S-ar putea să vă placă și
- Communication Interface: SR253 Series Digital ControllerDocument48 paginiCommunication Interface: SR253 Series Digital ControllerChristianÎncă nu există evaluări
- Communication Interface: SD16 Series Digital IndicatorDocument16 paginiCommunication Interface: SD16 Series Digital IndicatorChristianÎncă nu există evaluări
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsDe la EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsEvaluare: 1 din 5 stele1/5 (1)
- FTDI-LED User ManualDocument6 paginiFTDI-LED User ManualAngelica LeyvaÎncă nu există evaluări
- RS232 InterfacingDocument41 paginiRS232 InterfacingPuspala ManojkumarÎncă nu există evaluări
- Exploring Arduino: Tools and Techniques for Engineering WizardryDe la EverandExploring Arduino: Tools and Techniques for Engineering WizardryEvaluare: 4.5 din 5 stele4.5/5 (5)
- Communication Interface: MR13 Series Digital ControllerDocument18 paginiCommunication Interface: MR13 Series Digital ControllerChristianÎncă nu există evaluări
- Communication Interface: SR90 Series Digital ControllerDocument16 paginiCommunication Interface: SR90 Series Digital ControllerChristianÎncă nu există evaluări
- Communication Interface: EM70 Servo ControllerDocument16 paginiCommunication Interface: EM70 Servo ControllerChristianÎncă nu există evaluări
- Technical Manual For Enhanced Data Switch Unit (EDSU) : HW Revision 1.2 SW Revision 2.1aDocument22 paginiTechnical Manual For Enhanced Data Switch Unit (EDSU) : HW Revision 1.2 SW Revision 2.1aJon CornishÎncă nu există evaluări
- Dokumen - Tips - Protocol Description Iec 60870 5 101Document18 paginiDokumen - Tips - Protocol Description Iec 60870 5 101alextivanÎncă nu există evaluări
- USB Port Setting Ver.1.0 EngDocument13 paginiUSB Port Setting Ver.1.0 EngLuis CuberoÎncă nu există evaluări
- Si3226/7 Si3208/9: D P Slic DC-DC CDocument38 paginiSi3226/7 Si3208/9: D P Slic DC-DC CDarwin SipayungÎncă nu există evaluări
- SH - BX4000 Online InterfaceDocument36 paginiSH - BX4000 Online InterfaceRuny RunyÎncă nu există evaluări
- Appendix On Communication StandardsDocument9 paginiAppendix On Communication StandardsTiến BùiÎncă nu există evaluări
- XP-Series ASTM Communication Specifications en Ver.1.0 (R312006)Document18 paginiXP-Series ASTM Communication Specifications en Ver.1.0 (R312006)Aron Raymond0% (1)
- Serial Communication ProtocolsDocument32 paginiSerial Communication ProtocolsVissu Sweet100% (1)
- NOJA-520-03 SCADA Interface DescriptionDocument21 paginiNOJA-520-03 SCADA Interface DescriptionAlejandro MelgarejoÎncă nu există evaluări
- Rs485 Modbus CommunicationDocument44 paginiRs485 Modbus CommunicationmaninderpreetÎncă nu există evaluări
- Communication Interface: FP93 Program ControllerDocument24 paginiCommunication Interface: FP93 Program ControllerChristianÎncă nu există evaluări
- Horiba Yumizen H500 - Interfaceamento v2Document36 paginiHoriba Yumizen H500 - Interfaceamento v2Mateus Batista100% (1)
- RS232 ManualDocument38 paginiRS232 Manualnassim benchaibÎncă nu există evaluări
- CA400 LIS CommunicationDocument33 paginiCA400 LIS CommunicationXeenÎncă nu există evaluări
- UART/RS232/RS485 Over Powerline Communication Transceiver Module User ManualDocument22 paginiUART/RS232/RS485 Over Powerline Communication Transceiver Module User Manualsameen11Încă nu există evaluări
- NC-217 - NMEA Data CombinerDocument22 paginiNC-217 - NMEA Data CombinerthrodisÎncă nu există evaluări
- ST54 DataSheetDocument10 paginiST54 DataSheetsaikiranÎncă nu există evaluări
- ADPC-101 - Manual Analog To Digital ConverterDocument30 paginiADPC-101 - Manual Analog To Digital ConverterKeziah SusannaPrinceÎncă nu există evaluări
- SV-iP5A or IV5 User ManualDocument25 paginiSV-iP5A or IV5 User ManualTechnology HelperÎncă nu există evaluări
