S-ar putea să vă placă și
- Sharp Aquos 40-Inch HDTV LCD User ManualDocument32 paginiSharp Aquos 40-Inch HDTV LCD User ManualoneoftheworstÎncă nu există evaluări
- Knots (Notes)Document22 paginiKnots (Notes)OPSS NPCC91% (11)
- Wa420-1 S - N 10001-Up - Steering Demand Valve (#20001-)Document2 paginiWa420-1 S - N 10001-Up - Steering Demand Valve (#20001-)Lenin GullapalliÎncă nu există evaluări
- Service Genie S60 4414Document251 paginiService Genie S60 4414Ars Javi Ambrosi100% (1)
- 2ME705-4-Hydraulic and Pneumatic SystemsDocument2 pagini2ME705-4-Hydraulic and Pneumatic SystemsDev Chauhan100% (1)
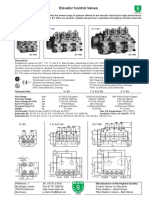
- Elevator Control Valves: EN ISO 9001Document6 paginiElevator Control Valves: EN ISO 9001Jibjab7Încă nu există evaluări
- Steering System Repair ManualDocument13 paginiSteering System Repair Manualsample nameÎncă nu există evaluări
- Dynamic Acera: WT HP BKT CapDocument8 paginiDynamic Acera: WT HP BKT CapSilviaMoreno0% (1)
- ODBII CodesDocument31 paginiODBII CodesOmar Tavarez50% (2)
- 315 DLDocument16 pagini315 DLJose nildo lobato Mendes MendesÎncă nu există evaluări
- Injector Installation 107 EngineDocument5 paginiInjector Installation 107 EnginevalterripÎncă nu există evaluări
- Using Caterpillar Monitoring SystemDocument6 paginiUsing Caterpillar Monitoring SystemClaudionorGomesFilhoÎncă nu există evaluări
- JFE HitenDocument19 paginiJFE HitenPandu PhintaruÎncă nu există evaluări
- Hyundai Etacs JM - Etacs PDFDocument26 paginiHyundai Etacs JM - Etacs PDFlartsim115100% (1)
- Kawasaki MCV Boom Oil ReturnDocument2 paginiKawasaki MCV Boom Oil ReturnJorge RojasÎncă nu există evaluări
- Section EDocument110 paginiSection Ebaracuss323iÎncă nu există evaluări
- EU 22 Balduzzi Abusing CNC TechnologiesDocument47 paginiEU 22 Balduzzi Abusing CNC TechnologiesHenrik Dalhof JensenÎncă nu există evaluări
- 1747-L40C PLC To PC Communication ManualDocument42 pagini1747-L40C PLC To PC Communication Manualrapozaazul100% (1)
- SE220LCDocument2 paginiSE220LCAriel Quezada100% (1)
- Im Inst I0310en GB01Document7 paginiIm Inst I0310en GB01Chris McGirr50% (2)
- Excavator PC 75Document18 paginiExcavator PC 75VickyÎncă nu există evaluări
- 000 All ChaptersDocument277 pagini000 All ChaptersDaniel Zapata Zuluaga100% (1)
- Self Inflating Tyres ReportDocument26 paginiSelf Inflating Tyres ReportDebasish Padhy100% (5)
- Robin Subaru Ec12 PDFDocument66 paginiRobin Subaru Ec12 PDFStan Marius VictorÎncă nu există evaluări
- Atkinson CycleDocument49 paginiAtkinson CycleLatoya KennedyÎncă nu există evaluări
- H2 Change Operating Pattern-1 PDFDocument6 paginiH2 Change Operating Pattern-1 PDFgibran jimenez100% (1)
- GTH-4013 EX GTH-4017 EX: Serial Number RangeDocument234 paginiGTH-4013 EX GTH-4017 EX: Serial Number Rangejonny david martinez perezÎncă nu există evaluări
- Hitachi P50H401 Service ManualDocument139 paginiHitachi P50H401 Service ManualMoto0524Încă nu există evaluări
- Fuel Injection SystemsDocument17 paginiFuel Injection Systemsअभिषेक ओझा100% (1)
- 12H Frein TestDocument13 pagini12H Frein TestaniriÎncă nu există evaluări
- Hyundai Santa FE (2005-2007) Workshop Manual - Clutch SystemDocument12 paginiHyundai Santa FE (2005-2007) Workshop Manual - Clutch SystemJenny Mora LeonÎncă nu există evaluări
