S-ar putea să vă placă și
- SDA - Serial Data, SCL - Serial ClockDocument10 paginiSDA - Serial Data, SCL - Serial ClockPavan Kulkarni100% (3)
- Spi and I2cDocument11 paginiSpi and I2cAbhay Tomar100% (1)
- Serial CommunicationsDocument23 paginiSerial CommunicationsPhuoc Trung Tran100% (1)
- Spi ModuleDocument13 paginiSpi ModuleMuhammadSaeedTahir100% (2)
- Introduction I2c and SPIDocument14 paginiIntroduction I2c and SPIHaris Jeelani100% (1)
- USB To RS232 Using Atmel ATtiny2313 or ATmega8Document4 paginiUSB To RS232 Using Atmel ATtiny2313 or ATmega8Nugraha Indrawan100% (2)
- Ieee 802.11Document13 paginiIeee 802.11jeffy100% (1)
- What Is The Difference Between Microcontrollers and 8051Document6 paginiWhat Is The Difference Between Microcontrollers and 8051Erandi Brito100% (1)
- The Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetDocument6 paginiThe Basics of Ethernet The Basics of Ethernet The Basics of Ethernet The Basics of EthernetRupesh Kumar100% (1)
- HC SR04 PDFDocument3 paginiHC SR04 PDFVipan Sharma100% (1)
- RS 232Document1 paginăRS 232Aneela Pathan100% (1)
- CommchkDocument4 paginiCommchkjamesyu100% (1)
- Tshoot EthernetDocument11 paginiTshoot Ethernetmrigank shekhar100% (1)
- XL MaxSonar WR - Datasheet PDFDocument26 paginiXL MaxSonar WR - Datasheet PDFfernandoviolante8551100% (1)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument28 paginiAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
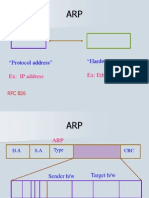
- Details of ARP and PPPDocument40 paginiDetails of ARP and PPPYogesh Palkar100% (1)
- Using Internal EEPROM of PIC Microcontroller - MikroCDocument16 paginiUsing Internal EEPROM of PIC Microcontroller - MikroCdevchandar100% (1)
- X 25Document4 paginiX 25Neeti Saurav Pahuja100% (1)
- Port PDFDocument16 paginiPort PDFdharanika100% (1)
- Masters 2012 - Introduction To Microchip USB SolutionsDocument79 paginiMasters 2012 - Introduction To Microchip USB SolutionsTech[BR]100% (2)
- HC Sr04Document4 paginiHC Sr04Shofol Biswas100% (1)
- Contador Frecuencia 1-50Document4 paginiContador Frecuencia 1-50jose100% (2)
- Uart (Universal Asynchronous Receiver Transmitter) ProtocolDocument3 paginiUart (Universal Asynchronous Receiver Transmitter) Protocolshilpa8a8s100% (1)
- Lab LCDDocument6 paginiLab LCDJesus Cotrina100% (1)
- In-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFDocument14 paginiIn-Circuit Serial Programming - Picmicro Mid-Range Mcu Family PDFMauro Vargas100% (2)
- UART Wishbone SpecDocument20 paginiUART Wishbone SpecSandeep Thakur100% (1)
- PS2® To Usb Mouse Translator Hardware DiagramDocument10 paginiPS2® To Usb Mouse Translator Hardware Diagramjhenriqueh100% (1)
- Complete Gas Sensor CircuitDocument9 paginiComplete Gas Sensor Circuitsethuraghul100% (1)
- Datasheet Sen23292pDocument15 paginiDatasheet Sen23292pjessie100% (1)
- AIS SchematicDocument6 paginiAIS SchematicKyai Sumirat Gludug Sinawang100% (4)
- Read Modify WriteDocument2 paginiRead Modify WriteMisbah UrRehman100% (1)
- LCD 2 X 8Document4 paginiLCD 2 X 8dek_war100% (1)
- Understanding I2C BusDocument8 paginiUnderstanding I2C BusMai Khoa100% (1)
- MicrocontrollersDocument14 paginiMicrocontrollersanshu4u06100% (1)
- The 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsDocument51 paginiThe 8051 Microcontroller and Embedded Systems: Motor Control: Relay, PWM, DC and Stepper MotorsAmAnDeepSingh100% (1)
