S-ar putea să vă placă și
- Module 1 Measurement VectorDocument25 paginiModule 1 Measurement VectorGreen BrainÎncă nu există evaluări
- Non - Rectangular Components: Prepared By: D.M.ODocument5 paginiNon - Rectangular Components: Prepared By: D.M.OCiero John MarkÎncă nu există evaluări
- Rectilinear Motion: Engr. John Dharyl R. de Leon, ReeDocument22 paginiRectilinear Motion: Engr. John Dharyl R. de Leon, ReeJamie MedallaÎncă nu există evaluări
- Engage: Module2: Kinematics Module 2 Unit 1: Motion On A Straight LineDocument18 paginiEngage: Module2: Kinematics Module 2 Unit 1: Motion On A Straight LineKarl EliezerÎncă nu există evaluări
- Lecture 2 (Kinematics of Particles, Uniform Rectilinear Motion - Uniformly Accelerated Rectilinear Motion)Document26 paginiLecture 2 (Kinematics of Particles, Uniform Rectilinear Motion - Uniformly Accelerated Rectilinear Motion)Robby RebolledoÎncă nu există evaluări
- This Study Resource Was: Expert AnswerDocument3 paginiThis Study Resource Was: Expert AnswerMarc Jairro GajudoÎncă nu există evaluări
- Final Exam in TrigoDocument6 paginiFinal Exam in TrigomvmbappleÎncă nu există evaluări
- Principles of StaticsDocument7 paginiPrinciples of StaticsJommarVocalTagalogÎncă nu există evaluări
- Mechanics of Deformable Bodies Module 2Document19 paginiMechanics of Deformable Bodies Module 2eysÎncă nu există evaluări
- ABE 228 Engg Mech 2 Module 2Document14 paginiABE 228 Engg Mech 2 Module 2Cynel DelaÎncă nu există evaluări
- QUIZ 1 - Engineering Utilities 1Document1 paginăQUIZ 1 - Engineering Utilities 1Gemaris Laurenaria MercadoÎncă nu există evaluări
- Differential Equations - Elementary Applications of ODE PDFDocument41 paginiDifferential Equations - Elementary Applications of ODE PDFBob BlohÎncă nu există evaluări
- CE 010 - FUNDAMENTALS OF SURVEYING Lecture 6Document11 paginiCE 010 - FUNDAMENTALS OF SURVEYING Lecture 6gabriel obtinallaÎncă nu există evaluări
- Double Integration MethodDocument10 paginiDouble Integration Methodmau_boi16100% (1)
- Engineering Data Analysis M9 FinalsDocument39 paginiEngineering Data Analysis M9 FinalsJohn Arvin EscoteÎncă nu există evaluări
- Module 2 (Horizontal Route Alignment 1)Document6 paginiModule 2 (Horizontal Route Alignment 1)Owene Miles AguinaldoÎncă nu există evaluări
- Problem: SolutionDocument6 paginiProblem: SolutionOverHorizon shameÎncă nu există evaluări
- Engineering MechanicsDocument100 paginiEngineering MechanicsShahzeb Karamat100% (2)
- Umay DesignDocument55 paginiUmay DesignMhel CenidozaÎncă nu există evaluări
- DE Lec 1-9Document9 paginiDE Lec 1-9Cheat CodeÎncă nu există evaluări
- Ch. 6 GravitationDocument10 paginiCh. 6 GravitationJoanne Aga EslavaÎncă nu există evaluări
- Summative 1 ReviewerDocument11 paginiSummative 1 ReviewerJuli BakerÎncă nu există evaluări
- Normal and Tangential Components of AccelerationDocument8 paginiNormal and Tangential Components of AccelerationihtishamqabidÎncă nu există evaluări
- Computer Fundamentals and Programming 2 Laboratory Laboratory No. 1.1 Title: Microsoft Excel ProgrammingDocument6 paginiComputer Fundamentals and Programming 2 Laboratory Laboratory No. 1.1 Title: Microsoft Excel ProgrammingLuna CapitÎncă nu există evaluări
- Republic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayaDocument35 paginiRepublic of The Philippines Nueva Vizcaya State University Bayombong, Nueva VizcayalanyÎncă nu există evaluări
- Exp 1 Q&ADocument4 paginiExp 1 Q&AJulia FlorencioÎncă nu există evaluări
- Stat 8-25-2020Document4 paginiStat 8-25-2020Lee-an AnayonÎncă nu există evaluări
