the engine.
!!! WRONG ADJUSTMENT OF BASIC PARAMETERS
CAN DESTROY THE ENGINE !!!
The following instructions are for qualified personnel only. To avoid personal injury do
not perform any action not specified in this User guide !!!
Note:
ComAp believes that all information provided in this manual is correct and reliable and reserves the right
to update at any time.
ComAp does not assume any responsibility for its use unless otherwise expressly undertaken.
General information
Application
The system has been developed to control the speed and power of a gas engine by varying timing and
duration of opening of gas injection valves for engines of up to 12 cylinders. The INCON-2 includes speed
governor function.
Description of operation
The overall system consists of:
• Unit INCON-2
• Speed pickup
• Camshaft pickup
• Crankshaft top dead center TDC pickup
• Gas Admission Valves on each cylinder
INCON - 3.1, ©ComAp – May 2006 4
INCON-3.1r1.pdf
Gas governor
GEV
INCON Gas
El. mag. valve Exhaust
control system Air
Camshaft
pickup
Magnetic
pickup
Speed
pickup
INCON-2 controls the beginning and duration of gas admission into the suction port (before suction valve).
Varying the GAV opening duration controls engine speed and load. INCON-2 can individually control timing
of each GAV. This is used for equalizing of exhaust gas temperatures of individual cylinders.
The beginning and duration of opening are specified in crankshaft angular rotation degrees (see Engine
timing diagram).
For proper function INCON-2 needs signals from 3 pickups:
• Speed pickup on flywheel – signal is used for measurement of engine speed
• TDC pickup on crankshaft – signal is used as a timestamp for timing of the valves
• Reset pickup on camshaft – signal is used for distinction of the suction stroke of the first cylinder
INCON - 3.1, ©ComAp – May 2006 5
INCON-3.1r1.pdf
3. Installation
INCON-2 Unit
The unit is inside a metal box with a removable cover fixed with four screws to the main housing. There are
eight connectors located on the bottom part of the box.
! Warning !
Connectors must be downward oriented because of protection from dust.
! Warning !
Unit must be mounted on a secure, massive bracket on or near the engine using vibration damping mounts.
Avoid areas of excessive vibration and ambient temperature greater than 70 °C (158 °F).
Dimensions and mounting holes position
INCON - 3.1, ©ComAp – May 2006 6
INCON-3.1r1.pdf
Recommended wiring
INCON
Electronic Fuel Injection
Control Unit
K1 K2 K3 K4 K5 K6
CAN BUS CONTROL
I/O
battery supply
24 VDC
A B C D E F G H I J K L
speed
engine engine pickup
6x electromagnetic valve 6x electromagnetic valve position position
pickup camshaft
pickup
1 1 2 1 1 1 1
6 4 3 6 6
K2
K1 4 3 K3 K4 K5 K6
12 8 6 12 12
INCON - 3.1, ©ComAp – May 2006 7
INCON-3.1r1.pdf
K1
1
F A
12 11 10
2
3
E B
4
9
5
D C
8
6
7
K2
1
4
SUPPLY 24VDC
2
+
3
K3
RPM
1
8
CRANK
7
CAM
6
+24V
+24V
5
K4
CAN L
1
CAN H No termination
6
COM resistor inside !
5
3
4
K5
ANALOG INPUT
4 - 20mA OR
1
0 - 10V
12 11 10
BI COMMON +Bat (-Bat)
3
DROOP RATED
4
RUN SPEED DOWN -Bat (+Bat)
9
SPEED UP BO COMMON
8
SHUTDOWN WARNING
+Bat (-Bat)
7
K6
L G
12 11 10
2
3
K H
4
9
J I
8
6
7
INCON - 3.1, ©ComAp – May 2006 8
INCON-3.1r1.pdf
Connector pin description
Connector K1 – GAS VALVES
PIN Description
1,2 Gas Valve A
3,4 Gas Valve B
5,6 Gas Valve C
7,8 Gas Valve D
9,10 Gas Valve E
11,12 Gas Valve F
Connector K2 – Power Supply
PIN Description
1,4 Power supply 0V
2,3 Power supply 24V
Connector K3 – Pickups
PIN Description
1,8 RPM pickup
2 CAM - Camshaft reset pickup, input
7 CAM - Camshaft reset pickup, 0V
3 TDC pickup, input
6 TDC pickup, 0V
4 +24V supply for active pickups
5 Shielding
Connector K4 – CAN Bus, isolated
PIN Description
1,6 CAN L
2,5 CAN H
3,4 Shielding
Connector K5 – Control signals, all signals isolated
PIN Description
1 Analog input 0-10V/0-20mA – input for requested valve opening if External Fuel Control=1
12 Analog ground
11 Shielding – reserve
2 Common potential for BI
3 BI RATED
4 BI SPEED DOWN
8 BI SPEED UP
9 BI RUN
10 BI DROOP
5 Common potential for BO
6 BO WARNING
7 BO INCON FAIL
Connector K6
PIN Description
1,2 Gas Valve G
3,4 Gas Valve H
5,6 Gas Valve I
7,8 Gas Valve J
9,10 Gas Valve K
11,12 Gas Valve L
INCON - 3.1, ©ComAp – May 2006 9
INCON-3.1r1.pdf
Note:
a) Connector pins are crimped type, by DEUTSCH. The proper DEUTSCH tool for crimping is HDT-48-
00.
b) Usable wire size is AWG14 thru AWG18.
c) It is recommended to use double wires for power supply connection because of connector and wire
current rating. In some cases, the supply current could be up to 15A peak.
Be sure to make good shielding!
• Careful shielding avoids interference problems.
• Connect shielding at one end of wire only (INCON side).
• INCON case must be properly connected to PE line. Connection by case screws is not good enough.
• Pickups must be connected by shielded cables – any disturbance can cause improper INCON
function.
• We recommend connecting the speed analog input by shielded cable.
• We recommend connecting the gas valves by shielded cables.
