S-ar putea să vă placă și
- College Level Math Practice TestDocument17 paginiCollege Level Math Practice TestHarsha Kasaragod100% (1)
- Goldstein Chapter 2.1 PDFDocument15 paginiGoldstein Chapter 2.1 PDFJulioCesarSanchezRodriguezÎncă nu există evaluări
- Best Practices in MathematicsDocument9 paginiBest Practices in MathematicsPi PoliÎncă nu există evaluări
- Prim Maths 3 2ed TR Learner Book AnswersDocument22 paginiPrim Maths 3 2ed TR Learner Book Answerschitphoekaung1997100% (2)
- Solution Manual For Advanced Fluid Mechanics GCo William Graebel PDFDocument4 paginiSolution Manual For Advanced Fluid Mechanics GCo William Graebel PDFAhmed100% (1)
- Some Stein SolutionsDocument6 paginiSome Stein SolutionsBrunoÎncă nu există evaluări
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesDe la EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesEvaluare: 1.5 din 5 stele1.5/5 (2)
- 7th MathematicsDocument322 pagini7th Mathematicspravanjan reddy poreddyÎncă nu există evaluări
- Problem 2C.4Document9 paginiProblem 2C.4NajwaAinayaZawaidÎncă nu există evaluări
- Grigori PerelmanDocument9 paginiGrigori PerelmanMarios DarvirasÎncă nu există evaluări
- General Math DLL For SHS - (More DLL at Depedtambayanph - Blogspot.com) Q1, Week 01Document2 paginiGeneral Math DLL For SHS - (More DLL at Depedtambayanph - Blogspot.com) Q1, Week 01Jester Guballa de Leon100% (1)
- Flow of A Film On The Outside of A Circular TubeDocument6 paginiFlow of A Film On The Outside of A Circular TubeShubh100% (6)
- Tabele Cu Transformate Laplace, Z, Z-Modificate 2010-2011Document3 paginiTabele Cu Transformate Laplace, Z, Z-Modificate 2010-2011Noni KovacsÎncă nu există evaluări
- BSLTPCH 2 P 2 B7Document7 paginiBSLTPCH 2 P 2 B7AnjaliÎncă nu există evaluări
- HW1 Phys3041Document3 paginiHW1 Phys3041Sam TseÎncă nu există evaluări
- Laboratorio N3Document6 paginiLaboratorio N3juanÎncă nu există evaluări
- Math032 12 03 151Document10 paginiMath032 12 03 151we_spidus_2006Încă nu există evaluări
- Potter SI ISM Chapter 05Document18 paginiPotter SI ISM Chapter 05Faris HishamÎncă nu există evaluări
- Normal NotesDocument3 paginiNormal NotesMoises SanchezÎncă nu există evaluări
- Chapter05 PDFDocument14 paginiChapter05 PDFFerÎncă nu există evaluări
- Chapter 05Document14 paginiChapter 05api-27104079Încă nu există evaluări
- Chapter 05Document14 paginiChapter 05David ChevesÎncă nu există evaluări
- Examples For Green's Theorem, Cylindrical Coordinates, and Spherical CoordinatesDocument2 paginiExamples For Green's Theorem, Cylindrical Coordinates, and Spherical CoordinatesMohd ZubiÎncă nu există evaluări
- Pol Chin SkiDocument3 paginiPol Chin SkiKevin ChenÎncă nu există evaluări
- HW2 SolutionsDocument6 paginiHW2 SolutionsMomoHinamoriChanÎncă nu există evaluări
- 1 Statement of Stokes' TheoremDocument9 pagini1 Statement of Stokes' TheoremDonghyun AhnÎncă nu există evaluări
- HW 1Document8 paginiHW 1Entendiendo La FísicaÎncă nu există evaluări
- MATH2014 - Tutorial 04 SolnDocument2 paginiMATH2014 - Tutorial 04 Solnho100% (1)
- Math 23 Lecture 3.3 Triple Integrals in Cylindrical Coordinates PDFDocument24 paginiMath 23 Lecture 3.3 Triple Integrals in Cylindrical Coordinates PDFyeahÎncă nu există evaluări
- Respuesta Del Problema 8.Document5 paginiRespuesta Del Problema 8.CAMILA ARIASÎncă nu există evaluări
- Circular Plate HODocument6 paginiCircular Plate HOnrnakÎncă nu există evaluări
- Double Integrals in Polar CoordinatesDocument9 paginiDouble Integrals in Polar CoordinatesKaneÎncă nu există evaluări