- Module 2 - Equilibrium of Rigid BodiesDocument21 paginiModule 2 - Equilibrium of Rigid BodiesJoyce AsisÎncă nu există evaluări
- PH 001 FrictionDocument28 paginiPH 001 FrictionRenju Kokkatt100% (1)
- Assignment 1Document8 paginiAssignment 1Amit RanjanÎncă nu există evaluări
- Isu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotionDocument22 paginiIsu Module Subject: CE 223 and Dynamics of Rigid Bodies Continuation of Chapter 1 Topic 4 General Curvilinear MotioneysÎncă nu există evaluări
- Lecture 4 - FrictionDocument15 paginiLecture 4 - FrictionJomarLlanto100% (2)
- Take Home MidtermDocument2 paginiTake Home MidtermEngr.PenguinÎncă nu există evaluări
- Engineering Data AnalysisDocument5 paginiEngineering Data AnalysisJoshuaÎncă nu există evaluări
- Ce212 Lecture 1 - Geology For Civil Engineering IntroductionDocument11 paginiCe212 Lecture 1 - Geology For Civil Engineering IntroductionKIM JINHWANÎncă nu există evaluări
- Basic Ee Ece - Prelim LecDocument28 paginiBasic Ee Ece - Prelim LecWingel LullabyÎncă nu există evaluări
- 2 Moisture Content of Aggregates - MIOTENDocument7 pagini2 Moisture Content of Aggregates - MIOTENAirielle MIotenÎncă nu există evaluări
- Module 6 SptopicsDocument25 paginiModule 6 SptopicsIan Gabriel P. PaduaÎncă nu există evaluări
- Foundation Engineering: Module 2: Geotechnical Properties of SoilDocument4 paginiFoundation Engineering: Module 2: Geotechnical Properties of SoilAljon AvilaÎncă nu există evaluări
- Distance Education Course Guide Using Obtl Design V1: Flexible Learning A.Y. 2020-2021Document6 paginiDistance Education Course Guide Using Obtl Design V1: Flexible Learning A.Y. 2020-2021Amer ArtesanoÎncă nu există evaluări
- Elimination of Arbitrary ConstantsDocument4 paginiElimination of Arbitrary ConstantsShirsendu Mondol100% (1)
- Sci 404 - Physics 2 - Midterm - Part IiDocument2 paginiSci 404 - Physics 2 - Midterm - Part IiJezreel GamboaÎncă nu există evaluări
- STATICS OF RIGID BODIES Chapter IDocument23 paginiSTATICS OF RIGID BODIES Chapter IViron LucerianoÎncă nu există evaluări
- MCQs in Engineering Mathematics Part 10Document12 paginiMCQs in Engineering Mathematics Part 10Richster LofrancoÎncă nu există evaluări
- Ther 1 - 110614Document37 paginiTher 1 - 110614So NnyÎncă nu există evaluări
- JPICE Quiz BeeDocument12 paginiJPICE Quiz BeemateojullieanneÎncă nu există evaluări
- Chapter 4 Equilibrium of A Rigid BodyDocument12 paginiChapter 4 Equilibrium of A Rigid BodyWilliam JugalbotÎncă nu există evaluări
- Payabyab, WI - Basic EE and ECE - PSET 1Document11 paginiPayabyab, WI - Basic EE and ECE - PSET 1Wingel LullabyÎncă nu există evaluări
- Lesson 1 and 2Document15 paginiLesson 1 and 2Ian Arnold Fami50% (2)
- Module-1 INTRO OF SURVEYINGDocument13 paginiModule-1 INTRO OF SURVEYINGNess GleoÎncă nu există evaluări
- 4 Second Order Linear ODEs 1Document64 pagini4 Second Order Linear ODEs 1Lanz CaballaÎncă nu există evaluări
- 6 - Linear Differential Equations of Order N PDFDocument19 pagini6 - Linear Differential Equations of Order N PDFRuel Japhet BitoyÎncă nu există evaluări
- Mechanics of Deformable Bodies Module 1Document14 paginiMechanics of Deformable Bodies Module 1jhuascute06Încă nu există evaluări
- FUNSUR 214 Chapter 1 LessonsDocument64 paginiFUNSUR 214 Chapter 1 LessonsEros SendicoÎncă nu există evaluări
- CE Board Nov 2020 - Hydraulics - Set 1Document1 paginăCE Board Nov 2020 - Hydraulics - Set 1Froilan Balumbago Monikas100% (2)
- Practice Problems SurveyingDocument2 paginiPractice Problems SurveyingRitsu TainakaÎncă nu există evaluări