- N 700 Ers 485 InterfacemanualDocument17 paginiN 700 Ers 485 InterfacemanualpabloÎncă nu există evaluări
- IWC Manual Issue 2Document18 paginiIWC Manual Issue 2woody8112Încă nu există evaluări
- Serial Interface RS485 (RS422) Configuration InstructionsDocument20 paginiSerial Interface RS485 (RS422) Configuration Instructionsyana sopian hidayatÎncă nu există evaluări
- Manual PLC Click ModbusDocument44 paginiManual PLC Click ModbusDavid Mtz ZuritaÎncă nu există evaluări
- E560 Cid11 CS PDFDocument15 paginiE560 Cid11 CS PDFmaximiliano tonsich100% (1)
- WW-J002 Serial Server (Data Connector) Manual V1.03Document10 paginiWW-J002 Serial Server (Data Connector) Manual V1.03Haytham AldamenÎncă nu există evaluări
- Mac 10 DDocument27 paginiMac 10 DĐức ĐàmÎncă nu există evaluări
- DELTA IA-MDS VFD-C-Optional-CMC-PD01 OM EN 20110628Document34 paginiDELTA IA-MDS VFD-C-Optional-CMC-PD01 OM EN 20110628ASI JOBÎncă nu există evaluări
- Introduction To Serial Data CommunicationDocument32 paginiIntroduction To Serial Data CommunicationVickyÎncă nu există evaluări
- Datasheet SDP600series Differential Pressure SensorDocument9 paginiDatasheet SDP600series Differential Pressure SensorRahul Albuquerque100% (1)
- Idm-6830 and Idm-7842dag (C)Document22 paginiIdm-6830 and Idm-7842dag (C)BOsy Ying LoÎncă nu există evaluări
- CL7206C4 User Manual 2018Document21 paginiCL7206C4 User Manual 2018Jack WyhÎncă nu există evaluări
- Tech Serial v1r0c0 PDFDocument15 paginiTech Serial v1r0c0 PDFsalehimohsen13514969100% (1)
- AD IFC070 Modbus en 160809 4005415901 R01Document32 paginiAD IFC070 Modbus en 160809 4005415901 R01Anil NairÎncă nu există evaluări
- XK3118 - D2008F (A、P、P1) technical manual bookDocument42 paginiXK3118 - D2008F (A、P、P1) technical manual bookvuong buiÎncă nu există evaluări
- NetworkAIR CW Supervisory Network Install and Setup ManualDocument15 paginiNetworkAIR CW Supervisory Network Install and Setup ManualRafael BonatoÎncă nu există evaluări
- 420 Key EncoderDocument22 pagini420 Key EncoderDilip KumarÎncă nu există evaluări
- Tudo o Que Você Precisa Aprender Sobre Pinagens de Conectores SeriaisDocument10 paginiTudo o Que Você Precisa Aprender Sobre Pinagens de Conectores SeriaisVitorino JuniorÎncă nu există evaluări
- TASCAM CD-400U/CD-400UDAB CONTROL I/O Terminals RS-232C TELNET Protocol SpecificationsDocument28 paginiTASCAM CD-400U/CD-400UDAB CONTROL I/O Terminals RS-232C TELNET Protocol SpecificationsChhim AnasÎncă nu există evaluări
- Esp32 Wroom 32d Esp32 Wroom 32u Datasheet enDocument27 paginiEsp32 Wroom 32d Esp32 Wroom 32u Datasheet enjaysenghaniÎncă nu există evaluări
- RS 232 Specification StandardDocument9 paginiRS 232 Specification StandardTetsusaigaÎncă nu există evaluări
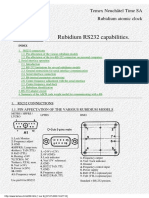
- Rubidium RS232 Capabilities.: Temex Neuchâtel Time SA Rubidium Atomic ClockDocument6 paginiRubidium RS232 Capabilities.: Temex Neuchâtel Time SA Rubidium Atomic ClockpdamocÎncă nu există evaluări
- RS-232 Transducer Digital Communication: User's ManualDocument28 paginiRS-232 Transducer Digital Communication: User's ManualPAULA AGUILERAÎncă nu există evaluări
- Operating Manual: Power / Phase Angle / Power Factor TransducerDocument44 paginiOperating Manual: Power / Phase Angle / Power Factor TransducerpadmawarÎncă nu există evaluări
- Mrds 1322Document20 paginiMrds 1322pablomendivilÎncă nu există evaluări
- RS232 CommunicationsDocument37 paginiRS232 CommunicationsNoor Kareem100% (1)
- Manual D2008fa G C PDFDocument38 paginiManual D2008fa G C PDFAk100% (1)
- Esp32-Wroom-32 Datasheet enDocument27 paginiEsp32-Wroom-32 Datasheet enSichzeugÎncă nu există evaluări