Jumpers and LED’s location
JP1: EPROM write protect
4 5 6 10 11 12
RUN
1 POWER RS 232 9
CRANK
RPM
CAM
DROOP
RATE
RUN
2 8
OUT1
- OUT2
+
JP8
JP14
JP13
JP4
JP3
3 7
2
JP17
1
K1 K2 K3 K4 K5 K6
1 …. LED indication
JP …. Jumpers marking
INCON - 3.1, ©ComAp – May 2006 10
INCON-3.1r1.pdf
Pickups
Pickups should be mounted at a massive, vibration free position. Constant air gap has to be kept.
RPM pickup
The RPM pickup senses the ring gear teeth or holes on the flywheel.
We recommend min 30 teeth (pulses) per revolution.
Camshaft (CAM) pickup
The camshaft signal detects TDC of cylinder no 1.
Installation of the pin:
Set the flywheel to the position 10 – 25° before TDC of the cylinder no 1, exhaust stroke.
Mark the position of the pin.
Drill the hole and fix the pin.
Active pickup
5 °
°-1
10
0,5 mm
TDC
A
Index "A" - 10°-25° before TDC
(Top Dead Center)
Camshaft
1:2
INCON - 3.1, ©ComAp – May 2006 11
INCON-3.1r1.pdf
Crankshaft (TDC) pickup (Top Dead Center pickup)
Crankshaft pickup senses metallic pins located on the flywheel that provide pulses indicating top dead center
of cylinders. Inductive or active type pickup can be used.
TDC sensor signal quality strongly influences the engine behaviour.
The number of pins and their spacing on the flywheel depends on the number of cylinders and the firing
sequence.
Examples:
For twelve-cylinder Vee engine with 60° between cylinder banks use six pins with angular spacing 60°.
For twelve-cylinder Vee engine with 45° between cylinder banks use six pins with angular spacing in 45°,
75°, 45° … series.
For six-cylinder in-line engine use three pins with angular spacing 120°.
For nine-cylinder in-line engine use nine pins with angular spacing 40°.
Pickups jumper configuration
Pickup Pickup type
RPM Inductive (passive) No jumper settings
CAM NPN JP14 CLOSE
PNP JP14 OPEN
TDC NPN JP13 CLOSE; JP8 “2”
PNP JP13 CLOSE; JP8 OPEN
RPM pickup is always inductive type (passive) – no jumper setting is required.
CAM - camshaft pickup is always active type, preferably NPN type
If you use NPN active pickup, close jumper JP14 (no external resistor is needed).
If you use PNP pickup, open jumper JP14 (no external resistor is needed).
Power supply for active pickups is provided in pickup’s connector.
TDC - Crankshaft pickup: all three types of sensors can be used:
• Active NPN
• Active PNP
• Inductive (passive) – not recommended
If NPN active pickup is used: close jumper JP13, set jumper JP8 to position 2 (no external resistor is
needed).
If PNP pickup is used: close jumper JP13, open jumper JP8 (no external resistor is needed).
If inductive (passive) pickup is used (not recommended): open jumper JP13 and set jumper JP8 to position
1.
Gas Admission Valves GAV
Installation of Gas Admission Valves GAV depends on engine type and on arrangement of filling manifold
and cylinder heads.
GAV may be installed in any orientation.
GAV is being mounted to the cylinder head or air filling manifold using M 8 socket head screws.
The contact surface of the GAV is sealed by means of O-ring located in the groove.
!WARNING!
It is essential that the interior of all gas manifolds be absolutely clean prior to GAV installation and engine
start up. There must not be any dust or contaminations, weld slug, rust, and other solid particles present!
Contamination of GAV by dirt may cause erratic function of the valve!
Firing order
INCON outputs A … to L must be connected to engine cylinders according following table.
A B C D E F G H I J K L
1 2 3 4 5 6 7 8 9 10 11 12
INCON - 3.1, ©ComAp – May 2006 12
INCON-3.1r1.pdf
The gas valves opening order is defined by setpoints Valve control: Out A FirOrder to Out L FirOrder.
GAV current diagnostics
Gas valve current diagnostics is a new feature of INCON firmware version 3-0. It is possible to visualize one
selected channel current on PC WinScope screen - see setpoint Valve control: Scope settings.
Selected INCON channel current is periodically sampled during pulse duration. Data are transmitted to
INCON RS 232 port after pulse sampling is finished and new sample period starts. Not each pulse is
sampled by this method (app. one of 100).
SAMPLING DATA TRANSMITTING SAMPLING
Note: Measured GAV current does not correspond to real solenoid current because of measuring point is
near the ground and parallel resistor is placed to GAV coil.
Setting Valve control: Scope settings = [Std, RPM, A-L] changes the Scope (RS232 diagnostics data)
channels structure:
Std RPM A-L
Channel 1 RPM (actual) RPM (actual) RPM (actual)
Channel 2 RPM (request) TDC (actual) GAV A – L current
Channel 3 Dose CAM (actual) Actual fuel dose
Channel 4 Droop 0 (not used) “A” = selected GAV
Following is an example of WinScope RPM pickup signals record (engine start). The CAM signal is
rectangular due to very low frequency on low RPM.
INCON - 3.1, ©ComAp – May 2006 13
INCON-3.1r1.pdf
Following is an example of WinScope GAV current record.
Current (Channel 2) range: value 1000 corresponds to 5 amps current.
Recommended WinScope X axis scale is 5 sec. It corresponds app 20 ms per one screen.
Hint:
GAV diagnostics activation and deactivation does not change the WinScope channels setting. Standard
channels description setting does not correspond to GAV diagnostics / see table above.
INCON - 3.1, ©ComAp – May 2006 14
INCON-3.1r1.pdf
4. Inputs and outputs
Binary inputs
Hint:
Binary inputs can be connected with common plus or with common minus. Binary inputs are isolated from
power supply.
Inputs switching to Battery + Inputs switching to Battery -
+24V 0V 0V +24V
COM COM
INCON INCON
RUN – K5:9
Input function depends on setting of Basic settings: Ext Fuel Control.
• Ext Fuel Control = 0 … INCON internal speed governor is used.
RUN input must be active (closed) to run the engine. Switching this input to OFF immediately closes all Gas
valves.
• Ext Fuel Control = 1 … external speed governor (e.g. ECON-2S) is used.
Closed RUN input activates automatic temperature corrections when Temperature compensation:
Automatic correction = 1. All INCON valves outputs are inactive (opened) when RUN input is opened.
