S-ar putea să vă placă și
- Presentation On Actuators: Prepared By: Shivi Varshney ME (I&C) Regular 2017Document26 paginiPresentation On Actuators: Prepared By: Shivi Varshney ME (I&C) Regular 2017Shivi VarshneyÎncă nu există evaluări
- Presentation 4actuation System For MechatronicsDocument62 paginiPresentation 4actuation System For MechatronicswabdushukurÎncă nu există evaluări
- CH - 1 Introduction To Pneumatics and Hydraulics SystemDocument60 paginiCH - 1 Introduction To Pneumatics and Hydraulics SystemEyasu demsewÎncă nu există evaluări
- Hydraulic Powerpack 2Document58 paginiHydraulic Powerpack 2Kushana Saikirann100% (2)
- Lecture Three Actuators ObjectivesDocument5 paginiLecture Three Actuators ObjectivesKenani SaningaÎncă nu există evaluări
- Air Compressor Using Crank and Slotted Link MechanismDocument22 paginiAir Compressor Using Crank and Slotted Link MechanismSaravanan Viswakarma75% (4)
- Disk BrakeDocument8 paginiDisk Brakevivek sharmaÎncă nu există evaluări
- Mechanics of Machines For Eie (1588)Document9 paginiMechanics of Machines For Eie (1588)GODFREYÎncă nu există evaluări
- Chapter 1introduction of Fluid PowerDocument10 paginiChapter 1introduction of Fluid PowerBassant FadelÎncă nu există evaluări
- Hydraulic Systems: Hydraulic Mechanism of Acme Cutting MachineDocument21 paginiHydraulic Systems: Hydraulic Mechanism of Acme Cutting MachineSantha PriyaÎncă nu există evaluări
- Fluid Power DME 6TH SEMDocument58 paginiFluid Power DME 6TH SEMAman Ahmed MokamiÎncă nu există evaluări
- TRN4507 2.2Document41 paginiTRN4507 2.2cyruswan156Încă nu există evaluări
- Hydraulic Drive System - WikipediaDocument20 paginiHydraulic Drive System - WikipediaLAliÎncă nu există evaluări
- Chapter 5Document39 paginiChapter 5Pink FloydaÎncă nu există evaluări
- Actuation SystemDocument11 paginiActuation SystemNavendu GuptaÎncă nu există evaluări
- Control EngineeringDocument83 paginiControl EngineeringAbdulmajid AbusittaÎncă nu există evaluări
- ActuatorDocument42 paginiActuatorNyandaMadili MalashiÎncă nu există evaluări
- Chapter 2 Hydraulic Actuators L2Document48 paginiChapter 2 Hydraulic Actuators L2kidus tsegayeÎncă nu există evaluări
- JSS3 Scheme of WorkDocument5 paginiJSS3 Scheme of WorkAbdullateef Adedoyin0% (1)
- CHAPTER THREE ACTUATOR InterfacingDocument40 paginiCHAPTER THREE ACTUATOR InterfacingdanielÎncă nu există evaluări
- Mining Machinery: Department of Mechanical Engineering Aditya Engineering CollegeDocument35 paginiMining Machinery: Department of Mechanical Engineering Aditya Engineering CollegeRAJESH SAHÎncă nu există evaluări
- 10 Mechanical Design HL ExtensionDocument38 pagini10 Mechanical Design HL ExtensionSyeda Fariya Nisar AliÎncă nu există evaluări
- Hydraulic Drive SystemDocument21 paginiHydraulic Drive SystemAnkit SrivastavaÎncă nu există evaluări
- UNIT 1. Introduction To KOM PDFDocument40 paginiUNIT 1. Introduction To KOM PDFAravind MuddebihalÎncă nu există evaluări
- Module 1 - MechanismsDocument41 paginiModule 1 - MechanismsB03Kavya MÎncă nu există evaluări
- Final Term Paper of DomDocument12 paginiFinal Term Paper of DomAvinash RajputÎncă nu există evaluări
- Topic 3-Steering - Part1Document27 paginiTopic 3-Steering - Part1TasmiaH.Shoily100% (1)
