S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Art Lab For Little Kids - Susan Schwake PDFDocument146 paginiArt Lab For Little Kids - Susan Schwake PDFEmma Alfonzo67% (3)
- ABS Rules For Cable SizingDocument2 paginiABS Rules For Cable SizingMohammed JassimÎncă nu există evaluări
- Hemodynamic Monitoring in ICUDocument111 paginiHemodynamic Monitoring in ICUManjunath Gemini100% (2)
- 365-M - City Bus Route & Timings, Bangalore (BMTC) Map, First & Last BusDocument10 pagini365-M - City Bus Route & Timings, Bangalore (BMTC) Map, First & Last BusER Aditya DasÎncă nu există evaluări
- Flexowell® Replacement-Belts enDocument3 paginiFlexowell® Replacement-Belts enrererererererererereÎncă nu există evaluări
- MHFU Hunter RankDocument5 paginiMHFU Hunter RankGustin PrayogoÎncă nu există evaluări
- Abnormal Uterine Bleeding - Surgical ManagementDocument14 paginiAbnormal Uterine Bleeding - Surgical ManagementNikhil DevÎncă nu există evaluări
- Vortex 70Document92 paginiVortex 70MajazÎncă nu există evaluări
- CatalogDocument52 paginiCatalogtalabiraÎncă nu există evaluări
- ASI Hammer Injection Block ManualDocument16 paginiASI Hammer Injection Block ManualGerardo Manuel FloresÎncă nu există evaluări
- Jcpenney Roto Tiller Front in e ManualDocument34 paginiJcpenney Roto Tiller Front in e Manualcb4pdfs100% (2)
- T/PR/DIS/5.10.1: Work Procedure ForDocument38 paginiT/PR/DIS/5.10.1: Work Procedure ForAnant RubadeÎncă nu există evaluări
- Assay - Alumina and Magnesia Oral SuspensionDocument3 paginiAssay - Alumina and Magnesia Oral SuspensionmaimaiÎncă nu există evaluări
- The Past Is A Foreign Country-1.2Document25 paginiThe Past Is A Foreign Country-1.2Xinyu DongÎncă nu există evaluări
- Calibrating Images TutorialDocument14 paginiCalibrating Images TutorialtrujillomadrigalÎncă nu există evaluări
- STAN Statistika 12 PDFDocument25 paginiSTAN Statistika 12 PDFPembelajaran Jarak JauhÎncă nu există evaluări
- Compressed Air Pressure Drop DiagramDocument4 paginiCompressed Air Pressure Drop DiagramycemalÎncă nu există evaluări
- Measuring Salinity in Crude Oils Evaluation of MetDocument9 paginiMeasuring Salinity in Crude Oils Evaluation of Metarmando fuentesÎncă nu există evaluări
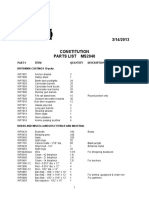
- MS2040 Constitution Parts ListDocument6 paginiMS2040 Constitution Parts ListTemptationÎncă nu există evaluări
- Aspirating Smoke Detector: Technical DescriptionDocument115 paginiAspirating Smoke Detector: Technical DescriptionSecuriton ArgentinaÎncă nu există evaluări
- Parasites in Reptile PDFDocument21 paginiParasites in Reptile PDFRamadhani SyafitriÎncă nu există evaluări
- Scan&SolveDocument24 paginiScan&SolveAtul ChauhanÎncă nu există evaluări
- An Automated Energy Meter Reading System Using GSM TechnologyDocument8 paginiAn Automated Energy Meter Reading System Using GSM TechnologyBarÎncă nu există evaluări
- Kelvin Hughes LTD: Technical Advice SheetDocument7 paginiKelvin Hughes LTD: Technical Advice SheetVladymirÎncă nu există evaluări
- CP Lithium Ion BatteriesDocument4 paginiCP Lithium Ion BatteriesvaseemalikhanÎncă nu există evaluări
- Manuel Alava 01-12-10 PLDocument3 paginiManuel Alava 01-12-10 PLAshley RodriguezÎncă nu există evaluări
- At Your Service: Affordable LandscapingDocument1 paginăAt Your Service: Affordable LandscapingDamaris HigginsÎncă nu există evaluări
- SCSM 2022 Runners Information GuideDocument36 paginiSCSM 2022 Runners Information GuideDollar SurvivorÎncă nu există evaluări
- Van Pham Tieng Anh Co Ban Nang CaoDocument18 paginiVan Pham Tieng Anh Co Ban Nang CaoookuroooÎncă nu există evaluări
- StringTokenizer in JavaDocument11 paginiStringTokenizer in JavaNeha saxena Neha saxenaÎncă nu există evaluări