Hint:
It is recommended to activate automatic temperature compensation in Bi-fuel engine operation only.
RATED – K5:3
If input RATED is active, Requested RPM = Nominal RPM, otherwise Requested RPM = Idle RPM.
DROOP – K5:10
This input switches governor to Droop mode. Status of DROOP input is important also for range of
Requested RPM.
Hint:
Set parameter Droop to 0 or switch input DROOP off for isochronous operation. Droop is active only on
Rated RPM when input DROOP is closed.
SPEED UP – K5:8
If active and SPEED DOWN is not active, the requested speed is increasing.
SPEED DOWN – K5:4
If active and SPEED UP is not active, the requested speed is decreasing.
Hint:
The Requested RPM can be changed in the range ± 8% from Rated RPM by binary inputs SPEED UP and
SPEED DOWN after engine RPM reach Rated speed level only.
If both SPEED UP and SPEED DOWN binary inputs are active, requested speed is not changing its value.
INCON - 3.1, ©ComAp – May 2006 15
INCON-3.1r1.pdf
Binary outputs
Binary outputs are potential free relay outputs. The common potential for outputs is on connector K5, pin 5 =
K5:5
WARNING – K5:6
Output closes, if any internal warning is active. As soon as the internal warning is deactivated, the output
opens.
Possible warnings:
• RPM, CAM, TDC pickup fail: Pickup fail is activated when the difference between any of RPM, TDC and
CAM value is higher than 10 RPM. Pickup fail is not indicated on Binary output K5:6 –warning below 200
RPM. Pickup fail is not indicated by separate RPM, TDC, CAM flag below 50 RPM.
• Over speed: Indication is active when actual RPM is over Basic setting: Overspeed RPM.
• Temperature corrections limit: Indication is active when automatic correction reach Temperature
compensation: Corr limit.
Hint:
From INCON-3.1 is available a new RPM, TDC, CAM pickups diagnostic via INCON RS232 scope channels.
16 bit status word with RPM, TDC and CAM flag is available in “Operational menu – Status” screeen and on
the CAN bus.
INCON FAIL – K5:7
Output closes, if an internal setpoint checksum is wrong after power supply switch on. The INCON program
is blocked and in the Terminal window (on PC) is message: “Wrong parameters”
Analog input
Dose request – K5:1
0-10V or 0-20mA – input for requested valve opening if the setpoint Basic settings: External Fuel Control
=1.
In this case the external governor is used for speed control and INCON works as gas dose actuator -
receiving requested valve opening via analog input K5:1, 12.
Close JP3 jumper for 0-20mA or JP4 jumper for 0-10V analog input range.
INCON - 3.1, ©ComAp – May 2006 16
INCON-3.1r1.pdf
5. Setpoints
BASIC SET -B
Idle RPM [ RPM ]
Engine Idle speed.
Step: 1RPM
Range: 100 – 2000 RPM
Rated RPM [ RPM ]
Engine Rated (nominal) speed.
Step: 1RPM
Range: 100 – 2000 RPM
Overspeed RPM [ RPM ]
If the measured engine RPM is above this limit, all gas valves are immediately closed and remain closed till
RPM < Overspeed RPM. BI WARNING is closed if RPM > Overspeed RPM and opened if RPM <
Overspeed.
Step: 1RPM
Range: 100 – 2000 RPM
Idle Ramp Time [ RPM/s ]
Ramp speed between Idle RPM and Nominal RPM and vice versa.
Step: 1 s
Range: 1 – 999 s
Speed Ramp Time [s]
This setpoint defines reaction speed of SPEED UP and SPEED DOWN inputs. Speed Ramp Time is time
Requested RPM needs to change from (Nominal RPM – 8%) to (Nominal RPM + 8%).
Step: 1 s
Range: 1 – 999 s
Hint:
ReqSpeed can be set from (Nominal RPM – 8%) to (Nominal RPM + 8%) if engine RPM reach the Rated
RPM.
Requested Speed Ramp
Nominal RPM + 8%
Nominal RPM
Nominal RPM - 8%
SpeedRampTime
INCON - 3.1, ©ComAp – May 2006 17
INCON-3.1r1.pdf
Gear Teeth [-]
Number of teeth on engine flywheel that are sensed by RPM pick-up.
Step: 1
Range: 1 – 500
Cylinders Number [-]
Number of engine cylinders.
Step: 1
Range: 1 – 24
Ext Fuel Control [0/1]
If set to 1, external governor is used for speed control. In that case INCON works as actuator, receiving
requested valve opening via analog input.
Range: 0 – internal speed control is used
1 – external speed control is used
Hint:
Ext Fuel Control change can be activated only after the power switch on or after Valve test On/Off.
Valve Test [0/1]
If set to 0 INCON operates in standard mode.
If set to 1 (= TEST) INCON generates constant pulses corresponding to Number of Cylinders without respect
to speed and TDC sensor signal and without corrections.
Range: 0 – standard operation
1 – TEST mode
Hint:
Use Valve Test for INCON hardware and Valves wiring test. Firing order is still fix does not change depends
on Out X FirOrder setpoint.
Valve Test is blocked on running engine !!! Do not start engine during Valve test !!!
START - S
As soon as Measured RPM reaches 10 RPM, INCON opens the gas valves to Init Start Dose. The start dose
can grow up in time form Init Start Dose to Max Start Dose. The start sequence ends as soon as Measured
RPM reaches Start RPM and since this moment begins normal speed regulation. If the Measured RPM
drops below 10 RPM during start, the start sequence starts again from the beginning.
Init Start Dose [ 0.1° ]
Gas valve opening when the engine reaches 10 RPM during start.
Step: 0.1 o
Range: 0 to 180.0 o
Max Start Dose [ 0.1° ]
Max valve opening during engine start. Valve opening rises from Initial Start Dose to Max Start Dose during
cranking.
Step: 0.1 o
Range: 0 to 180.0 o
Fuel Ramp Time [s]
Time from Initial Start dose to Max Start dose. Fuel ramp is activated when RPM > 10.