- Mpc1 Multi Purpose Can Controller - Reference Manual: Baldur Gíslason December 17, 2018Document6 paginiMpc1 Multi Purpose Can Controller - Reference Manual: Baldur Gíslason December 17, 2018Andrzej GomulaÎncă nu există evaluări
- 26 ManualDocument41 pagini26 ManualChristianÎncă nu există evaluări
- Displacer LT CalibrationDocument11 paginiDisplacer LT CalibrationChristianÎncă nu există evaluări
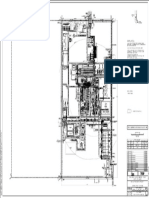
- Rc2 Osbl Plot Plan 1Document1 paginăRc2 Osbl Plot Plan 1ChristianÎncă nu există evaluări
- InstrumentationDocument104 paginiInstrumentationAhmed Jebreel75% (4)
- RTD Sensor ConnectionsDocument12 paginiRTD Sensor ConnectionsChristianÎncă nu există evaluări
- Electrical QuestionsDocument220 paginiElectrical QuestionsChristianÎncă nu există evaluări
- Telecommunications For Oil and Gas PDFDocument9 paginiTelecommunications For Oil and Gas PDFsaihuÎncă nu există evaluări
- Ip PDFDocument1 paginăIp PDFecruz_yhwhÎncă nu există evaluări
- RPG Cable GlandsDocument6 paginiRPG Cable GlandsAhamed AshithÎncă nu există evaluări
- Oisd STD 153Document34 paginiOisd STD 153Anonymous i3lI9M100% (3)
- NEMA, UL, and IP Rating CodesDocument12 paginiNEMA, UL, and IP Rating CodesDasuki FahmiÎncă nu există evaluări
- White Paper Series Electrical Ground RulesDocument22 paginiWhite Paper Series Electrical Ground RulesChristianÎncă nu există evaluări
- Cable To Gland Selection ChartDocument2 paginiCable To Gland Selection ChartChristianÎncă nu există evaluări
- Ytha Yu, Charles Marut-Assembly Language Programming Organization of The IBM PC (1992)Document551 paginiYtha Yu, Charles Marut-Assembly Language Programming Organization of The IBM PC (1992)harini90% (72)
- NEMA Enclosure Types 11-05-2Document9 paginiNEMA Enclosure Types 11-05-2Duron SaavedraÎncă nu există evaluări
- Method Statement Instrument Loop Checking QA 00 057 B PDFDocument10 paginiMethod Statement Instrument Loop Checking QA 00 057 B PDFChristianÎncă nu există evaluări
- CC-LINK Interface: SR83 Digital ControllerDocument24 paginiCC-LINK Interface: SR83 Digital ControllerChristianÎncă nu există evaluări
- Shimaden LiteDocument32 paginiShimaden LiteChristianÎncă nu există evaluări
- Telephone Unit SpecsDocument10 paginiTelephone Unit SpecsChristianÎncă nu există evaluări
- Communication Interface: SR90 Series Digital ControllerDocument16 paginiCommunication Interface: SR90 Series Digital ControllerChristianÎncă nu există evaluări
- Instruction Manual: SR253 Series Digital ControllerDocument64 paginiInstruction Manual: SR253 Series Digital ControllerChristianÎncă nu există evaluări
- SR90 Series: (SR91, SR92, SR93, SR94) Digital ControllerDocument32 paginiSR90 Series: (SR91, SR92, SR93, SR94) Digital ControllernorbertÎncă nu există evaluări
- Shimaden Lite PDFDocument32 paginiShimaden Lite PDFChristianÎncă nu există evaluări
- Instruction Manual: SD16 Series Digital IndicatorDocument8 paginiInstruction Manual: SD16 Series Digital IndicatorChristianÎncă nu există evaluări
- sd20 StandardDocument24 paginisd20 StandardChristianÎncă nu există evaluări
- Sr90 StandardDocument26 paginiSr90 Standardflorin74Încă nu există evaluări
- Program Function Instruction Manual: MR13 Series Digital ControllerDocument4 paginiProgram Function Instruction Manual: MR13 Series Digital ControllerChristianÎncă nu există evaluări
- Bluetooth 5.1 Dual Mode Module Datasheet Version 1.5: FSC-BT1026x DatasheetDocument38 paginiBluetooth 5.1 Dual Mode Module Datasheet Version 1.5: FSC-BT1026x DatasheetJuliano RettoreÎncă nu există evaluări
- Job Log After Code ChangeDocument7 paginiJob Log After Code ChangetalupurumÎncă nu există evaluări
- (TUTORIAL) Unlock Sim Network On Samsung Galaxy Mini S5570, Ace S5830, Gio S5660, Pop I559, Fit S5670Document30 pagini(TUTORIAL) Unlock Sim Network On Samsung Galaxy Mini S5570, Ace S5830, Gio S5660, Pop I559, Fit S5670edwartcano50% (2)
