S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- DotNetNuke 7.0.6 SuperUser ManualDocument1.413 paginiDotNetNuke 7.0.6 SuperUser ManualjimmyjoeÎncă nu există evaluări
- Chrysler Dodge Ram Jeep Drive Cycle InformationDocument2 paginiChrysler Dodge Ram Jeep Drive Cycle InformationslpkthÎncă nu există evaluări
- Barefoot Running: Have Sneakers Changed The Way We Run?Document21 paginiBarefoot Running: Have Sneakers Changed The Way We Run?jimmyjoeÎncă nu există evaluări
- Operating Instructions: DMR-EH55Document84 paginiOperating Instructions: DMR-EH55jimmyjoeÎncă nu există evaluări
- Mental Magnetism Course by Harry Lorayne PDFDocument424 paginiMental Magnetism Course by Harry Lorayne PDFjimmyjoe100% (5)
- User Manual: Question? Contact PhilipsDocument16 paginiUser Manual: Question? Contact PhilipsjimmyjoeÎncă nu există evaluări
- Rear Drive System: Service InstructionsDocument6 paginiRear Drive System: Service InstructionsjimmyjoeÎncă nu există evaluări
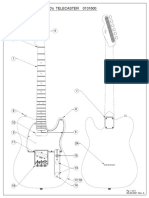
- 60's TELECASTERDocument4 pagini60's TELECASTERjimmyjoeÎncă nu există evaluări
- A Comparative Study of Categorical Variable Encoding TechniquesDocument4 paginiA Comparative Study of Categorical Variable Encoding TechniquesjimmyjoeÎncă nu există evaluări
- Markdown CheatsheetDocument1 paginăMarkdown CheatsheetjimmyjoeÎncă nu există evaluări
- Policy Gradient MethodsDocument28 paginiPolicy Gradient MethodsjimmyjoeÎncă nu există evaluări
- Muddy Waters DiscographyDocument9 paginiMuddy Waters DiscographyjimmyjoeÎncă nu există evaluări
- 10 Must Know Jazz Guitar Licks EbookDocument8 pagini10 Must Know Jazz Guitar Licks Ebookjimmyjoe100% (3)
- Differentiating Language Difference and Language Disorder - Information For Teachers Working With English Language Learners in The Schools PDFDocument23 paginiDifferentiating Language Difference and Language Disorder - Information For Teachers Working With English Language Learners in The Schools PDFIqra HassanÎncă nu există evaluări
- Dr. N. Kumarappan IE (I) Council Candidate - Electrical DivisionDocument1 paginăDr. N. Kumarappan IE (I) Council Candidate - Electrical Divisionshanmugasundaram32Încă nu există evaluări
- English Lesson Plan Form 4 (Literature: "The Living Photograph")Document2 paginiEnglish Lesson Plan Form 4 (Literature: "The Living Photograph")Maisarah Mohamad100% (3)
- Proac Studio 100: Monitor Level Performance From An Established Compact DesignDocument2 paginiProac Studio 100: Monitor Level Performance From An Established Compact DesignAnonymous c3vuAsWAÎncă nu există evaluări
- Asian RegionalismDocument15 paginiAsian RegionalismLiezel AalaÎncă nu există evaluări
- MAPEH-Arts: Quarter 3 - Module 2Document24 paginiMAPEH-Arts: Quarter 3 - Module 2Girlie Oguan LovendinoÎncă nu există evaluări
- How To Spend An Hour A Day in Prayer - Matthew 26:40-41Document1 paginăHow To Spend An Hour A Day in Prayer - Matthew 26:40-41Steve GainesÎncă nu există evaluări
- Lecture Planner - Chemistry - MANZIL For JEE 2024Document1 paginăLecture Planner - Chemistry - MANZIL For JEE 2024Rishi NairÎncă nu există evaluări
- The Senior High School in The Phillipines: The Way To The WorldDocument5 paginiThe Senior High School in The Phillipines: The Way To The WorldRodel Ramos DaquioagÎncă nu există evaluări
- TRUMPF Marking Laser BrochureDocument48 paginiTRUMPF Marking Laser BrochureKKM SBÎncă nu există evaluări
- Chemistry Previos Papaer 313Document19 paginiChemistry Previos Papaer 313Ashu GuptaÎncă nu există evaluări
- Goal SettingDocument11 paginiGoal Settingraul_mahadikÎncă nu există evaluări
- BraunDocument69 paginiBraunLouise Alyssa SazonÎncă nu există evaluări
- BAB 3 - Follow UpDocument6 paginiBAB 3 - Follow UpDelinda Erutheya NathanÎncă nu există evaluări
- IRAQ Reproductive Maternal, Newborn, Child and Adolescent HealthDocument32 paginiIRAQ Reproductive Maternal, Newborn, Child and Adolescent HealthbejarhasanÎncă nu există evaluări
- Cross CultureDocument134 paginiCross CulturePhương AnnhÎncă nu există evaluări
- AMC Middle Primary Years 3 and 4 - SolutionsDocument6 paginiAMC Middle Primary Years 3 and 4 - SolutionsSherry JiangÎncă nu există evaluări
- PICUDocument107 paginiPICUsarikaÎncă nu există evaluări
- DbmsDocument5 paginiDbmsRohit KushwahaÎncă nu există evaluări
- MODULE 1 - Contemporary WorldDocument4 paginiMODULE 1 - Contemporary WorldaapÎncă nu există evaluări
- Compal Confidential: Ziwb2/Ziwb3/Ziwe1 DIS M/B Schematics DocumentDocument56 paginiCompal Confidential: Ziwb2/Ziwb3/Ziwe1 DIS M/B Schematics DocumentSuhpreetÎncă nu există evaluări
- Liquid Process Piping - Part 1 General Piping Design PDFDocument33 paginiLiquid Process Piping - Part 1 General Piping Design PDFnitin guptaÎncă nu există evaluări
- FacebookDocument2 paginiFacebookAbhijeet SingareÎncă nu există evaluări
- Topic 4 Statistic II (Form 3)Document2 paginiTopic 4 Statistic II (Form 3)Ct KursiahÎncă nu există evaluări
- A Software Architecture For The Control of Biomaterials MaintenanceDocument4 paginiA Software Architecture For The Control of Biomaterials MaintenanceCristian ȘtefanÎncă nu există evaluări
- Philips fwt9200Document37 paginiPhilips fwt9200Alex BrazÎncă nu există evaluări
- Arabian Choice General Trading Co. LLCDocument1 paginăArabian Choice General Trading Co. LLCjaanÎncă nu există evaluări
- GCGM PDFDocument11 paginiGCGM PDFMiguel Angel Martin100% (1)
- A Technical Report ON Centre of Pressure ONA Plane Surface ExperimentDocument13 paginiA Technical Report ON Centre of Pressure ONA Plane Surface ExperimentVictor OwolekeÎncă nu există evaluări