Step: 1 s
Range: 1 – 999 s
INCON - 3.1, ©ComAp – May 2006 18
INCON-3.1r1.pdf
Fuel
Max Start Dose
Init Start Dose
Fuel Ramp Time
Time
Start Ramp Time [s]
Ramp speed from Start RPM to Idle RPM.
Step: 1s
Range: 1 – 999 s
Start RPM [ RPM ]
If engine speed is higher than this limit, governor ends start sequence and begins the speed regulation.
Step: 1 RPM
Range: 1 – 400 RPM
Speed
Idle RPM
Start Ramp Time
Start RPM
Time
PID SET - P
Gain [%]
Gain of the speed PID loop.
Step: 0.1%
Range: 0 – 999.9 %
Integration [%]
Integration part of the speed PID loop.
Step: 0.1%
Range: 0 – 200.0 %
Derivation [%]
Derivative part of the speed PID loop.
Step: 0.1%
Range: 0 – 200.0 %
INCON - 3.1, ©ComAp – May 2006 19
INCON-3.1r1.pdf
Maximum Dose [ 0.1°]
Maximum average fuel dose for all cylinders is limited by setpoint Maximum dose. Actual dose for individual
cylinders can be higher due to temperature compensation. Maximum dose does not limit the Initial Start
Dose and Max Start Dose.
Step: 0.1 o
Range: 0 to 180.0 o
MaxStartUp dose [ 0.1°]
Dose limit between Idle RPM and Rated RPM during starting procedure. Dose limit changes to Maximum
dose after engine reach the Rated RPM.
Step: 0.1 o
Range: 0 to 180.0 o
Droop [%]
Immediate droop is calculated from immediate fuel dose and setpoints Droop, No Load Dose and Full Load
Dose.
Step: 0.1%
Range: 0 – 15.0 %
No Load Dose [°]
Fuel dose on no load and nominal speed, it is used for calculation of governor droop.
Step: 0.1 o
Range: 0 to 180.0 o
Full Load Dose [°]
Fuel dose on full load and nominal speed, it is used for calculation of governor droop.
Step: 0.1 o
Range: 0 to 180.0 o
Hint:
No Load Dose and Full Load Dose is used as Droop reference and reference for Low power and High power
temperature corrections.
If binary input DROOP is active and setpoint Droop is non-zero, the Requested RPM decays with the
governor fuel dose. Parameters Droop, No Load Dose and Full Load Dose are used for calculation of actual
Requested RPM, see the figure below.
Requested RPM
Nominal RPM
Nominal RPM - Droop
Fuel Dose
No Load Dose Maximum Dose
INCON - 3.1, ©ComAp – May 2006 20
INCON-3.1r1.pdf
VALVE CONFIG -V
Out A FirOrder [-]
Defines position of the Physical output terminal B in the engine firing order. Set to 0 when INCON output is
not used. Usually Physical output A is connected to the cylinder 1 and thus setpoint Out A FirOrder is
position of cylinder 1 in firing order of the engine.
Range: 0 – 24
Out B FirOrder [-]
Defines position of the Physical output terminal B of INCON in the cylinder firing order. Set to 0 when INCON
output is not used. Usually Physical output B is connected to the cylinder 2 and thus setpoint Out B FirOrder
is position of cylinder 2 in firing order of the engine.
Range: 0 – 24
… to …
Out L FirOrder [-]
Defines position of the Physical output terminal L of INCON in the cylinder firing order. Set to 0 when INCON
output is not used. Usually Physical output L is connected to the cylinder 12 and thus setpoint Out L FirOrder
is position of cylinder 12 in firing order of the engine.
Range: 0 – 24
Example of 8 cylinders configuration.
Wiring
INCON2 Engine Setpoints setting Cylinder fire order
output cylinder (example)
K1: 1, 2 - A 1 Out A FirOrder 1 1
K1: 3, 4 - B 2 Out B FirOrder 3 3
K1: 5, 6 - C 3 Out C FirOrder 5 5
K1: 7, 8 - D 4 Out D FirOrder 7 7
K1: 9,10 - E 5 Out E FirOrder 2 2
K1:11,12 - F 6 Out F FirOrder 4 4
K6: 1, 2 - G 7 Out G FirOrder 6 6
K6: 3, 4 - H 8 Out H FirOrder 8 8
K6: 5, 6 - I Not used Out I FirOrder 0 Not used
K6: 7, 8 - J Not used Out J FirOrder 0 Not used
K6: 9,10 - K Not used Out K FirOrder 0 Not used
K6:11,12 - L Not used Out L FirOrder 0 Not used
Injection Start [ 0.1°]
This parameter defines the point when the valves open, a crank angle from Top Dead Center to opening of
gas valves, see the figure below.
Step: 0,1o
Range: 0 to 180.0o
TDC = 0
Injection Start
DOSE control
range
Maximum Dose
180
INCON - 3.1, ©ComAp – May 2006 21
INCON-3.1r1.pdf
VALVE CONTROL -R
Opening Delay [ 0.1ms ]
There is a delay between the time when voltage is applied to the electromagnetic gas valves and time when
the valves really open. This delay is compensated by parameter Opening Delay. See documentation of gas
valves for recommended value.
Step: 0.1 ms
Range: 0 – 99.9 ms
There are two different modes of control of the current passing through a coil of gas valve electromagnet:
- Opening period; full voltage of INCON's internal High voltage supply is connected to the coil to open
the valve as soon as possible
- Retaining period; current through the coil is controlled by PWM regulation
100%
GEV Current
Peak
current
Holding current
Time
Peak Current [ 0.1% ]
See documentation of gas valve for recommended value.
Step: 0.1 %
Range: 0 – 100.0 %
Holding Current [ 0.1% ]
See documentation of gas valve for recommended value.
Step: 0.1 %
Range: 0 – 100.0 %
Hint:
Valves control is activated above 20 RPM during engine start and deactivated below 10 RPM during engine
stop. The valves are closed below 10 RPM. These limits are fix.