- Ampeg SVT450H SchematicDocument3 paginiAmpeg SVT450H SchematicJuanGuajardoÎncă nu există evaluări
- Tabla Eq OsiproxDocument115 paginiTabla Eq OsiproxGERMANÎncă nu există evaluări
- Yeskawa vs-606 PC3 InstructionsDocument210 paginiYeskawa vs-606 PC3 InstructionsRASHID Ansari100% (1)
- Circuit Diagram of Sample and Hold CircuitDocument6 paginiCircuit Diagram of Sample and Hold Circuitalaa delewarÎncă nu există evaluări
- 12.winpass Uk I PDFDocument179 pagini12.winpass Uk I PDFAtman IeeaÎncă nu există evaluări
- Final Year Project Report EditedDocument31 paginiFinal Year Project Report Editedvijaya karthegha.RÎncă nu există evaluări
- FusionSolar Smart String ESS Solution Datasheet-20210928Document9 paginiFusionSolar Smart String ESS Solution Datasheet-20210928EdwinMeoñezÎncă nu există evaluări
- 3va1225 5ef42 0aa0Document5 pagini3va1225 5ef42 0aa0Alexander Urriola JimenezÎncă nu există evaluări
- Admit Card: Examination Centre: Centre CodeDocument1 paginăAdmit Card: Examination Centre: Centre CodezahidÎncă nu există evaluări
- Equitrac Embedded For Kyocera - PDFDocument14 paginiEquitrac Embedded For Kyocera - PDFkjgÎncă nu există evaluări
- AIT-501 ManualDocument2 paginiAIT-501 Manualchandras20Încă nu există evaluări
- Telsen Radiomag No.1Document36 paginiTelsen Radiomag No.1Rick MendelezÎncă nu există evaluări
- Argus LCX: Convenient Vital Data Patient MonitoringDocument4 paginiArgus LCX: Convenient Vital Data Patient MonitoringAzhari DasrilÎncă nu există evaluări
- GHU9 Optical Incremental Encoder enDocument2 paginiGHU9 Optical Incremental Encoder enSergio GarciaÎncă nu există evaluări
- Bluetooth RC Drift CarDocument7 paginiBluetooth RC Drift CarAbanob HanyÎncă nu există evaluări
- Cc1110 Cc2510 Basic Software Examples OverviewDocument9 paginiCc1110 Cc2510 Basic Software Examples Overviewalongdayx3Încă nu există evaluări
- Letter by Letter Abu Taubah S Arabic Alphabet WorkbookDocument2 paginiLetter by Letter Abu Taubah S Arabic Alphabet WorkbookSharief SkÎncă nu există evaluări
- Solution For Assignment 3Document3 paginiSolution For Assignment 3Faizan 'Fezar' RabbaniÎncă nu există evaluări
- MuramasaDocument4 paginiMuramasaThomson AffendyÎncă nu există evaluări
- TLE-CHS-q3 - Mod7 - Basic-Concepts-of-Electricity - (Part-II) M4Document16 paginiTLE-CHS-q3 - Mod7 - Basic-Concepts-of-Electricity - (Part-II) M4OmengMagcalas100% (2)
- Instructions For Use en Xo Flex Version 2 02 PDFDocument95 paginiInstructions For Use en Xo Flex Version 2 02 PDFKaren Jezabel Suarez MoralesÎncă nu există evaluări
- Service Manual: MT1192 19" Color TelevisionDocument54 paginiService Manual: MT1192 19" Color TelevisionHamilton MoranÎncă nu există evaluări
- Laboratory Evaluation of Magnesium Sacrificial Anode Test Specimens For Underground ApplicationsDocument4 paginiLaboratory Evaluation of Magnesium Sacrificial Anode Test Specimens For Underground ApplicationsPippo100% (1)
- Plugin Interface For Flash and HTML5Document30 paginiPlugin Interface For Flash and HTML5tatt2Încă nu există evaluări
- Philippine Grid Code Amendment No.1 - Apr 2 2007Document125 paginiPhilippine Grid Code Amendment No.1 - Apr 2 2007rosario.md1052100% (1)
- M100700D - MME For Fanuc 6 - 11 - 12 ManualDocument38 paginiM100700D - MME For Fanuc 6 - 11 - 12 ManualTony AntonyÎncă nu există evaluări
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepDe la EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepEvaluare: 4.5 din 5 stele4.5/5 (19)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.De la EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Evaluare: 5 din 5 stele5/5 (34)
