S-ar putea să vă placă și
- Analisis de CA de TransistoresDocument23 paginiAnalisis de CA de TransistoresPako MdtÎncă nu există evaluări
- LABORATORIO N2 - Cade Simu Inversión de GiroDocument5 paginiLABORATORIO N2 - Cade Simu Inversión de GiroMelissa DámarisÎncă nu există evaluări
- s14 - Logica TTL y CmosDocument26 paginis14 - Logica TTL y CmosJHORDAM MAXWELL GOMEZ TORRES100% (1)
- Guia de LorenzoDocument27 paginiGuia de LorenzoJuan Felipe Acuña100% (1)
- Ejercicios de ELECTRÓNICA DE POTENCIADocument30 paginiEjercicios de ELECTRÓNICA DE POTENCIAGabiita Lara Cevallos100% (2)
- Inversión de Giro Con PLCDocument4 paginiInversión de Giro Con PLCOsnaider Ramos VillalobosÎncă nu există evaluări
- Practica 3 PLC-Inversion de Giro de MotorDocument10 paginiPractica 3 PLC-Inversion de Giro de MotorKevin Alejandro0% (1)
- Examen Unidad 5 Electronica 2 ImprimirDocument5 paginiExamen Unidad 5 Electronica 2 ImprimirJuanito Jones Indiana100% (1)
- Guia 3 - Rectificador Monofásico ControladoDocument9 paginiGuia 3 - Rectificador Monofásico ControladoKentner Chavez CorreaÎncă nu există evaluări
- Practica LavadoraDocument6 paginiPractica LavadoraArturinMandujanoÎncă nu există evaluări
- Entradas Salidas DiscretasDocument13 paginiEntradas Salidas DiscretasMijael Ramos Barrientos100% (1)
- Ejercicio Resuelto PicDocument2 paginiEjercicio Resuelto PicRaul Julian Roque0% (1)
- Comparadores, Entradas y Salidas Digitales (Automatización Industrial)Document9 paginiComparadores, Entradas y Salidas Digitales (Automatización Industrial)Angel RomeroÎncă nu există evaluări
- Arranque Estrella Triangulo (Informe Ieee)Document2 paginiArranque Estrella Triangulo (Informe Ieee)Miguel Suarez Sierra100% (2)
- Conclusión: Poseen Dos Estados Estables: .: Circuitos Biestables o Flip-Flop (FF)Document12 paginiConclusión: Poseen Dos Estados Estables: .: Circuitos Biestables o Flip-Flop (FF)Francisco RomeroÎncă nu există evaluări
- Informe Temporizadores On Delay Off DelayDocument4 paginiInforme Temporizadores On Delay Off DelayDenisse TorresÎncă nu există evaluări
- Informe Final ContadoresDocument9 paginiInforme Final ContadoresBrayan TGÎncă nu există evaluări
- Ejercicio 6 Cargador Vertical MultipleDocument4 paginiEjercicio 6 Cargador Vertical MultipleJose Cabal100% (1)
- PLC Logo InformeDocument7 paginiPLC Logo InformeraulÎncă nu există evaluări
- Aplicaciones de Los Registros de DesplazamientoDocument7 paginiAplicaciones de Los Registros de Desplazamientocarranzabustinza50% (2)
- Semana #01Document47 paginiSemana #01Cesar Robles63% (24)
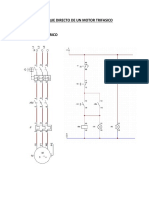
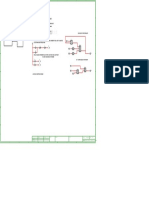
- Arranque Directo de Un Motor Trifasico Por Inversion de GiroDocument5 paginiArranque Directo de Un Motor Trifasico Por Inversion de GiroCristian JeanPier Jara VillanuevaÎncă nu există evaluări
- Eeit Eeit-419 FormatoalumnotrabajofinalDocument8 paginiEeit Eeit-419 FormatoalumnotrabajofinalMarcelo Domínguez0% (1)
- Arranque Fifo y LifoDocument17 paginiArranque Fifo y LifoAugusto Mazoniz0% (1)
- Arranque SecuencialDocument4 paginiArranque SecuencialNayely Ponce50% (2)
