S-ar putea să vă placă și
- Mandibular MovementDocument56 paginiMandibular MovementSahana RangarajanÎncă nu există evaluări
- Fulltext - Jda v5 Id1107Document3 paginiFulltext - Jda v5 Id1107Sahana RangarajanÎncă nu există evaluări
- Support in Complete DentureDocument30 paginiSupport in Complete DentureSahana Rangarajan100% (2)
- Support in Complete DentureDocument16 paginiSupport in Complete DentureSahana RangarajanÎncă nu există evaluări
- Dynamic Navigation in Dental Implantology: The Influence of Surgical Experience On Implant Placement Accuracy and Operating Time. An in Vitro StudyDocument9 paginiDynamic Navigation in Dental Implantology: The Influence of Surgical Experience On Implant Placement Accuracy and Operating Time. An in Vitro StudySahana RangarajanÎncă nu există evaluări
- 6.clinical Case ReportMultidisciplinary Approach For Rehabilitation of Debilitated Anterior ToothDocument6 pagini6.clinical Case ReportMultidisciplinary Approach For Rehabilitation of Debilitated Anterior ToothSahana RangarajanÎncă nu există evaluări
- Factors Affecting Shade of All Ceramic Restorations - A Literature ReviewDocument8 paginiFactors Affecting Shade of All Ceramic Restorations - A Literature ReviewSahana RangarajanÎncă nu există evaluări
- Different Types of Tooth PreparationDocument56 paginiDifferent Types of Tooth PreparationSahana Rangarajan100% (1)
- Finishing and Polishing Agents: - Presented by DR Arpita DuttaDocument89 paginiFinishing and Polishing Agents: - Presented by DR Arpita DuttaSahana RangarajanÎncă nu există evaluări
- Clinical Report Rehabilitation of Maxillary Surgical Defect With A Cast Partial Denture ObturatorDocument4 paginiClinical Report Rehabilitation of Maxillary Surgical Defect With A Cast Partial Denture ObturatorSahana RangarajanÎncă nu există evaluări
- Significance of Facebow For Dental RestorationsDocument5 paginiSignificance of Facebow For Dental RestorationsSahana RangarajanÎncă nu există evaluări
- Mouth Guards in Dentistry-A Review: September 2018Document6 paginiMouth Guards in Dentistry-A Review: September 2018Sahana RangarajanÎncă nu există evaluări
- A Hollow Bulb Obturator For Maxillary Resection in A Completely Edentulous PatientDocument6 paginiA Hollow Bulb Obturator For Maxillary Resection in A Completely Edentulous PatientSahana RangarajanÎncă nu există evaluări
- 7 Shreeprada Dash IJPHRDDecember 2018 IssueDocument7 pagini7 Shreeprada Dash IJPHRDDecember 2018 IssueSahana RangarajanÎncă nu există evaluări
- 7 RetainerinorthodonticsDocument6 pagini7 RetainerinorthodonticsSahana RangarajanÎncă nu există evaluări
- 3D Printing Industry Roadmap - India (Aerospace) Summit DocumentDocument19 pagini3D Printing Industry Roadmap - India (Aerospace) Summit DocumentSahana RangarajanÎncă nu există evaluări
- Long-Term Follow-Up of Maxillary Fixed Retention: Survival Rate and Periodontal HealthDocument7 paginiLong-Term Follow-Up of Maxillary Fixed Retention: Survival Rate and Periodontal HealthSahana RangarajanÎncă nu există evaluări
- Review: Types of Finish Lines or Gingival Margins Intooth PreparationDocument6 paginiReview: Types of Finish Lines or Gingival Margins Intooth PreparationSahana RangarajanÎncă nu există evaluări
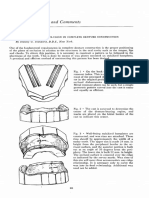
- Cases and Comments: by Stanley G. Standard, D.D.S., New YorkDocument3 paginiCases and Comments: by Stanley G. Standard, D.D.S., New YorkSahana RangarajanÎncă nu există evaluări
- Elegant Galaxy Background Breakthrough by SlidesgoDocument48 paginiElegant Galaxy Background Breakthrough by SlidesgoSahana RangarajanÎncă nu există evaluări
- Sauser 1957Document9 paginiSauser 1957Sahana RangarajanÎncă nu există evaluări
- Prosthodontics Horizontal Jaw Relation: Dr. Firas AbdulameerDocument6 paginiProsthodontics Horizontal Jaw Relation: Dr. Firas AbdulameerSahana RangarajanÎncă nu există evaluări
