S-ar putea să vă placă și
- Control Digital Taller 1Document3 paginiControl Digital Taller 1Omar David Peña IbarraÎncă nu există evaluări
- Taller1 de Sistemas de Control DigitalDocument3 paginiTaller1 de Sistemas de Control DigitalLU PAÎncă nu există evaluări
- Función de Transferencia de Un Motor DCDocument3 paginiFunción de Transferencia de Un Motor DCAndrés BonillaÎncă nu există evaluări
- Exámenes Control2Document7 paginiExámenes Control2Hugo Quezada AlegríaÎncă nu există evaluări
- Apuntes CD 2014-2014 Ver1Document113 paginiApuntes CD 2014-2014 Ver1Torres Marroquin RicardoÎncă nu există evaluări
- Proyecto Transistor BJTDocument2 paginiProyecto Transistor BJTJhoan JoaquiÎncă nu există evaluări
- Material Tratamiento Digital Senales Semana 3Document114 paginiMaterial Tratamiento Digital Senales Semana 3Ricardo D. Alca MejiaÎncă nu există evaluări
- Diseño de Controladores Digitales - DeadbeatDocument8 paginiDiseño de Controladores Digitales - DeadbeatFelipe MoreraÎncă nu există evaluări
- Señales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDocument73 paginiSeñales y Sistemas de Comunicación Analógica y Digital - Manual de SolucionesDcuevase1Încă nu există evaluări
- Estimacion de EstadosDocument8 paginiEstimacion de EstadosrogeliochcÎncă nu există evaluări
- Práctica 1 Control 2Document19 paginiPráctica 1 Control 2Francisco ArredondoÎncă nu există evaluări
- Informe Lab #3Document11 paginiInforme Lab #3Osman SFÎncă nu există evaluări
- Taller2 PDFDocument18 paginiTaller2 PDFEstebanParradoÎncă nu există evaluări
- Lab3 CONTROL DIGTAL 2020ADocument3 paginiLab3 CONTROL DIGTAL 2020ACésar Jesús AlcaláÎncă nu există evaluări
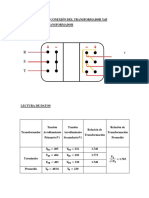
- Matlab Resolver Transformadores de 175 KvaDocument2 paginiMatlab Resolver Transformadores de 175 KvaDarruel Castellón AcevedoÎncă nu există evaluări
- Informe Final 1 Maquinas ElectricasDocument23 paginiInforme Final 1 Maquinas ElectricasMiguel Angel Sucso0% (1)
- Manual Atp Draw 201-Apendice EsDocument68 paginiManual Atp Draw 201-Apendice Esalejandro palomo ballestaÎncă nu există evaluări
- Regulador de TensiónDocument8 paginiRegulador de TensiónPaúl Adán Serna TorreÎncă nu există evaluări
- Problema de Sistemas en Variable de EstadoDocument4 paginiProblema de Sistemas en Variable de EstadoDiego Jose Cueto GutierrezÎncă nu există evaluări
- Problemas Electronica de PotenciaDocument1 paginăProblemas Electronica de PotenciaBenjamin Samaniego ErazoÎncă nu există evaluări
- Tarea 1 SDC 2015Document22 paginiTarea 1 SDC 2015Salvador Gallardo100% (1)
- Tarea 5 CamposssssssssssssssDocument5 paginiTarea 5 CamposssssssssssssssCécil CalleÎncă nu există evaluări
- Problemas Propuestos 2018-2Document4 paginiProblemas Propuestos 2018-2Jhoelito KennedyÎncă nu există evaluări
- Circuitos de Primer Orden - TEORIADocument11 paginiCircuitos de Primer Orden - TEORIAalexandraÎncă nu există evaluări
- Labo 2 ControlDocument7 paginiLabo 2 ControlFreddyGutierrezÎncă nu există evaluări
- Cuestionario 5 PDFDocument9 paginiCuestionario 5 PDFAdriana RomerÎncă nu există evaluări
- Prueba de Corto Circuito - Perdidas en El CobreDocument7 paginiPrueba de Corto Circuito - Perdidas en El CobreYuler Eugenio MamaniÎncă nu există evaluări
- Analisis JfetDocument56 paginiAnalisis JfetJoe Herrera AriramaÎncă nu există evaluări
- Informe Final Diseño de ContadoresDocument16 paginiInforme Final Diseño de ContadoresAlex SevillaÎncă nu există evaluări
- PracticaDocument2 paginiPracticaoscar paezÎncă nu există evaluări
- Ma3002 Transformada Z EjemplosDocument11 paginiMa3002 Transformada Z EjemplosJHON TAYLOR USMA HURTADOÎncă nu există evaluări
- Diseño de Lazoz Pid Por Polos y CerosDocument19 paginiDiseño de Lazoz Pid Por Polos y Cerosavengers vengadorÎncă nu există evaluări