- Hydraulic Drive SystemDocument6 paginiHydraulic Drive Systemyamnul khairÎncă nu există evaluări
- Automation & Robotics (RME078) : Lecture Notes OnDocument10 paginiAutomation & Robotics (RME078) : Lecture Notes Onمقدس ألم Μυφυαδδας ΑιαΜÎncă nu există evaluări
- Springs Can Be Classified Depending On How The Load Force Is Applied To ThemDocument3 paginiSprings Can Be Classified Depending On How The Load Force Is Applied To ThemZaideAgirÎncă nu există evaluări
- (123doc) Thuy Luc Tren May BayDocument50 pagini(123doc) Thuy Luc Tren May Bayty3919883665Încă nu există evaluări
- Lab Manual For Kinematics of MachinesDocument18 paginiLab Manual For Kinematics of Machinesshailendra_236Încă nu există evaluări
- Chapter 2 - TwoDocument40 paginiChapter 2 - TwoKibrom MenasboÎncă nu există evaluări
- TOM Exp.Document9 paginiTOM Exp.Aneesh KumarÎncă nu există evaluări
- Mechanics of Machines Part 1Document27 paginiMechanics of Machines Part 1kimosave99Încă nu există evaluări
- Mechatronics: Actuation Systems For MechatronicsDocument120 paginiMechatronics: Actuation Systems For MechatronicsEyob EyobÎncă nu există evaluări
- Tutorial 3 19BME069Document14 paginiTutorial 3 19BME06920BME005 INAM SABRIÎncă nu există evaluări
- FLUIDS POWER SLIDES Chapter6Document40 paginiFLUIDS POWER SLIDES Chapter6Kapil KaviÎncă nu există evaluări
- Mechatronics Notes Unit 2Document20 paginiMechatronics Notes Unit 2alagarsmeÎncă nu există evaluări
- Hydraulic and Pneumatic Actuators and Their Application AreasDocument24 paginiHydraulic and Pneumatic Actuators and Their Application AreasKart01Încă nu există evaluări
- Hydraulic and Pneumatic Actuators and Their ApplicationDocument24 paginiHydraulic and Pneumatic Actuators and Their ApplicationsarkrassÎncă nu există evaluări
- Mechanical Actuation SystemDocument34 paginiMechanical Actuation Systemdildar123100% (2)
- Kinematics of Machinery NotesDocument25 paginiKinematics of Machinery Notesnishanth87Încă nu există evaluări
- Chapter 4 Â LT and Sheet 4 - Actuators and DrivesDocument8 paginiChapter 4 Â LT and Sheet 4 - Actuators and DrivesHossam Mohamed Ahmed ahmedÎncă nu există evaluări
- Steer 2Document3 paginiSteer 2Neldor A. MosquiteÎncă nu există evaluări
- Lecture II-Agricultural Operations and MachineryDocument131 paginiLecture II-Agricultural Operations and MachineryChileshe SimonÎncă nu există evaluări
- Lesson 1 - Steering Control SystemDocument25 paginiLesson 1 - Steering Control SystemAsaelion Wre100% (1)
- SICC AGRICULTURAL ENGINEERING M3 Converted AutosavedDocument44 paginiSICC AGRICULTURAL ENGINEERING M3 Converted AutosavedShanelle FuentesÎncă nu există evaluări
- System Development For Hydraulic Tilt Actuation of A Tilting Narrow VehicleDocument14 paginiSystem Development For Hydraulic Tilt Actuation of A Tilting Narrow VehicleMayur Prakash JagtapÎncă nu există evaluări
- ME 1305 - Applied Hydraulics and PneumaticsDocument7 paginiME 1305 - Applied Hydraulics and PneumaticsUva ShruthikaÎncă nu există evaluări
- Actuators: by K.VarunDocument20 paginiActuators: by K.VarunKryzia Faith CalaguasÎncă nu există evaluări
- Hydraulic System Hydraulics: An Area of Engineering Science That Deals With andDocument19 paginiHydraulic System Hydraulics: An Area of Engineering Science That Deals With andArun Kumar JhaÎncă nu există evaluări