- Practica #1 - Arranque Directo de Un Motor Trifasico Jaula de ArdillaDocument14 paginiPractica #1 - Arranque Directo de Un Motor Trifasico Jaula de ArdillaJesus Joel Gaspar Vasquez100% (1)
- Arranque Directo de Un Motor TrifasicoDocument11 paginiArranque Directo de Un Motor TrifasicodavidyoveraÎncă nu există evaluări
- Capturas Semaforo Simple y Cruce (Cadesimu)Document6 paginiCapturas Semaforo Simple y Cruce (Cadesimu)Marco Andrés TigseÎncă nu există evaluări
- Conversor Ac - DC - ADocument26 paginiConversor Ac - DC - AYulner Angel Huaman AriasÎncă nu există evaluări
- Convertidor AC ACDocument4 paginiConvertidor AC ACFabián CubillosÎncă nu există evaluări
- Ejemplos y Ejercicios de Control IndustrialDocument25 paginiEjemplos y Ejercicios de Control IndustrialMilton Fonseca Zurita80% (10)
- Lab05 - Conversor AC ACDocument14 paginiLab05 - Conversor AC ACAlejandra RoqueÎncă nu există evaluări
- Entradas y Salidas Analogicas PLC S7-1200Document4 paginiEntradas y Salidas Analogicas PLC S7-1200Marco Vinicio Dj50% (2)
- Informe 2 Arranque Directo Motores TrifasicosDocument5 paginiInforme 2 Arranque Directo Motores TrifasicosFranklin TrigosÎncă nu există evaluări
- SINCRONOSCOPIODocument46 paginiSINCRONOSCOPIOFrank C. Flores100% (1)
- TiristoresDocument68 paginiTiristoresjorje perez flores0% (1)
- Electronica de Potencia-Trabajo Final 2Document8 paginiElectronica de Potencia-Trabajo Final 2I'm césar LoliÎncă nu există evaluări
- Arranque Directo Grafcet, LaddeDocument1 paginăArranque Directo Grafcet, LaddeVictor Layme jaraÎncă nu există evaluări
- Objetivos SCRDocument6 paginiObjetivos SCRL Hernan CubaÎncă nu există evaluări
- Contador Asincrónico Descendente Módulo 32Document3 paginiContador Asincrónico Descendente Módulo 32Cristian AguilarÎncă nu există evaluări
- Indique Cuales Cantidades Son Analógicas y DigitalesDocument2 paginiIndique Cuales Cantidades Son Analógicas y Digitalesjaar_ant50% (4)
- Compuertas Funciones LogoDocument4 paginiCompuertas Funciones Logogfc12345678100% (2)
- Escalera AutomaticaDocument8 paginiEscalera AutomaticaAngello Melo100% (2)
- Arranque de Un Motor Trifasico Desde Dos Puntos de MandoDocument20 paginiArranque de Un Motor Trifasico Desde Dos Puntos de Mandoanyer0% (4)
- Arranque Directo de Dos Motores en Secuencia Forzada (Clase 03-07-13)Document6 paginiArranque Directo de Dos Motores en Secuencia Forzada (Clase 03-07-13)Giovanni HF100% (1)
- Taladradora AutomaticaDocument3 paginiTaladradora Automaticanorberto soto jacobo100% (1)
- Tipos de Programación de PLCDocument3 paginiTipos de Programación de PLCAlex Barrera43% (7)
- Practica Logixpro Dul CompressorDocument6 paginiPractica Logixpro Dul Compressorjaimecarros1234100% (1)
- Arranque y Paro de Un Motor Trifásico Utilizando PLC LOGODocument4 paginiArranque y Paro de Un Motor Trifásico Utilizando PLC LOGOJahir OrtizÎncă nu există evaluări
- Arranque Directo de Un Motor TrifasicoDocument11 paginiArranque Directo de Un Motor TrifasicoLINDER ARCE INGAÎncă nu există evaluări
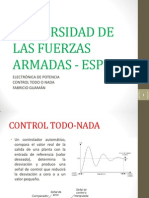
- Control Todo o NadaDocument12 paginiControl Todo o NadaFaBro GsÎncă nu există evaluări
- Trabajo Preparatorio N°7Document3 paginiTrabajo Preparatorio N°7Danilo Punina0% (1)