- Peña Vargas Elissa, CORRECCION de Conversion de Señal Analogica DigitalDocument13 paginiPeña Vargas Elissa, CORRECCION de Conversion de Señal Analogica DigitalJulian PeñaÎncă nu există evaluări
- Sistemas LTI en Espacio de EstadoDocument26 paginiSistemas LTI en Espacio de EstadoRuben VelazquezÎncă nu există evaluări
- Laboratorio 3 Electronica de Potencia 1Document13 paginiLaboratorio 3 Electronica de Potencia 1Manuel GonzalezÎncă nu există evaluări
- Fallas de SEP Ejemplo 6Document8 paginiFallas de SEP Ejemplo 6Santiago Xavier Espinel100% (1)
- Practica3. Retrolimentación Negativa en El Amplificador OperacionalDocument3 paginiPractica3. Retrolimentación Negativa en El Amplificador OperacionalLuis Gerardo Escobedo PinalÎncă nu există evaluări
- SCR PDFDocument50 paginiSCR PDFJuan Carlos VegaÎncă nu există evaluări
- Corrimiento Del Neutro PDFDocument5 paginiCorrimiento Del Neutro PDFSebastian MÎncă nu există evaluări
- Circuitos RectificadoresDocument89 paginiCircuitos RectificadoresMaria Lucia Ospina Sepulveda100% (1)
- Prac 7Document3 paginiPrac 7badurock7Încă nu există evaluări
- Problemas SimuladosDocument6 paginiProblemas SimuladosRaúl Dylan CapchaÎncă nu există evaluări
- 17 Dispositivos de Disparo Ujt y PutDocument9 pagini17 Dispositivos de Disparo Ujt y PutRicardo LopezÎncă nu există evaluări
- Seguimiento de Objetos de Colores Con Webcam en MatlabDocument12 paginiSeguimiento de Objetos de Colores Con Webcam en MatlabSayuriAlexandraHerenciaMonrroyÎncă nu există evaluări
- Ejercicios de DecodificadoresDocument3 paginiEjercicios de DecodificadoresJHn Hnry Lzcn YpzÎncă nu există evaluări
- Tarea 34. Transitorio de Un Circuito en Serie RL Utilizando ATPDocument9 paginiTarea 34. Transitorio de Un Circuito en Serie RL Utilizando ATPdmdgvoÎncă nu există evaluări
- 013 MH Tema13 - TURBINAS-Semejanza Curvas de ExplotacionDocument13 pagini013 MH Tema13 - TURBINAS-Semejanza Curvas de ExplotacionAldo Javier GalicÎncă nu există evaluări
- Señales en Tiempo DiscretoDocument12 paginiSeñales en Tiempo DiscretoJosé ZambranoÎncă nu există evaluări
- GRUPO 6 LAB 2 Sist Control II Diseño Controladores LGRDocument14 paginiGRUPO 6 LAB 2 Sist Control II Diseño Controladores LGRQuino B. JeffryÎncă nu există evaluări
- Circuitos EquipoDocument67 paginiCircuitos EquipoKaren AlejandraÎncă nu există evaluări
- Tarea03 SDI215 2017Document18 paginiTarea03 SDI215 2017Walter CruzÎncă nu există evaluări
- Parcial Electronica de PotenciaDocument1 paginăParcial Electronica de PotenciaDiegoAldemarÎncă nu există evaluări
- Informe Circuitos MatlabDocument3 paginiInforme Circuitos MatlabJey Rincon ContrerasÎncă nu există evaluări
- Guia 9Document6 paginiGuia 9Hugo CarhuallanquiÎncă nu există evaluări
- Miscelánea U3 - CDDocument3 paginiMiscelánea U3 - CDsantiago pablo albertoÎncă nu există evaluări
- Problemas Propuestos de Control DigitalDocument3 paginiProblemas Propuestos de Control DigitalMarco SantiagoÎncă nu există evaluări
- Examen Parcial 2018A-CD SolucionarioDocument3 paginiExamen Parcial 2018A-CD SolucionarioYosimar Enoki RojasÎncă nu există evaluări
- Trabajo de Legislacion - Robert Mauricio Castilla Cruz - Jose Daniel Mora EsquivelDocument9 paginiTrabajo de Legislacion - Robert Mauricio Castilla Cruz - Jose Daniel Mora EsquivelOmar David Peña IbarraÎncă nu există evaluări
- LEY 842 DE 2003 TRABAJO ESTUDIANTES Nicolás Teobaldo Charry Díaz - Jesús David Ortiz Chinchilla PDFDocument5 paginiLEY 842 DE 2003 TRABAJO ESTUDIANTES Nicolás Teobaldo Charry Díaz - Jesús David Ortiz Chinchilla PDFOmar David Peña IbarraÎncă nu există evaluări
- Informe PrevioDocument16 paginiInforme PrevioOmar David Peña IbarraÎncă nu există evaluări
- Practicas Control DigitalDocument30 paginiPracticas Control DigitalOmar David Peña IbarraÎncă nu există evaluări
- GuiandenaprendizajenRAP2 385f12aca35d269 PDFDocument9 paginiGuiandenaprendizajenRAP2 385f12aca35d269 PDFOmar David Peña IbarraÎncă nu există evaluări