- Clean Code: A Handbook of Agile Software CraftsmanshipDe la EverandClean Code: A Handbook of Agile Software CraftsmanshipEvaluare: 5 din 5 stele5/5 (13)
- Once Upon an Algorithm: How Stories Explain ComputingDe la EverandOnce Upon an Algorithm: How Stories Explain ComputingEvaluare: 4 din 5 stele4/5 (43)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceDe la EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceÎncă nu există evaluări
- Grokking Algorithms: An illustrated guide for programmers and other curious peopleDe la EverandGrokking Algorithms: An illustrated guide for programmers and other curious peopleEvaluare: 4 din 5 stele4/5 (16)
- GAMEDEV: 10 Steps to Making Your First Game SuccessfulDe la EverandGAMEDEV: 10 Steps to Making Your First Game SuccessfulEvaluare: 4.5 din 5 stele4.5/5 (12)
- Python Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)De la EverandPython Programming For Beginners: Learn The Basics Of Python Programming (Python Crash Course, Programming for Dummies)Evaluare: 5 din 5 stele5/5 (1)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerDe la EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerEvaluare: 4.5 din 5 stele4.5/5 (44)
- Blockchain Basics: A Non-Technical Introduction in 25 StepsDe la EverandBlockchain Basics: A Non-Technical Introduction in 25 StepsEvaluare: 4.5 din 5 stele4.5/5 (24)
- Nine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersDe la EverandNine Algorithms That Changed the Future: The Ingenious Ideas That Drive Today's ComputersEvaluare: 5 din 5 stele5/5 (7)
- How to Make a Video Game All By Yourself: 10 steps, just you and a computerDe la EverandHow to Make a Video Game All By Yourself: 10 steps, just you and a computerEvaluare: 5 din 5 stele5/5 (1)
- Coders at Work: Reflections on the Craft of ProgrammingDe la EverandCoders at Work: Reflections on the Craft of ProgrammingEvaluare: 4 din 5 stele4/5 (151)
- Blockchain: The complete guide to understanding Blockchain Technology for beginners in record timeDe la EverandBlockchain: The complete guide to understanding Blockchain Technology for beginners in record timeEvaluare: 4.5 din 5 stele4.5/5 (34)
- The Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!De la EverandThe Advanced Roblox Coding Book: An Unofficial Guide, Updated Edition: Learn How to Script Games, Code Objects and Settings, and Create Your Own World!Evaluare: 4.5 din 5 stele4.5/5 (2)
- What Algorithms Want: Imagination in the Age of ComputingDe la EverandWhat Algorithms Want: Imagination in the Age of ComputingEvaluare: 3.5 din 5 stele3.5/5 (41)
- Software Engineering at Google: Lessons Learned from Programming Over TimeDe la EverandSoftware Engineering at Google: Lessons Learned from Programming Over TimeEvaluare: 4 din 5 stele4/5 (11)
- Software Development: BCS Level 4 Certificate in IT study guideDe la EverandSoftware Development: BCS Level 4 Certificate in IT study guideEvaluare: 3.5 din 5 stele3.5/5 (2)
- Django Unleashed: Building Web Applications with Python's FrameworkDe la EverandDjango Unleashed: Building Web Applications with Python's FrameworkÎncă nu există evaluări
- Python for Data Analysis: A Beginners Guide to Master the Fundamentals of Data Science and Data Analysis by Using Pandas, Numpy and IpythonDe la EverandPython for Data Analysis: A Beginners Guide to Master the Fundamentals of Data Science and Data Analysis by Using Pandas, Numpy and IpythonÎncă nu există evaluări
- Microsoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.De la EverandMicrosoft 365 Guide to Success: 10 Books in 1 | Kick-start Your Career Learning the Key Information to Master Your Microsoft Office Files to Optimize Your Tasks & Surprise Your Colleagues | Access, Excel, OneDrive, Outlook, PowerPoint, Word, Teams, etc.Evaluare: 5 din 5 stele5/5 (2)