- Occlusion in Complete DentureDocument57 paginiOcclusion in Complete DentureSahana Rangarajan100% (1)
- Gothic Arch TrachingDocument7 paginiGothic Arch TrachingSahana RangarajanÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Fatty AcidsDocument13 paginiFatty AcidsRaviraj MalaniÎncă nu există evaluări
- Dinengdeng RecipeDocument1 paginăDinengdeng RecipeFuÎncă nu există evaluări
- History of Communication - Project - File - 455 PDFDocument20 paginiHistory of Communication - Project - File - 455 PDFlathaÎncă nu există evaluări
- CH 11 International TradeDocument20 paginiCH 11 International TradeSANTU GHORAIÎncă nu există evaluări
- Acid Bases and Salts Previous Year Questiosn Class 10 ScienceDocument5 paginiAcid Bases and Salts Previous Year Questiosn Class 10 Scienceclashhunting123123Încă nu există evaluări
- Internal Audit, Compliance& Ethics and Risk Management: Section 1) 1.1)Document6 paginiInternal Audit, Compliance& Ethics and Risk Management: Section 1) 1.1)Noora Al ShehhiÎncă nu există evaluări
- Microtech Testing & Research Laboratory: Condition of Sample, When Received: SatisfactoryDocument1 paginăMicrotech Testing & Research Laboratory: Condition of Sample, When Received: SatisfactoryKumar AbhishekÎncă nu există evaluări
- Ebook Essentials of Kumar Clarks Clinical Medicine PDF Full Chapter PDFDocument67 paginiEbook Essentials of Kumar Clarks Clinical Medicine PDF Full Chapter PDFjanet.cochran431100% (19)
- Attention: 6R60/6R75/6R80 Installation GuideDocument4 paginiAttention: 6R60/6R75/6R80 Installation GuideEdwinferÎncă nu există evaluări
- Standard CellDocument53 paginiStandard CellShwethÎncă nu există evaluări
- Javascript PrefiDocument66 paginiJavascript Prefiguendelyn omegaÎncă nu există evaluări
- Student Ought To Possess To Produce Clean-Up and In-Between DrawingsDocument2 paginiStudent Ought To Possess To Produce Clean-Up and In-Between Drawingscristian friasÎncă nu există evaluări
- Chapter 4Document20 paginiChapter 4Vandan GundaleÎncă nu există evaluări
- Euronext Derivatives How The Market Works-V2 PDFDocument106 paginiEuronext Derivatives How The Market Works-V2 PDFTomÎncă nu există evaluări
- Form ConstructionDocument36 paginiForm ConstructionYhoga DheviantÎncă nu există evaluări
- AS Film Production Lesson.Document13 paginiAS Film Production Lesson.MsCowanÎncă nu există evaluări
- SolutionsManual NewDocument123 paginiSolutionsManual NewManoj SinghÎncă nu există evaluări
- Test Report For Feeder Protection RelayDocument3 paginiTest Report For Feeder Protection RelayHari haranÎncă nu există evaluări
- PA SystemDocument4 paginiPA SystemSnehal DambhareÎncă nu există evaluări
- EEE Sofware Lab Experiment 1, PDFDocument11 paginiEEE Sofware Lab Experiment 1, PDF240 Sadman ShafiÎncă nu există evaluări
- The History of The Photocopy MachineDocument2 paginiThe History of The Photocopy MachineAndy WijayaÎncă nu există evaluări
- International Standard: Iso/Iec 7816-2Document16 paginiInternational Standard: Iso/Iec 7816-2Anwar MohamedÎncă nu există evaluări
- The Normal DistributionDocument9 paginiThe Normal DistributionElfren BulongÎncă nu există evaluări
- Ecoflam Burners 2014 enDocument60 paginiEcoflam Burners 2014 enanonimppÎncă nu există evaluări
- 3 - RA-Erecting and Dismantling of Scaffolds (WAH) (Recovered)Document6 pagini3 - RA-Erecting and Dismantling of Scaffolds (WAH) (Recovered)hsem Al EimaraÎncă nu există evaluări
- Imamsha Maharaj Na Parcha NewDocument16 paginiImamsha Maharaj Na Parcha NewNARESH R.PATELÎncă nu există evaluări
- Module 5 - Elements of Financial StatementsDocument34 paginiModule 5 - Elements of Financial StatementsRandolph ColladoÎncă nu există evaluări
- Case For Overhead and DistributionDocument2 paginiCase For Overhead and DistributionBhargav D.S.Încă nu există evaluări
- SalivaDocument42 paginiSalivaAtharva KambleÎncă nu există evaluări