- Jinnamar Daza MartínezDocument9 paginiJinnamar Daza MartínezOmar David Peña IbarraÎncă nu există evaluări
- Desarrollo EIYM MaestroDocument13 paginiDesarrollo EIYM MaestroOmar David Peña IbarraÎncă nu există evaluări
- Luisa FlorezDocument9 paginiLuisa FlorezOmar David Peña IbarraÎncă nu există evaluări
- Aneurisma CerebralDocument10 paginiAneurisma CerebralGary ReaÎncă nu există evaluări
- Definición de ComunicaciónDocument11 paginiDefinición de ComunicaciónEmmar QuijadaÎncă nu există evaluări
- DeberDocument8 paginiDeberAlexander Alvarado0% (1)
- Perfil Proyecto Adquisición de Neumáticos - No Catalogados - Poa 2022Document7 paginiPerfil Proyecto Adquisición de Neumáticos - No Catalogados - Poa 2022ROY MAIGUASCAÎncă nu există evaluări
- 1 A1 - Máquinas Simples de IzajeDocument33 pagini1 A1 - Máquinas Simples de IzajeernestolavÎncă nu există evaluări
- Reflexiones Pedagogicas en Torn - ESPINOSA, Yuderkys Et AlDocument39 paginiReflexiones Pedagogicas en Torn - ESPINOSA, Yuderkys Et AlnamelessvampÎncă nu există evaluări
- Revista Psicología PDFDocument50 paginiRevista Psicología PDFManlio Soto PaizÎncă nu există evaluări
- Carlos Bandera - Taller Propiedades y Caracteristicas OrganolepticasDocument4 paginiCarlos Bandera - Taller Propiedades y Caracteristicas OrganolepticasLAURA CAROLINA RIOS ARROYOÎncă nu există evaluări
- Evaluación Tercer Periodo6 BiologiaDocument3 paginiEvaluación Tercer Periodo6 BiologiaJhon LopezÎncă nu există evaluări
- BIOETICA Y DERECHOS DE LOS PACIENTES Y CIRUJANOS DENTISTAS - DecálogoDocument3 paginiBIOETICA Y DERECHOS DE LOS PACIENTES Y CIRUJANOS DENTISTAS - Decálogonasya hernandezÎncă nu există evaluări
- Enfermeria Neonatal 9 Final 4Document28 paginiEnfermeria Neonatal 9 Final 4Miguel Angel Trucios QuispeÎncă nu există evaluări
- Valores Normales de LaboratorioDocument4 paginiValores Normales de LaboratorioMelanieÎncă nu există evaluări
- Ada1 Fundamentos - PadmanDocument3 paginiAda1 Fundamentos - PadmanAkari Tuz GarcíaÎncă nu există evaluări
- Orina - Soy LaboDocument49 paginiOrina - Soy LaboMelania MontiÎncă nu există evaluări
- Bourdieu y PasseronDocument27 paginiBourdieu y PasseronnoeliaÎncă nu există evaluări
- Ejemplos de Presupuestos de Una Empresa.Document11 paginiEjemplos de Presupuestos de Una Empresa.Edgar Najera RamirezÎncă nu există evaluări
- Reporte de Medicina - A-2020Document2 paginiReporte de Medicina - A-2020Joan ZambranoÎncă nu există evaluări
- ECP DPY P MMGP 001 Modelo de Maduracion y Gestion de Proyectos PDFDocument122 paginiECP DPY P MMGP 001 Modelo de Maduracion y Gestion de Proyectos PDFfabian0% (1)
- Practica de 20 Puntos Johanny Altagracia PérezDocument6 paginiPractica de 20 Puntos Johanny Altagracia PérezGabriel AvilaÎncă nu există evaluări
- Intensivo 2Document37 paginiIntensivo 2Abu PSÎncă nu există evaluări
- Qué Es La Disciplina PositivaDocument8 paginiQué Es La Disciplina PositivaENTEPENSANTEÎncă nu există evaluări
- De Profundis Clamavi Ad Te Domine - LibrerantesDocument12 paginiDe Profundis Clamavi Ad Te Domine - LibreranteszentropiaÎncă nu există evaluări
- Sise Logistica 03Document21 paginiSise Logistica 03Cesar Francisco Alvaro RodriguezÎncă nu există evaluări
- Distribución de Las Riquezas en EcuadorDocument2 paginiDistribución de Las Riquezas en EcuadorSebas 03Încă nu există evaluări
- Practica 5Document7 paginiPractica 5Milton Martinez AvilèsÎncă nu există evaluări
- CAUCHING y Trabajo en EquipoDocument40 paginiCAUCHING y Trabajo en EquipoJose Smith CalisayaÎncă nu există evaluări
- Lluvia de IdeasDocument13 paginiLluvia de IdeasJohnMires100% (1)
- HIDROGENODocument24 paginiHIDROGENOtonyÎncă nu există evaluări
- Probabilidad y EstadisticaDocument4 paginiProbabilidad y EstadisticaLisi ReyesÎncă nu există evaluări
- Complicaciones Fracturas SupracondileasDocument22 paginiComplicaciones Fracturas SupracondileasDavid CamposÎncă nu există evaluări