- Informe Taller 5 SMEDocument31 paginiInforme Taller 5 SMEElita BarzolaÎncă nu există evaluări
- Funcionamiento Del Rele TermicoDocument1 paginăFuncionamiento Del Rele TermicoJuan De la cruzÎncă nu există evaluări
- EEID-418 - CUADERNO DE INFORMES Segunda SemanaDocument16 paginiEEID-418 - CUADERNO DE INFORMES Segunda SemanaRichard NavarroÎncă nu există evaluări
- Inversor de GiroDocument10 paginiInversor de GiroAlvaroÎncă nu există evaluări
- Diagramas de ArranqueDocument10 paginiDiagramas de ArranqueJesús Huanco AncoÎncă nu există evaluări
- PracticasDocument9 paginiPracticasel warrior666 xdÎncă nu există evaluări
- Arranque Estrella Triangulo de Un Motor de Induccion TrifasicoDocument5 paginiArranque Estrella Triangulo de Un Motor de Induccion Trifasicotoni003133% (3)
- Sistemas de Accionamiento Eléctrico LAB 1-2Document11 paginiSistemas de Accionamiento Eléctrico LAB 1-2NirvanaxDÎncă nu există evaluări
- Laboratorio 06 - DigitalesDocument11 paginiLaboratorio 06 - DigitalesAlvaroÎncă nu există evaluări
- Demultiplexores y MultiplexoresDocument8 paginiDemultiplexores y MultiplexoresAlvaroÎncă nu există evaluări
- PLC y SensoresDocument26 paginiPLC y SensoresAlvaroÎncă nu există evaluări
- Minimización de Funciones Lógicas de La Familia TTLDocument19 paginiMinimización de Funciones Lógicas de La Familia TTLAlvaroÎncă nu există evaluări
- 3 VoltimetrosDocument21 pagini3 VoltimetrosAlvaroÎncă nu există evaluări
- Inversor YdDocument17 paginiInversor YdAlvaroÎncă nu există evaluări
- Arranque de Motores en Estrella Triangulo: 1) ObjetivosDocument13 paginiArranque de Motores en Estrella Triangulo: 1) ObjetivosAlvaroÎncă nu există evaluări
- ColumnasDocument14 paginiColumnasAlvaroÎncă nu există evaluări
- Inversor de GiroDocument10 paginiInversor de GiroAlvaroÎncă nu există evaluări
- Ejercicios Teorema de La DivergenciaDocument2 paginiEjercicios Teorema de La DivergenciaAlvaroÎncă nu există evaluări
- Arte RenacentistaDocument7 paginiArte RenacentistaAlvaroÎncă nu există evaluări
- Laboratorio 1 CIIDocument43 paginiLaboratorio 1 CIIAlvaroÎncă nu există evaluări
- Arranque DirectoDocument10 paginiArranque DirectoAlvaroÎncă nu există evaluări
- Arte GriegoDocument29 paginiArte GriegoAlvaroÎncă nu există evaluări
- ImanesDocument8 paginiImanesAlvaro100% (1)
- ARR - de Estado SolidDocument13 paginiARR - de Estado SolidAlvaroÎncă nu există evaluări
- AUTOINDUCTANCIADocument5 paginiAUTOINDUCTANCIAAlvaroÎncă nu există evaluări
- MemoriasDocument21 paginiMemoriasAlvaroÎncă nu există evaluări
- ZZZZDocument19 paginiZZZZAlvaroÎncă nu există evaluări
- Cobol PDFDocument31 paginiCobol PDFAlvaroÎncă nu există evaluări
- Decodificadores y CodificadoresDocument16 paginiDecodificadores y CodificadoresAlvaroÎncă nu există evaluări
- Cobol PDFDocument31 paginiCobol PDFAlvaroÎncă nu există evaluări
- Fisica AlondraDocument14 paginiFisica Alondravictor contrerasÎncă nu există evaluări
- Coches EléctricosDocument7 paginiCoches EléctricosJonnatthan AbannÎncă nu există evaluări
- Palas CargadorasDocument68 paginiPalas CargadorasAndres TorresÎncă nu există evaluări
- Tema 8 - Mecanismos. Concepción de Las MáquinasDocument20 paginiTema 8 - Mecanismos. Concepción de Las MáquinasjorgequiereviolarafernandoÎncă nu există evaluări