Scope setting [ Std, RPM, A to L ]
Setting Valve control: Scope settings = [Std, RPM, A-L] changes the Scope (RS232 diagnostics data)
channels structure:
Std RPM A-L
Channel 1 RPM (actual) RPM (actual) RPM (actual)
Channel 2 RPM (request) TDC (actual) GAV A – L current
Channel 3 Dose CAM (actual) Actual fuel dose
Channel 4 Droop 0 (not used) “A” = selected GAV
INCON - 3.1, ©ComAp – May 2006 22
INCON-3.1r1.pdf
TEMPER COMP - C
INCON-2 uses two methods of compensation of exhaust gas temperatures from individual cylinders:
a) Linear “fix” correction of opening period of gas valves in dependency on average fuel dose. For each
individual cylinder is possible to set correction that is added or deducted from the average fuel dose.
Correction is set for two values of engine load (fuel dose). Correction for different engine loads is linear
interpolation in between these two points.
b) Feedback corrections based on exhaust temperatures of individual cylinders. Exhaust gas temperatures
are measured by external device and send to INCON via CAN bus.
INCON compares temperature of each cylinder with average value and depends on temperature difference
modify corrections of all cylinders. Setpoint Temperature compensation: Corr Gain (it was constant Corr
Step in v 2.0) is temperature difference multiplying factor. Correction change depends on temperature
difference of this cylinder and Corr Gain.
Automatic correction starts (after activation) from fix setting of Cylx Corr Low and Cylx Corr High. Each
cylinder correction is limited by Corr Limit setpoint (can not be higher). Correction value is limited to Corr
Limit when Cylx Corr Low and Cylx Corr High setting is over this limit - after automatic correction is
activated.
Period between corrections and amplitude of corrections are settable. If the measured temperatures are
not valid, (e.g. because of sensor fail on some cylinder), INCON-2 automatically switches to compensation
method a).
Closed RUN input activates automatic corrections in Automatic mode when Basic settings: Ext Fuel Control
= 1, i.e. external speed governor (e.g. ECON-2S) is used.
Automatic corrections are activated after engine reach Rated RPM (after Binary input RATED is closed)
when Basic settings: Ext Fuel Control = 0, i.e. INCON internal speed governor is used. Aut.corrections are
switched off when Binary input RATED is opened.
Automatic correction activation:
Internal speed governor When RPM reaches Rated RPM, stays active until engine stop.
External speed governor When Bin input RUN is closed.
Hint:
Always set setpoints for compensation method a), because they may be needed if there is any problem on
thermocouples, external analog modules or CAN bus.
u el
g eF -75
e ra
Av
uel
v e rage F on
A recti
+ cor
+50
Cyl1_Corr_L
No Load Dose Full Load Dose
Cyl 1 Corr Low [ 0.1° ]
Defines the correction of cylinder no 1 on 0° dose.
Step: 0.1 o
Range: -99.9 to 99.9 o
Cyl 1 Corr High [ 0.1° ]
Defines the correction of cylinder no 1 on 180° dose.
INCON - 3.1, ©ComAp – May 2006 23
INCON-3.1r1.pdf
Step: 0.1 o
Range: -99.9 to 99.9 o
Cyl2 Corr Low, Cyl2 Corr High [ 0.1° ]
… to …
Cyl12 Corr Low, Cyl12 Corr High [ 0.1° ]
Hint:
The cylinder number means position in “Engine cylinder numbering”, not in firing order of the engine.
Automatic Corr [ 0 / 1 / 2]
Parameter enables/disables automatic correction = exhaust temperatures compensation.
Automatic Corr = 0
Automatic exhaust temperature compensation is disabled and each cylinder actual dose correction is based
on fix (manual) setting - see setpoints Temperature compensation: Cylx Corr Low, Cylx Corr High.
Automatic Corr = 1
Automatic exhaust temperature compensation is enabled. Each cylinder temperature compensation starts
from fix (manual) setting - see setpoints Temperature compensation: Cylx Corr Low, Cylx Corr High after
compensation is activated.
Automatic Corr = 2
Automatic exhaust temperature compensation is enabled. Each cylinder temperature compensation starts
from 0 (fix) setting after compensation is activated. Starting value does not depend on Temperature
compensation setting.
Automatic Corr Automatic temperature compensation Compensation starting point
0 DISABLED, each cylinder correction is fix based on Temperature compensation setting.
1 ENABLED Fix, based on Temperature compensation setting.
2 ENABLED Starts from zero correction.
When automatic correction is activated:
• Basic settings: Ext Fuel Control = 1, i.e. external speed governor (e.g. ECON-2S) is used.
Closed K5:9 binary input RUN activates automatic corrections when Automatic mode is activated (Automatic
Corr = 1 or 2).
• Basic settings: Ext Fuel Control = 0, i.e. INCON internal speed governor is used.
Automatic corrections are activated after engine speed request reach Basic setting: Rated RPM (after
Binary input RATED is closed). Automatic corrections are deactivated when Binary input RATED is opened.
Ext Fuel Control Aut.correction is activated when
0 Binary inputs RUN and RATED are closed.
Speed request reach Basic setting: Rated RPM
1 Binary input RUN (K5:9) is closed.
Hint:
If automatic correction is enabled and no frames with exhaust temperatures are detected on CAN bus, BO
WARNING is closed and INCON uses fix corrections based on Cyl1 Corr Low, Cyl1 Corr High, …Cyl12 Corr
Low, Cyl12 Corr High.
Correction of one cylinder is switched to fix value if corresponding cylinder temperature sensor fails.
Contr Addr [ 34 – 122 ]
Incon Address on the can BUS. Default settings for IS/BF controller is 77.
Step: 1
Range: 34 – 122
Corr Period [s]
Time between two correction calculations.
Step: 1 s
INCON - 3.1, ©ComAp – May 2006 24
INCON-3.1r1.pdf
Range: 1 – 600 s
Corr Gain [ 0.1°]
INCON compares temperature of each cylinder with average value and depends on temperature difference
modifies corrections of all cylinders. Corr Gain is cylinder temperature difference multiplying factor.
Example: 100% Corr Gain gain makes correction step 2,5° for temperature difference 1 °C.
Step: 1 %
Range: 0 – 100 %
Corr Limit [ 0.1°]
Maximum absolute value of correction. Automatic correction is reduced to this limit even if fix correction is
set higher by Cylx Corr High and Cylx Corr Low setpoints. If correction of any cylinder reaches this limit,
binary output WARNING is activated.