- Exercises, LE2Document8 paginiExercises, LE2Lenard PunzalÎncă nu există evaluări
- 1-5 Final Requirement Fluid PressureDocument5 pagini1-5 Final Requirement Fluid PressureStiffany GayagoyÎncă nu există evaluări
- 1-10 Final Requirement WorkDocument10 pagini1-10 Final Requirement WorkStiffany GayagoyÎncă nu există evaluări
- 1-5 Final Requirement WorkDocument5 pagini1-5 Final Requirement WorkStiffany GayagoyÎncă nu există evaluări
- Heat and Mass Transfer FormulasDocument4 paginiHeat and Mass Transfer FormulasGazmendKrasniqiÎncă nu există evaluări
- FINAL-Solutions SONUÇDocument4 paginiFINAL-Solutions SONUÇZeynep BayramÎncă nu există evaluări
- Mathematics 1c: Solutions, Homework Set 8Document4 paginiMathematics 1c: Solutions, Homework Set 8alteru4Încă nu există evaluări
- University College London: Curla Nds A DRDocument3 paginiUniversity College London: Curla Nds A DRRoy VeseyÎncă nu există evaluări
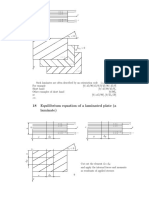
- 18 Equilibrium Equation of A Laminated Plate (A Laminate)Document8 pagini18 Equilibrium Equation of A Laminated Plate (A Laminate)Khalil DeghoumÎncă nu există evaluări
- Fluid Mechanics 2 - Formula Sheet: Conservation EquationDocument5 paginiFluid Mechanics 2 - Formula Sheet: Conservation EquationomrisuÎncă nu există evaluări
- Jackson 3.12 Homework Problem SolutionDocument4 paginiJackson 3.12 Homework Problem SolutionJulieth Bravo OrdoñezÎncă nu există evaluări
- Finanzas Free Boundary Value ProblesDocument30 paginiFinanzas Free Boundary Value ProblesMauro SalinasÎncă nu există evaluări
- Geodesic GRDocument23 paginiGeodesic GRAyush DubeÎncă nu există evaluări
- Supplementary SummerDocument7 paginiSupplementary Summer张琳Încă nu există evaluări
- Fiber IntroductionDocument6 paginiFiber IntroductionSouvikÎncă nu există evaluări
- Ho 4Document9 paginiHo 4zhangtongzhou1998Încă nu există evaluări
- Aerodynamics QuestionDocument20 paginiAerodynamics QuestionDaniel AntonyÎncă nu există evaluări
- Formulario 1PP - 2015Document2 paginiFormulario 1PP - 2015davidÎncă nu există evaluări
- (Mechanics of Surface Structurls-Springer Netherlands (1988) 23Document1 pagină(Mechanics of Surface Structurls-Springer Netherlands (1988) 23Aslıhan YücesoyÎncă nu există evaluări
- PM Spring 2017 SolutionsDocument15 paginiPM Spring 2017 SolutionsHamza ShafiqÎncă nu există evaluări
- Evaluating Integrals ResiduesDocument12 paginiEvaluating Integrals Residuesjohndoe314Încă nu există evaluări
- Appendix J Z Transform TableDocument1 paginăAppendix J Z Transform TableCarlos Morales CarbajalÎncă nu există evaluări
- Ed 5Document8 paginiEd 5Fengfan RenÎncă nu există evaluări
- Chapter 3 PDFDocument13 paginiChapter 3 PDFNguyễn ThắngÎncă nu există evaluări
- Coupled Mode Equations in FIber OpticsDocument22 paginiCoupled Mode Equations in FIber OpticsAbhisek RoyÎncă nu există evaluări
- Formulae Mathematical PhysicsDocument13 paginiFormulae Mathematical PhysicsprajwalcuriousÎncă nu există evaluări
- Formula Sheet PDFDocument3 paginiFormula Sheet PDFAnjumaÎncă nu există evaluări
- Fiche NavierStokes2Document2 paginiFiche NavierStokes2Tania NoorÎncă nu există evaluări
- PS3 SolsDocument7 paginiPS3 SolsArnab BhowmikÎncă nu există evaluări
- Hari Bera: Complex Analysis (Complex Analysis: Note-3) Semester-6 Core Course-6-13 UNIT-2Document22 paginiHari Bera: Complex Analysis (Complex Analysis: Note-3) Semester-6 Core Course-6-13 UNIT-2RahulÎncă nu există evaluări