- Chapter 5 Present E PDFDocument33 paginiChapter 5 Present E PDFHabtamu GeremewÎncă nu există evaluări
- 2-Hydraulic Actuators and Control Compenents-2Document57 pagini2-Hydraulic Actuators and Control Compenents-2akhilkrrish143Încă nu există evaluări
- Hydraulics Intro PDFDocument81 paginiHydraulics Intro PDFavinash babuÎncă nu există evaluări
- Machine (Mechanical) - Wikipedia, The Free EncyclopediaDocument10 paginiMachine (Mechanical) - Wikipedia, The Free EncyclopediabmxengineeringÎncă nu există evaluări
- Machine Elements Quiz 1Document17 paginiMachine Elements Quiz 1Quen CuestaÎncă nu există evaluări
- Hydraulics and Pneumatics: A Technician's and Engineer's GuideDe la EverandHydraulics and Pneumatics: A Technician's and Engineer's GuideEvaluare: 4 din 5 stele4/5 (8)
- Design of Sugar Cane MachineDocument79 paginiDesign of Sugar Cane MachineNahom100% (1)
- Mechatronics CHAPTER 3Document39 paginiMechatronics CHAPTER 3NahomÎncă nu există evaluări
- Mechatronics CHAPTER 5Document61 paginiMechatronics CHAPTER 5NahomÎncă nu există evaluări
- Mechatronics CHAPTER 1Document39 paginiMechatronics CHAPTER 1NahomÎncă nu există evaluări
- Design and Fabrication of Sugarcane Juice ExtractorDocument7 paginiDesign and Fabrication of Sugarcane Juice ExtractorNahomÎncă nu există evaluări
- Mechatronics CHAPTER 4Document52 paginiMechatronics CHAPTER 4NahomÎncă nu există evaluări
- Partial Mechanization of Sugarcane Juice Extraction Process: June 2009Document6 paginiPartial Mechanization of Sugarcane Juice Extraction Process: June 2009NahomÎncă nu există evaluări
- Control System 1Document15 paginiControl System 1swatiagrawal_ecÎncă nu există evaluări
- 02 DebretaborDocument2 pagini02 DebretaborNahomÎncă nu există evaluări
- An Introduction To Digital Control Systems - Tutorial: ResearchDocument21 paginiAn Introduction To Digital Control Systems - Tutorial: ResearchNahomÎncă nu există evaluări
- Chapter - 4 Material ManagementDocument41 paginiChapter - 4 Material ManagementNahomÎncă nu există evaluări
- Chapter - 2Document44 paginiChapter - 2NahomÎncă nu există evaluări
- Chapter 3 ContDocument48 paginiChapter 3 ContNahomÎncă nu există evaluări
- Chapter One: Basic Management Concept and Industrial ProudactivityDocument100 paginiChapter One: Basic Management Concept and Industrial ProudactivityNahomÎncă nu există evaluări
- Chapter 5 Project MangmtDocument105 paginiChapter 5 Project MangmtNahomÎncă nu există evaluări
- Chapter - 4 Material ManagementDocument41 paginiChapter - 4 Material ManagementNahomÎncă nu există evaluări
- Introduction To Accounting, Costing and Investment EvaluationDocument77 paginiIntroduction To Accounting, Costing and Investment EvaluationNahomÎncă nu există evaluări
- Chapter 3 ContDocument48 paginiChapter 3 ContNahomÎncă nu există evaluări
- Overview of 140T CraneDocument163 paginiOverview of 140T Cranekr_abhijeet72356587100% (2)
- RBAP Full en Us Letter PDFDocument3 paginiRBAP Full en Us Letter PDFfrancis_15inÎncă nu există evaluări
- Brochure Shellplant LowResDocument126 paginiBrochure Shellplant LowResLina GuerreroÎncă nu există evaluări
- Operating Instructions (ContiLube CL II)Document24 paginiOperating Instructions (ContiLube CL II)drmasster100% (1)