Step: 0.1°
Range: 0 – 99.9°
Hint:
Manual temperature correction can be set out of Corr Limit without WARNING when Automatic correction is
switched OFF.
List of possible warnings and shutdowns
16 bit status word is available on the CAN bus. Separate bits can be configured in Master (e.g. InteliDrive)
controller to be visible on the screen.
Bit Function Bit Function
0 BI state: Droop 8 RPM pickup fail (in relation between pickups)
1 BI state: Rated 9 TDC pickup fail (in relation between pickups)
2 BI state: Run 10 CAM pickup fail (in relation between pickups)
3 BI state: RPM increase 11 Over speed
4 BI state: RPM decrease 12 Warning temperature limit
5 BO state: Warning 13 RPM lost (for speed control)
6 BO state: INCON fail 14 Common fail RPM, TDC, CAM (deayed against
bits 8, 9, 10).
7 Invalid setpoints 15 Not used
Note:
Bits 0 to 4 are mirror of binary inputs.
Bits 5 and 6 are mirror of binary outputs.
Bits 8, 9, 10 stays active until the next engine start.
INCON - 3.1, ©ComAp – May 2006 25
INCON-3.1r1.pdf
6. User interface – setpoint menu
There are two PC tools for INCON setpoints modification: WinScope (or WinScopeQ) and InconDump.
WinScope and WinScopeQ
Use PC software WinScopeQ or WinScope for INCON setpoints modification.
Procedure:
Connect RS232 cable between INCON and PC
Start WinScope or WinScopeQ
Use Open connection command
Select Connection: Direct, Controller: ECON/INCON, PC COM port
Select command Terminal – Show
Main menu screens can be switched by Letters (see table below) and Up/Down keys.
MAIN MENU
Info I
Parameters P
Operation O
PARAMETERS:
[unit]
Basic settings B Setpoint description
(adjustment range)
Idle RPM [RPM] (100 ÷ 2000) Engine Idle speed
Rated RPM [RPM] (100 ÷ 2000) Engine Rated (Nominal) speed
Overspeed RPM [RPM] (100 ÷ 2000) Engine Over speed limit
Idle Ramp Time [ RPM/s] (1 – 999) Pass time between Idle and Rated RPM
Pass time between Min and Max Requested
Speed Ramp Time [ s ] (1 – 999)
Speed
Geer Teeth [ - ] (1 ÷ 500) Number of teeth on flywheel
Cylinders Number [ - ] (1 ÷ 24) Number of engine cylinders
Ext Fuel Control [ - ] (0, 1) 1 – internal governor not used
Valve test [ - ] (0, 1) 1 – test of valves
[unit]
Start S Setpoint description
(adjustment range)
Defines end of cranking and start of speed
Start RPM [RPM] (0 ÷ 400)
regulation
Init Start Dose [0.1°] (0 ÷ 180.0) Gas valve opening on crank start
Max Start Dose [0.1°] (0 ÷ 180.0) Maximum valve opening during cranking
Pass time from Initial Start Dose to Max Start
Fuel Ramp Time [ s ] (0 ÷ 999)
Dose during cranking
Start Ramp Time [ RPM/s ] (0 ÷ 999) Pass time from Start RPM to Idle RPM
[unit]
PID set P Setpoint description
(adjustment range)
INCON - 3.1, ©ComAp – May 2006 26
INCON-3.1r1.pdf
Gain [0.1%] (0 ÷ 999.0) Governor gain
Integration [0.1%] (0 ÷ 200.0) Governor integration
Derivation [0.1%] (0 ÷ 200.0) Governor derivative
Maximum Dose [0.1°] (0 ÷ 180.0) Speed regulator output limit
Droop [0.1%] (0 ÷ 15.0) Governor droop
Valve opening on nominal speed
No Load Dose [0.1°] (0 ÷ 180.0)
and no load, Droop reference.
Full Load Dose [0.1°] (0 ÷ 180.0) Droop reference.
[unit]
Valve config V Setpoint description
(adjustment range)
Defines firing order of cylinder connected to
Out A FirOrder [ - ] (0 ÷ 24)
INCON output A.
Defines firing order of cylinder connected to I
Out B FirOrder [ - ] (0 ÷ 24)
INCON output B.
Defines firing order of cylinder connected to
Out C FirOrder [ - ] (0 ÷ 24)
INCON output C.
Defines firing order of cylinder connected to I
Out D FirOrder [ - ] (0 ÷ 24)
INCON output D.
Defines firing order of cylinder connected to
Out E FirOrder [ - ] (0 ÷ 24)
INCON output E.
Defines firing order of cylinder connected to I
Out F FirOrder [ - ] (0 ÷ 24)
INCON output F.
Defines firing order of cylinder connected to
Out G FirOrder [ - ] (0 ÷ 24)
INCON output G.
Defines firing order of cylinder connected to I
Out H FirOrder [ - ] (0 ÷ 24)
INCON output H.
Defines firing order of cylinder connected to
Out I FirOrder [ - ] (0 ÷ 24)
INCON output I.
Defines firing order of cylinder connected to I
Out J FirOrder [ - ] (0 ÷ 24)
INCON output J.
Defines firing order of cylinder connected to
Out K FirOrder [ - ] (0 ÷ 24)
INCON output K.
Defines firing order of cylinder connected to I
Out L FirOrder [ - ] (0 ÷ 24)
INCON output L.