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27De la EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Încă nu există evaluări
- Tables of Weber Functions: Mathematical Tables, Vol. 1De la EverandTables of Weber Functions: Mathematical Tables, Vol. 1Încă nu există evaluări
- 3.14.4 Test (TST) - Shapes (Test)Document10 pagini3.14.4 Test (TST) - Shapes (Test)Bumble BeanÎncă nu există evaluări
- Math 7 - Q3 M3Document14 paginiMath 7 - Q3 M3Steven Louis UyÎncă nu există evaluări
- Cherry Rose T. Malgapo: Probability and StatisticsDocument26 paginiCherry Rose T. Malgapo: Probability and StatisticscherryÎncă nu există evaluări
- DLL-9th-week 52-59Document8 paginiDLL-9th-week 52-59Reina Chenna SaulongÎncă nu există evaluări
- IB Mathematics SL Syllabus ContentDocument10 paginiIB Mathematics SL Syllabus ContentshivaniÎncă nu există evaluări
- Asymptotic Analysis-1/KICSIT/Mr. Fahim Khan/1Document29 paginiAsymptotic Analysis-1/KICSIT/Mr. Fahim Khan/1Sanwal abbasiÎncă nu există evaluări
- GCSE Edexcel '08 Modular Higher Mark Scheme 2007 June Unit 2Document5 paginiGCSE Edexcel '08 Modular Higher Mark Scheme 2007 June Unit 2LeilaTasukiÎncă nu există evaluări
- MFEMD Ch09Document10 paginiMFEMD Ch09Abdel DaaÎncă nu există evaluări
- Math 55 3rd Exam Exercises PDFDocument3 paginiMath 55 3rd Exam Exercises PDFMark ReyesÎncă nu există evaluări
- Autobiography of Sir George Biddell Airy by Airy, George Biddell, 1801-1892Document275 paginiAutobiography of Sir George Biddell Airy by Airy, George Biddell, 1801-1892Gutenberg.orgÎncă nu există evaluări
- C CheatsheetDocument1 paginăC CheatsheetRay WanÎncă nu există evaluări
- Christopher L. Henley - Effective-Hamiltonian Approach To Long-Range Spin Order in The Classical Kagome AntiferromagnetDocument4 paginiChristopher L. Henley - Effective-Hamiltonian Approach To Long-Range Spin Order in The Classical Kagome AntiferromagnetPo48HSDÎncă nu există evaluări
- Basic Number Theory: Cryptography - CS 507 Erkay Savas Sabanci University Erkays@sabanciuniv - EduDocument33 paginiBasic Number Theory: Cryptography - CS 507 Erkay Savas Sabanci University Erkays@sabanciuniv - EduJowhie Anne ReyesÎncă nu există evaluări
- 1.1 Classification of SignalsDocument37 pagini1.1 Classification of SignalsIbrahim MansourÎncă nu există evaluări
- ChapterStat 2Document77 paginiChapterStat 2Md Aziq Md RaziÎncă nu există evaluări
- Past Papers IGCSE 2014 41Document10 paginiPast Papers IGCSE 2014 41David ThydetÎncă nu există evaluări
- PG Time Table-2012Document12 paginiPG Time Table-2012Yashwanth JvÎncă nu există evaluări
- Math 1 - Q1 TOS SY 2023 2024Document2 paginiMath 1 - Q1 TOS SY 2023 2024Jennifer Regala Y CometâÎncă nu există evaluări
- The Kalman Decomposition PDFDocument5 paginiThe Kalman Decomposition PDFJose H. Vivas100% (2)
- Higher-Order DerivativesDocument3 paginiHigher-Order DerivativesStevenzel Eala EstellaÎncă nu există evaluări
- Self-Instructional Manual (SIM) For Self-Directed Learning (SDL) Authors: Engr. Richard Regidor Engr. Esther Consuelo TanDocument35 paginiSelf-Instructional Manual (SIM) For Self-Directed Learning (SDL) Authors: Engr. Richard Regidor Engr. Esther Consuelo TanArlene PolinarÎncă nu există evaluări
- EMTL BIT PAPER III Year I SemDocument2 paginiEMTL BIT PAPER III Year I SemECE HODÎncă nu există evaluări
- D18NNDocument372 paginiD18NNMarius GherguÎncă nu există evaluări
- Digital Logic and DesignDocument54 paginiDigital Logic and DesignANJALI PATELÎncă nu există evaluări