- Unidad 4 Máquinas de CC. GeneradorDocument18 paginiUnidad 4 Máquinas de CC. GeneradorGonzalo Fabian CastroÎncă nu există evaluări
- 20 preguntas-Motores-UniversalesDocument6 pagini20 preguntas-Motores-UniversalesMänuel Älejandro100% (1)
- ResumenDocument5 paginiResumenFranklin Vargas GòmezÎncă nu există evaluări
- ABC de Las InstalacionesDocument10 paginiABC de Las InstalacionesGabriel Marouch100% (1)
- Daniel Felipe Ibañez - 11A - Fisica (Aplicaciones de La Carga Eléctrica)Document2 paginiDaniel Felipe Ibañez - 11A - Fisica (Aplicaciones de La Carga Eléctrica)Daniel IbañezÎncă nu există evaluări
- Arranque y Control de Motor BrushlessDocument25 paginiArranque y Control de Motor BrushlessJhulian VillafuerteÎncă nu există evaluări
- Iea Ai Unidad08Document60 paginiIea Ai Unidad08loloÎncă nu există evaluări
- Practica # Instalaciones IndustrialesDocument3 paginiPractica # Instalaciones IndustrialesmarcoÎncă nu există evaluări
- Informe: Maquinas de Elevación y TransporteDocument10 paginiInforme: Maquinas de Elevación y TransporteElizabethÎncă nu există evaluări
- Informe Del Proyecto de Circuitos Logicos y SecuencialesDocument13 paginiInforme Del Proyecto de Circuitos Logicos y SecuencialesHUGO ANDERSON MEDRANO MAMANIÎncă nu există evaluări
- Tema 1 Introducción A Los MotoresDocument46 paginiTema 1 Introducción A Los MotoresDiego SánchezÎncă nu există evaluări
- Eval Sem RME CDocument2 paginiEval Sem RME CJhonÎncă nu există evaluări
- Electricista AutomotrizDocument5 paginiElectricista AutomotrizFrank CastañedaÎncă nu există evaluări
- Sistema de Bombeo Ultimo 2-2-2020Document74 paginiSistema de Bombeo Ultimo 2-2-2020xDarZonx viÎncă nu există evaluări
- Formato Pre-InformeDocument2 paginiFormato Pre-Informejohan cañonÎncă nu există evaluări
- Lista Precios 2018Document108 paginiLista Precios 2018Carlos Espinosa100% (1)
- Examen Parcial 05Document15 paginiExamen Parcial 05Oscar Gutarra Quispe0% (1)
- Electricidad Industrial: Planes Y Programas EspecialidadDocument21 paginiElectricidad Industrial: Planes Y Programas Especialidadjavier perez100% (1)
- Examen Parcial 2Document6 paginiExamen Parcial 2Alan AlvarezÎncă nu există evaluări
- Cuadernillo de MotoreselectricosDocument24 paginiCuadernillo de MotoreselectricosjasobpqÎncă nu există evaluări
- Corrientes Cortocircuito Sistemas TrifasicosDocument43 paginiCorrientes Cortocircuito Sistemas TrifasicosPablo Angel ToiaÎncă nu există evaluări
- Suministro de 12 MW Cerro VerdeDocument23 paginiSuministro de 12 MW Cerro VerdeAlvaro RoqueÎncă nu există evaluări
- Tipos de BombeoDocument60 paginiTipos de BombeocarlosÎncă nu există evaluări
- Examen A - MAQUINAS ELECTRICASDocument2 paginiExamen A - MAQUINAS ELECTRICASErikson Huancahuari GalvezÎncă nu există evaluări
- Tecnologia Superior en Mecanica AutomotrizDocument4 paginiTecnologia Superior en Mecanica AutomotrizLuis Ivan PugaÎncă nu există evaluări
- Retrovisores Eléctricos Grupo1 Aucapiña CorderoTorres Cevallos Gonzalez TuapanteDocument11 paginiRetrovisores Eléctricos Grupo1 Aucapiña CorderoTorres Cevallos Gonzalez TuapanteDanny Pacheco Auquilla100% (1)