- Bucket Hydraulic System: Operación de SistemasDocument4 paginiBucket Hydraulic System: Operación de SistemasvidalÎncă nu există evaluări
- Excavator: Inspection Before Engine StartDocument2 paginiExcavator: Inspection Before Engine StartAkbarÎncă nu există evaluări
- Re92105 2003-11Document32 paginiRe92105 2003-11Madhu RajagopalanÎncă nu există evaluări
- Diagnostic Codes: MitsubishiDocument12 paginiDiagnostic Codes: Mitsubishiน้องกอย่า วงศ์เครือÎncă nu există evaluări
- Robin h17Document83 paginiRobin h17mihai37Încă nu există evaluări
- 6sded We 0229TH PDFDocument223 pagini6sded We 0229TH PDFAndres Miguel Cevallos GarciaÎncă nu există evaluări
- SM PC200-8M1 - Lepbp20703Document1.565 paginiSM PC200-8M1 - Lepbp20703Rizky HakimÎncă nu există evaluări
- 11 Lubrication (502-526) PDFDocument26 pagini11 Lubrication (502-526) PDFriad100% (1)
- ILN2003A High-Voltage High-Current Darlington Transistor ArraysDocument8 paginiILN2003A High-Voltage High-Current Darlington Transistor ArraysAnonymous NSvuLOX10PÎncă nu există evaluări
- Difference Between: Turbocharger Vs SuperchargerDocument14 paginiDifference Between: Turbocharger Vs SuperchargerMohammad Al QadomeÎncă nu există evaluări
- Nissan DTC P0171Document7 paginiNissan DTC P0171pakiturbo2papelesÎncă nu există evaluări
- IP2312 English VersionDocument11 paginiIP2312 English VersionWawan ArisÎncă nu există evaluări
- SK 200 Lodging ManualDocument162 paginiSK 200 Lodging ManualEak MachineryÎncă nu există evaluări
- 570T Parts CatalogDocument690 pagini570T Parts CatalogMOTOR POOLÎncă nu există evaluări
- KOmasthu PC450 - 450LC-8 PDFDocument24 paginiKOmasthu PC450 - 450LC-8 PDFPritiranjan SinghÎncă nu există evaluări
- Manual EP100 enDocument23 paginiManual EP100 enEBÎncă nu există evaluări
- Lidos Lwe Webservice: LTM 1120-1-015 Z23358 Z23358 927940923Document1 paginăLidos Lwe Webservice: LTM 1120-1-015 Z23358 Z23358 927940923mohamedÎncă nu există evaluări
- Appendix Electric Schematic Diagram of The Complete CarDocument4 paginiAppendix Electric Schematic Diagram of The Complete CarJonathan NuñezÎncă nu există evaluări
- EADocument14 paginiEAanggieÎncă nu există evaluări
- PDS390S-4B1, Hal 29Document4 paginiPDS390S-4B1, Hal 29AkmalÎncă nu există evaluări
- Manual Start Deep Sea Electronics: Features DescriptionDocument2 paginiManual Start Deep Sea Electronics: Features Descriptionabduallah muhammadÎncă nu există evaluări
- Howo, D10 Euro-IIIDocument38 paginiHowo, D10 Euro-IIIyb7knvÎncă nu există evaluări
- Special ToolsDocument24 paginiSpecial ToolsSuka MuttAstroÎncă nu există evaluări
- Ficha Tecnica Lishide Escavadora Lishide SC220-8 - 1081Document3 paginiFicha Tecnica Lishide Escavadora Lishide SC220-8 - 1081PABLO HERNAN PRADA MONCADAÎncă nu există evaluări
- Chapter 3Document31 paginiChapter 3tekitech443Încă nu există evaluări
- Lecture 17Document16 paginiLecture 17NEELIMAÎncă nu există evaluări
- Combined PDFDocument22 paginiCombined PDFThafer MajeedÎncă nu există evaluări
- CH 5-Hydraulic Circuit Design and AnalysisDocument39 paginiCH 5-Hydraulic Circuit Design and AnalysisSami Onur VuralÎncă nu există evaluări
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGDe la EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGÎncă nu există evaluări
- Automation of Die Cutting MachineDocument34 paginiAutomation of Die Cutting Machinesyed ebadÎncă nu există evaluări