Injection Start [0.1°] (0 ÷ 180.0) Angle from TDC to start of gas injection
[unit]
Valve control R Setpoint description
(adjustment range)
Opening Delay [0.1ms] (0 ÷ 99.9) Opening delay of gas valves
Peak Current [0.1%] (0 ÷ 100.0) Peak valve current
Holding Current [0.1%] (0 ÷ 100.0) Holding valve current
Scope setting [ - ] (Std, RPM, A÷L) RS232 INCON scope settings
Temperature [unit]
(adjustment range) Setpoint description
compensation C
Cyl1 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.1 on low load
Cyl1 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.1 on high load
Cyl2 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.2 on low load
Cyl2 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.2 on high load
Cyl3 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.3 on low load
INCON - 3.1, ©ComAp – May 2006 27
INCON-3.1r1.pdf
Cyl3 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.3 on high load
Cyl4 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.4 on low load
Cyl4 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.4 on high load
Cyl5 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.5 on low load
Cyl5 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.5 on high load
Cyl6 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.6 on low load
Cyl6 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.6 on high load
Cyl7 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.7 on low load
Cyl7 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.7 on high load
Cyl8 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.8 on low load
Cyl8 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.8 on high load
Cyl9 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.9 on low load
Cyl9 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.9 on high load
Cyl10 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.10 on low load
Cyl10 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.10 on high load
Cyl11 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.11 on low load
Cyl11 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.11 on high load
Cyl12 Corr Low [0.1°] (0 ÷ 180.0) Correction of cylinder no.12 on low load
Cyl12 Corr High [0.1°] (0 ÷ 180.0) Correction of cylinder no.12 on high load
Automatic Corr [ - ] (0, 1, 2) Switches ON / OFF automatic correction
Contr Addr [ - ] (34 ÷ 122) INCON address
Corr Period [ s ] (1 ÷ 999) Time between two corrections
Corr Step [0.1°] (0 ÷ 180.0) Constant one correction step
Corr Limit [0.1°] (0 ÷ 180.0) Maximum absolute value of correction
InconDump-1.1
InconDump-1.1 - INCON/ECON setpoints editor functions:
• Load setpoints from binary “ins” file or directly from INCON
• Modify separate setpoints
• Save setpoints to binary “ins” or to text “txt” file
• Print setpoints list
• Download setpoints to INCON
Refer to InconDump-1.1 pdf manual.
INCON - 3.1, ©ComAp – May 2006 28
INCON-3.1r1.pdf
Operational menu
Start WinScopeQ - Terminal – select O = OPERATION DATA
STATUS
RPM=OK Engine RPM Ovs=No Over speed status
TDC=OK Top dead center sensor UnS=No Under speed status
CAM=OK CAM shaft sensor TCo=No Temperature correction on limit status
TEMPERATURE (received via CAN bus)
A= 400 Temperature of cylinder connected to D= 400 Temperature of cylinder connected to
INCON output A INCON output D
B= 400 … dtto output B E= 400 … dtto output E
C= 400 … dtto output C F= 400 … dtto output F
TEMPERATURE
G= 400 … dtto output G J= 400 … dtto output J
H= 400 … dtto output H K= 400 … dtto output K
I= 400 … dtto output I L= 400 … dtto output L
DOSE CORRECTION
A= +0 Actual dose correction for output A D= +0 Actual dose correction for output D
B= +0 Actual dose correction for output B E= +0 Actual dose correction for output E
C= +0 Actual dose correction for output C F= +0 Actual dose correction for output F
DOSE CORRECTION
G= +0 Actual dose correction for output G J= +0 Actual dose correction for output J
H= +0 Actual dose correction for output H K= +0 Actual dose correction for output K
I= +0 Actual dose correction for output I L= +0 Actual dose correction for output L
OPERATION DATA
RPM= 0 Engine RPM
DOSE= 0 Fuel dose
INCON - 3.1, ©ComAp – May 2006 29
INCON-3.1r1.pdf
7. Technical data
Power supply
Voltage supply 18 – 36V DC
Consumption 2 – 12A
Operating conditions
Operating temperature -20..+70oC
Storage temperature -30..+80oC
Protection front panel IP65
Humidity 85% without condensation
Standard conformity
Low Voltage Directive EN 61010-1:95 +A1:97
Electromagnetic Compatibility EN 50081-1:94, EN 50081-2:96
EN 50082-1:99, EN 50082-2:97
Dimensions and weight
Dimensions 400x230x111mm
Weight 3,5 kg
Binary inputs and outputs
Binary inputs
Electrically separated
Number of inputs 5
Input resistance 4,7 kΩ
Input range 0-36 VDC
Switching voltage level for close contact indication 0-2 V
Max voltage level for open contact indication 8-36 V
Contact relay outputs
Electrically separated
Number of outputs 2
Electric life cycle min 100.000 switching cycles
Maximum current 1 A DC resistive load
Maximum switching voltage 36 VDC
Minimum load 24 V / 0,1 A
Insulation voltage 500 Veff
RPM pickup input
Type of sensor magnetic pick-up
Minimum input voltage 3 Vpk-pk (from 4 Hz to 4 kHz)
Maximum input voltage 50 Veff
Minimum measured frequency 4 Hz
Maximum measured frequency 10 kHz (min. input voltage 6Vpk-pk)
Frequency measurement tolerance 0,5 %
TDC pickup input
Type of sensor magnetic pick-up or active pickup with PNP or NPN output
Minimum input voltage 3 Vpk-pk
Maximum input voltage 50 Veff
INCON - 3.1, ©ComAp – May 2006 30
INCON-3.1r1.pdf
Camshaft pickup input
Type of sensor active pickup with PNP or NPN output
Minimum input voltage 3 Vpk-pk
Maximum input voltage 50 Veff
INCON - 3.1, ©ComAp – May 2006 31