- I2c CommunicationDocument9 paginiI2c CommunicationSanjay Sharma100% (2)
- Names of student: -Nguyễn Tiến Đức -Trần Hoàng Đăng Khoa Class: 16DTCLC1 Subject: Computer NetworkingDocument17 paginiNames of student: -Nguyễn Tiến Đức -Trần Hoàng Đăng Khoa Class: 16DTCLC1 Subject: Computer NetworkingAnonymous EAPWaVHfYp100% (1)
- Comparison of Communication ProtocolDocument2 paginiComparison of Communication Protocolvigneshwaran100% (2)
- Oscillators Module 02Document20 paginiOscillators Module 02ervaishu5342100% (1)
- LCD HandshakingDocument19 paginiLCD HandshakingNvskinId100% (1)
- Networking Tutorial - TCPIP Over EthernetDocument8 paginiNetworking Tutorial - TCPIP Over EthernetAbhilash V Pillai100% (24)
- Program LCDDocument2 paginiProgram LCDAngga Wijaya Kusuma100% (1)
- Lecture 7 - LCDDocument25 paginiLecture 7 - LCDSuhaib Abugdera100% (1)
- ICD2 Poster 51265hDocument1 paginăICD2 Poster 51265hngt881100% (1)
- Sound Sensor Module PDFDocument5 paginiSound Sensor Module PDFTrần Thảo Nguyên100% (1)
- A Brief Tutorial On GCC Inline AsmDocument10 paginiA Brief Tutorial On GCC Inline Asmxieyubo100% (3)
- Ultrasonic Distance Sensor PWM Output User ManualDocument9 paginiUltrasonic Distance Sensor PWM Output User Manualsahithi kolla100% (2)
- Bidirectional Current Source-TIDocument9 paginiBidirectional Current Source-TIestraj1954100% (1)
- Agribot Project PresentationDocument21 paginiAgribot Project Presentationumaiya1990100% (1)
- 5 2 X 16 Parallel LCD: 3.5.1 Technical SpecificationsDocument3 pagini5 2 X 16 Parallel LCD: 3.5.1 Technical SpecificationsManish Singh100% (1)
- Brushless DC Electric Motor Control by CPLDDocument6 paginiBrushless DC Electric Motor Control by CPLDIonela100% (3)
- DYP Serial Ultrasonic Sensor: FeaturesDocument2 paginiDYP Serial Ultrasonic Sensor: Featuresvenikiran100% (1)
- Serial WinDocument4 paginiSerial WinFrancisco Ochoa Bueno100% (1)
- Firebird VDocument6 paginiFirebird VPriyanshu Gupta100% (2)
- 001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Document57 pagini001-57294 AN57294 USB 101 An Introduction To Universal Serial Bus 2.0Arturo Picolin100% (1)
- Basics of The Communication ProtocolDocument19 paginiBasics of The Communication ProtocolNEETHU PRAKASHÎncă nu există evaluări
- Introduction To Spi CommunicationDocument5 paginiIntroduction To Spi Communicationjoyal jose100% (2)
- 1-Wire Is A Device Communications Bus System Designed by Dallas Semiconductor Corp. ThatDocument5 pagini1-Wire Is A Device Communications Bus System Designed by Dallas Semiconductor Corp. ThatrajeshÎncă nu există evaluări
- Uart, Spi & I2cDocument12 paginiUart, Spi & I2cdeepakacharya424Încă nu există evaluări
- Survey About I2C and SPI CommunicationDocument16 paginiSurvey About I2C and SPI Communicationtruongan15092002Încă nu există evaluări
- Pascal Die Casting Machine SystemDocument20 paginiPascal Die Casting Machine Systemenascimento32Încă nu există evaluări
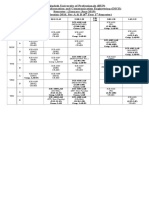
- Class Routine Final 13.12.18Document7 paginiClass Routine Final 13.12.18RakibÎncă nu există evaluări
- Summative Test in Foundation of Social StudiesDocument2 paginiSummative Test in Foundation of Social StudiesJane FajelÎncă nu există evaluări
- Harriet Tubman Lesson PlanDocument7 paginiHarriet Tubman Lesson PlanuarkgradstudentÎncă nu există evaluări