- Dosificadora EVODocument4 paginiDosificadora EVOCentury_1962Încă nu există evaluări
- 3221 PU 005 - 3223 PU 007 - 200MR4 5100X2100 - Rev3 - 2 PDFDocument95 pagini3221 PU 005 - 3223 PU 007 - 200MR4 5100X2100 - Rev3 - 2 PDFFredi Negron100% (1)
- Hydraulic Fracture Treatment Design & ExecutionDocument23 paginiHydraulic Fracture Treatment Design & ExecutionAndre YudhistiraÎncă nu există evaluări
- Chapter 3Document17 paginiChapter 3mohamedbadawyÎncă nu există evaluări
- Dialogue-Understanding English On Board ShipDocument6 paginiDialogue-Understanding English On Board ShipSadewa WisnuÎncă nu există evaluări
- Centrifugal Pump ExperimentsDocument18 paginiCentrifugal Pump ExperimentssamadonyÎncă nu există evaluări
- Constant To Variable Flow TransformationDocument12 paginiConstant To Variable Flow TransformationbatazivoÎncă nu există evaluări
- EB8870Document2 paginiEB8870Miguel RojasÎncă nu există evaluări
- Pompeavide Leybold SV 300 YOM 2005Document100 paginiPompeavide Leybold SV 300 YOM 2005EOLOS COMPRESSORS LTDÎncă nu există evaluări
- Manitowoc 8500-1 Parts Manual PDFDocument1.046 paginiManitowoc 8500-1 Parts Manual PDFnamduong368100% (1)
- Ads WipcDocument316 paginiAds WipcTimothy Thompson100% (5)
- Catalogo Varisco Ver0805 Rev05 (Eng)Document8 paginiCatalogo Varisco Ver0805 Rev05 (Eng)mavhe00Încă nu există evaluări
- Aerator Type ABS Venturi Jet: ApplicationsDocument4 paginiAerator Type ABS Venturi Jet: ApplicationsRafael ZimmermannÎncă nu există evaluări
- CFD For PCPDocument9 paginiCFD For PCPJarmo MendezÎncă nu există evaluări
- How To Read P&IDDocument27 paginiHow To Read P&IDRakesh Ranjan100% (3)
- Retrieving Fault Codes Fault Code Display: A B CD E A CDocument19 paginiRetrieving Fault Codes Fault Code Display: A B CD E A CPabloMatiasC100% (2)
- 3MDocument46 pagini3Mgonzales030189Încă nu există evaluări
- Grove GMK5175 175t Data PDFDocument21 paginiGrove GMK5175 175t Data PDFzae nurdin100% (1)
- MANUAL Vdocuments - Site FG Wilson P88e1Document287 paginiMANUAL Vdocuments - Site FG Wilson P88e1eletronica55100% (2)
- BHEL Turbine Start-UpDocument17 paginiBHEL Turbine Start-UpSelvakumar SubramanianÎncă nu există evaluări
- Catalog of 150 CDocument6 paginiCatalog of 150 CJorge Barradas OsornoÎncă nu există evaluări
- Documents - Pub - New Holland t8030 Tractor Service Repair Manual 1Document18 paginiDocuments - Pub - New Holland t8030 Tractor Service Repair Manual 1Luisg GoldenbergÎncă nu există evaluări
- Centrifugal Compressor Operation and MaintenanceDocument10 paginiCentrifugal Compressor Operation and MaintenanceiJordanScribdÎncă nu există evaluări
- Lot-01-WWTP-01 System PresentationDocument44 paginiLot-01-WWTP-01 System PresentationMesfinÎncă nu există evaluări
- E2902 5 03 15 - Pumpen UebersichtDocument20 paginiE2902 5 03 15 - Pumpen Uebersichtsujan723Încă nu există evaluări
- Dynamic PumpsDocument7 paginiDynamic PumpsBAZIL KHANÎncă nu există evaluări
- Pursanova IXC ManualDocument16 paginiPursanova IXC ManualHector Serrano MagañaÎncă nu există evaluări
- Deutz 226B Operation ManualDocument58 paginiDeutz 226B Operation ManualThanh Secondheart84% (32)
- Grundfos Titanium Pumps: Titanium - Breaking New GroundDocument2 paginiGrundfos Titanium Pumps: Titanium - Breaking New GroundMarkqshot JaladaraÎncă nu există evaluări