- PICA Hose Problem - Sept-Nov 2012Document20 paginiPICA Hose Problem - Sept-Nov 2012Edwin FitrianÎncă nu există evaluări
- CTC QuickRelease 25-02-2020Document130 paginiCTC QuickRelease 25-02-2020PEX Hydraulics Moçambique, Lda.Încă nu există evaluări
- SPR MAN 4 14 ET Operating ManualDocument24 paginiSPR MAN 4 14 ET Operating ManualJason WeeksÎncă nu există evaluări
- LUDV Control Block of Mono and Sandwich Plate Design Type M7-22Document16 paginiLUDV Control Block of Mono and Sandwich Plate Design Type M7-22W Morales100% (2)
- Valvula de Seguridad (SCSSV) - Tema 4Document150 paginiValvula de Seguridad (SCSSV) - Tema 4sams80% (5)
- Hydraulic Machines IIIDocument73 paginiHydraulic Machines IIINatalieÎncă nu există evaluări
- Datasheet RPE3-06 Ha4010 EN 2Document4 paginiDatasheet RPE3-06 Ha4010 EN 2jimmy__428Încă nu există evaluări
- Combine - Old and New Syllabus - Mechatronics - UG - Updated PDFDocument107 paginiCombine - Old and New Syllabus - Mechatronics - UG - Updated PDFSai AravindÎncă nu există evaluări
- 6001H Service Manual Tier III DUMPERDocument300 pagini6001H Service Manual Tier III DUMPERAlberto100% (3)
- Liugong 836 Wheel Loader 11000 KG 1 7 Cum 125 HPDocument2 paginiLiugong 836 Wheel Loader 11000 KG 1 7 Cum 125 HPmanifesto.amentulhoÎncă nu există evaluări
- Manual de Servicio dv26Document505 paginiManual de Servicio dv26Servi PadÎncă nu există evaluări
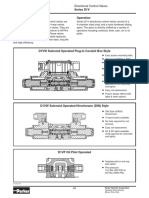
- Serie D1 - Cetop 3Document39 paginiSerie D1 - Cetop 3Hugo MenendezÎncă nu există evaluări
- Engineering Data Ip5-3600Document2 paginiEngineering Data Ip5-3600CESAR SEGURAÎncă nu există evaluări
- Parts Manual: Electric Stacker WS10S-1600MDocument23 paginiParts Manual: Electric Stacker WS10S-1600Mgargi yesareÎncă nu există evaluări
- Installation AND User Manual: Your PumpDocument36 paginiInstallation AND User Manual: Your PumpDavid LynxÎncă nu există evaluări
- BOSCH REXROTH Mobile Hydraulics CatalogDocument984 paginiBOSCH REXROTH Mobile Hydraulics CatalogBernardo Orozco Larios80% (5)
- PC11650P - 54 - 01MAR15 Plat. 635 TDDocument180 paginiPC11650P - 54 - 01MAR15 Plat. 635 TDjosé felippeÎncă nu există evaluări
- © Festo Didactic GMBH & Co. KG, 02/2003 Subject To ChangeDocument2 pagini© Festo Didactic GMBH & Co. KG, 02/2003 Subject To ChangecioranescuÎncă nu există evaluări
- Steering Cylinder - Remove and Install: Shutdown SIS Previous ScreenDocument10 paginiSteering Cylinder - Remove and Install: Shutdown SIS Previous ScreenOdai AlsaafinÎncă nu există evaluări
- 7 JhonDocument45 pagini7 Jhonmagline riosÎncă nu există evaluări
- 2-1 Basic CT EquipmentDocument35 pagini2-1 Basic CT EquipmentAnthony LakpahÎncă nu există evaluări
- Bomag BW 900-2 Operators and Maintenance ManualDocument72 paginiBomag BW 900-2 Operators and Maintenance ManualIslam AttiaÎncă nu există evaluări
- Industrial hydraulics-MANUAL PDFDocument337 paginiIndustrial hydraulics-MANUAL PDFcastro216088% (16)
- Drain Valve CMMDocument62 paginiDrain Valve CMMvishalsachanameÎncă nu există evaluări
- кабельный барабан Operator's manualDocument34 paginiкабельный барабан Operator's manualВасяÎncă nu există evaluări
- Owner'S Manual: Operation Maintenance Parts ListDocument130 paginiOwner'S Manual: Operation Maintenance Parts ListDmitryÎncă nu există evaluări