- Waste Foundry Sand and Its Leachate CharDocument10 paginiWaste Foundry Sand and Its Leachate CharJanak RaazzÎncă nu există evaluări
- تأثير العناصر الثقافية والبراغماتية الأسلوبية في ترجمة سورة الناس من القرآن الكريم إلى اللغة الإ PDFDocument36 paginiتأثير العناصر الثقافية والبراغماتية الأسلوبية في ترجمة سورة الناس من القرآن الكريم إلى اللغة الإ PDFSofiane DouifiÎncă nu există evaluări
- Paper Ed Mid TermDocument2 paginiPaper Ed Mid Termarun7sharma78Încă nu există evaluări
- 5 Grade: Daily MathDocument130 pagini5 Grade: Daily MathOLIVEEN WILKS-SCOTT100% (3)
- Practicewith Argument Athletesas ActivistsDocument30 paginiPracticewith Argument Athletesas ActivistsRob BrantÎncă nu există evaluări
- ALTS150-12P Datasheet1Document2 paginiALTS150-12P Datasheet1mamloveÎncă nu există evaluări
- Naca Duct RMDocument47 paginiNaca Duct RMGaurav GuptaÎncă nu există evaluări
- Void Engineers (Convention: Mage The Ascension)Document6 paginiVoid Engineers (Convention: Mage The Ascension)Beth0% (1)
- Storage Tanks Overfill Prevention Better PracticesDocument2 paginiStorage Tanks Overfill Prevention Better PracticesRicardo Bec100% (1)
- SemDocument583 paginiSemMaria SantosÎncă nu există evaluări
- Zgouras Catherine Team Together 1 Teachers BookDocument257 paginiZgouras Catherine Team Together 1 Teachers Booknata86% (7)
- Types of ComputersDocument7 paginiTypes of ComputersSyed Badshah YousafzaiÎncă nu există evaluări
- Biosynthesis and Characterization of Silica Nanoparticles From RiceDocument10 paginiBiosynthesis and Characterization of Silica Nanoparticles From Riceanon_432216275Încă nu există evaluări
- PCM 2.4l Turbo 5 de 5Document2 paginiPCM 2.4l Turbo 5 de 5Felix VelasquezÎncă nu există evaluări
- 1st Unseen Passage For Class 5 in EnglishDocument7 pagini1st Unseen Passage For Class 5 in EnglishVibhav SinghÎncă nu există evaluări
- A First Etymological Dictionary of BasquDocument29 paginiA First Etymological Dictionary of BasquDaily MailÎncă nu există evaluări
- Be and Words From The List.: 6B Judging by Appearance Listening and ReadingDocument3 paginiBe and Words From The List.: 6B Judging by Appearance Listening and ReadingVale MontoyaÎncă nu există evaluări
- Lub OIl Flushing Procedure PDFDocument44 paginiLub OIl Flushing Procedure PDFSubrahmanyam100% (1)
- The Technology Procurement HandbookDocument329 paginiThe Technology Procurement HandbookAlexander Jose Chacin NavarroÎncă nu există evaluări
- Human Development and Performance Throughout The Lifespan 2nd Edition Cronin Mandich Test BankDocument4 paginiHuman Development and Performance Throughout The Lifespan 2nd Edition Cronin Mandich Test Bankanne100% (28)
- Namagunga Primary Boarding School: Primary Six Holiday Work 2021 EnglishDocument10 paginiNamagunga Primary Boarding School: Primary Six Holiday Work 2021 EnglishMonydit santinoÎncă nu există evaluări
- Energy BodiesDocument1 paginăEnergy BodiesannoyingsporeÎncă nu există evaluări
- Drsent PT Practice Sba OspfDocument10 paginiDrsent PT Practice Sba OspfEnergyfellowÎncă nu există evaluări
- CUIT 201 Assignment3 March2023Document2 paginiCUIT 201 Assignment3 March2023crybert zinyamaÎncă nu există evaluări
- Hypothesis Testing Random MotorsDocument8 paginiHypothesis Testing Random MotorsLinn ArshadÎncă nu există evaluări
- 4 PDFDocument81 pagini4 PDFMohammad K. NassouraÎncă nu există evaluări