INCON-3.1r1.pdf
S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Zexel Injector PressureDocument181 paginiZexel Injector PressureSoeAye100% (3)
- Electric Brewing Supply Wiring+Guide-2018Document87 paginiElectric Brewing Supply Wiring+Guide-2018SoeAyeÎncă nu există evaluări
- Spare Parts Manual D399 ModDocument2.649 paginiSpare Parts Manual D399 ModYuriy Senyk100% (4)
- D475-D466-Engine PMDocument245 paginiD475-D466-Engine PMMahmmod Al-Qawasmeh100% (1)
- Vfds Eliminate The Need For Plcs and External HardwareDocument2 paginiVfds Eliminate The Need For Plcs and External HardwareSoeAyeÎncă nu există evaluări
- LM2907 and LM2917 Frequency To Voltage Converter: 1 Features 3 DescriptionDocument41 paginiLM2907 and LM2917 Frequency To Voltage Converter: 1 Features 3 DescriptionSoeAyeÎncă nu există evaluări
- Front Panel Instruction: DC1010/1020/1030/1040 PRODUCT MANUALDocument28 paginiFront Panel Instruction: DC1010/1020/1030/1040 PRODUCT MANUALSoeAyeÎncă nu există evaluări
- Part 2Document72 paginiPart 2SoeAyeÎncă nu există evaluări
- DC Motor Control Using Arduino: 1) IntroductionDocument10 paginiDC Motor Control Using Arduino: 1) IntroductionSoeAyeÎncă nu există evaluări
- ED318918Document301 paginiED318918SoeAyeÎncă nu există evaluări
- Fuel Rack Distance Sensor PDFDocument3 paginiFuel Rack Distance Sensor PDFSoeAyeÎncă nu există evaluări
- China Balin Power Co.,LtdDocument12 paginiChina Balin Power Co.,LtdSoeAyeÎncă nu există evaluări
- Adjustable Fuel Pressure Regulator: Special Tools Required: Install Time: DifficultyDocument1 paginăAdjustable Fuel Pressure Regulator: Special Tools Required: Install Time: DifficultySoeAyeÎncă nu există evaluări
- Experimental Analysis of A Turbo-Charged Common-Rail Diesel Engine Ueled With BiodieselDocument4 paginiExperimental Analysis of A Turbo-Charged Common-Rail Diesel Engine Ueled With BiodieselSoeAyeÎncă nu există evaluări
- Jr403e Transmission PDFDocument120 paginiJr403e Transmission PDFSoeAyeÎncă nu există evaluări
- Stanadyne Inyectores y ToberasDocument70 paginiStanadyne Inyectores y ToberasMas Inyeccion Electronica100% (1)
- Arduino: The Visuino Project - Part 3 Page - 1/16 Create Your Own Components For VisuinoDocument16 paginiArduino: The Visuino Project - Part 3 Page - 1/16 Create Your Own Components For VisuinoSoeAyeÎncă nu există evaluări
- Displays, I C Protocol: The Source Code of All Examples Can Be Downloaded FromDocument12 paginiDisplays, I C Protocol: The Source Code of All Examples Can Be Downloaded FromSoeAyeÎncă nu există evaluări
- S70MC-C8 2 PDFDocument348 paginiS70MC-C8 2 PDFVuich ToanÎncă nu există evaluări
- Chotia-460 NewManualDocument8 paginiChotia-460 NewManualErin LassleyÎncă nu există evaluări
- Non Conventional IC EngineDocument8 paginiNon Conventional IC EngineKiran KumarÎncă nu există evaluări
- Arona CA 10B - CM 10B - Maintenance Manual and Spare Parts Catalogue - Part IDocument14 paginiArona CA 10B - CM 10B - Maintenance Manual and Spare Parts Catalogue - Part Ibapsi01100% (1)
- Aerospace Engine DataDocument5 paginiAerospace Engine DatapbonnetÎncă nu există evaluări
- C4.4 / C6.6 Service Tools: Basic ListDocument6 paginiC4.4 / C6.6 Service Tools: Basic ListAlberto PA100% (1)
- Kymco Service Manual People S 50Document4 paginiKymco Service Manual People S 50András SzántaiÎncă nu există evaluări
- S02 Diesel EngineDocument150 paginiS02 Diesel EngineSales AydinkayaÎncă nu există evaluări
- Gas/ Hydraulic Valve Operators and Control SystemsDocument13 paginiGas/ Hydraulic Valve Operators and Control SystemsSergioUlisesÎncă nu există evaluări
- Catalogo PDF TeriosDocument404 paginiCatalogo PDF TeriosAlvaro Necochea Muñoz71% (7)
- D5A Ta: Volvo Penta Inboard DieselDocument2 paginiD5A Ta: Volvo Penta Inboard DieselTerah Pio100% (1)
- Ju6h Ufg8 Usa PDFDocument13 paginiJu6h Ufg8 Usa PDFceciliagaitanÎncă nu există evaluări
- Cryogenic Rocket Engine 21Document17 paginiCryogenic Rocket Engine 21sk sanketÎncă nu există evaluări
- Transonic Engine 1Document18 paginiTransonic Engine 1divyank kumar100% (2)
- HiMSEN Global Academy CurriculumDocument1 paginăHiMSEN Global Academy CurriculumAhmed MagdyÎncă nu există evaluări
- Measuring Cylinder BoreDocument38 paginiMeasuring Cylinder BoreiqbalÎncă nu există evaluări
- Sample Problems Gas TurbinesDocument7 paginiSample Problems Gas TurbinesPatricia PachecoÎncă nu există evaluări
- 2 - S SJ Series - Tappet SettingDocument48 pagini2 - S SJ Series - Tappet SettingSuresh RajÎncă nu există evaluări
- Caterpillar ElectronicDocument9 paginiCaterpillar ElectronicMarcoÎncă nu există evaluări
- Solar Spare PartDocument2 paginiSolar Spare PartMRezaÎncă nu există evaluări
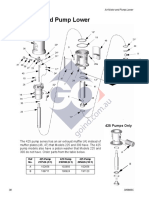
- GO Manual Graco Fire-Ball 425 Parts ListingDocument4 paginiGO Manual Graco Fire-Ball 425 Parts ListingLechelonÎncă nu există evaluări
- Looking After Your Rotax 912 Series EngineDocument20 paginiLooking After Your Rotax 912 Series EngineDimitris SarmasÎncă nu există evaluări
- Engine Bearing Failure Analysis PDFDocument20 paginiEngine Bearing Failure Analysis PDFgume pesaÎncă nu există evaluări
- Lec2 PDFDocument28 paginiLec2 PDFJaco MarketlandÎncă nu există evaluări
- 74436GDocument454 pagini74436Gnosuvito100% (1)
- QuickServe Online - (3666087) B3.9, B4.5, B4.5 RGT, and B5.9 Service ManualDocument20 paginiQuickServe Online - (3666087) B3.9, B4.5, B4.5 RGT, and B5.9 Service ManualArief FadillaÎncă nu există evaluări
- Caterpillar Cat 330B L Excavator (Prefix 5LR) Service Repair Manual (5LR00001 and Up)Document27 paginiCaterpillar Cat 330B L Excavator (Prefix 5LR) Service Repair Manual (5LR00001 and Up)kfm8seuudu100% (1)
- Performance of Gas Turbine EngineDocument35 paginiPerformance of Gas Turbine EngineKusmaliah Oksa100% (1)