- Chapter 4Document14 paginiChapter 4Julieta AbanÎncă nu există evaluări
- Trusses 72 85Document91 paginiTrusses 72 85Carlorel AnteÎncă nu există evaluări
- Statics of Rigid BodiesDocument91 paginiStatics of Rigid Bodies20-08702Încă nu există evaluări
- Ghawar Oil FieldDocument40 paginiGhawar Oil FieldRome Erwin Manalo FestinÎncă nu există evaluări
- Drilling EngineeringDocument77 paginiDrilling EngineeringLok Bahadur RanaÎncă nu există evaluări
- Pete CircuitsDocument41 paginiPete CircuitsRome Erwin Manalo FestinÎncă nu există evaluări
- Full Scale Implementation of Sulfate Enhanced Biodegradation...Document10 paginiFull Scale Implementation of Sulfate Enhanced Biodegradation...Rome Erwin Manalo FestinÎncă nu există evaluări
- Al KanesDocument4 paginiAl Kanesmeshet007Încă nu există evaluări
- Chapter 13 Unsaturated Hydrocarbons: Solutions To In-Chapter ProblemsDocument30 paginiChapter 13 Unsaturated Hydrocarbons: Solutions To In-Chapter ProblemsRome Erwin Manalo FestinÎncă nu există evaluări
- C6 - (Solutions Manual) Electric Machinery 6ed Fitzgerald, Kingsley, Uman - C7Document15 paginiC6 - (Solutions Manual) Electric Machinery 6ed Fitzgerald, Kingsley, Uman - C7Belayneh Tadesse100% (2)
- C6 - (Solutions Manual) Electric Machinery 6ed Fitzgerald, Kingsley, Uman - C7Document15 paginiC6 - (Solutions Manual) Electric Machinery 6ed Fitzgerald, Kingsley, Uman - C7Belayneh Tadesse100% (2)
- Questions 1-2 For Log 1: 5. 5 InchDocument2 paginiQuestions 1-2 For Log 1: 5. 5 InchRome Erwin Manalo FestinÎncă nu există evaluări
- ENGN.2050 Assignment 02 Solution Fall 2016Document12 paginiENGN.2050 Assignment 02 Solution Fall 2016Anonymous GuQd67Încă nu există evaluări
- Week One INTRODUCTION TO ETHICS Site Real Life Situations That Caught Us OnDocument9 paginiWeek One INTRODUCTION TO ETHICS Site Real Life Situations That Caught Us OnPamela MorcillaÎncă nu există evaluări
- Concrete Lab ManualDocument20 paginiConcrete Lab ManualkelmazodroÎncă nu există evaluări
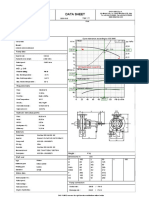
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Document3 paginiData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaÎncă nu există evaluări
- Rules and Fallacies For Categorical SyllogismsDocument5 paginiRules and Fallacies For Categorical SyllogismsFatima Ismael PortacioÎncă nu există evaluări
- The Practice Book - Doing Passivation ProcessDocument22 paginiThe Practice Book - Doing Passivation ProcessNikos VrettakosÎncă nu există evaluări
- Introducing Eventstorming-4Document1 paginăIntroducing Eventstorming-4Alex TrujilloÎncă nu există evaluări
- Machine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDocument26 paginiMachine Design REE 302: CH 1: Introduction To Mechanical Engineering DesignDull PersonÎncă nu există evaluări
- Reading Proficiency Level of Students: Basis For Reading Intervention ProgramDocument13 paginiReading Proficiency Level of Students: Basis For Reading Intervention ProgramSONY JOY QUINTOÎncă nu există evaluări
- Content Analysis of Studies On Cpec Coverage: A Comparative Study of Pakistani and Chinese NewspapersDocument18 paginiContent Analysis of Studies On Cpec Coverage: A Comparative Study of Pakistani and Chinese NewspapersfarhanÎncă nu există evaluări
- Postmodernism in Aha! MovieDocument2 paginiPostmodernism in Aha! MovieSayma AkterÎncă nu există evaluări
- 3.1 MuazuDocument8 pagini3.1 MuazuMon CastrÎncă nu există evaluări
- The Genius of Marie Curie Shohini GhoseDocument4 paginiThe Genius of Marie Curie Shohini GhoseMarta HrynyovskaÎncă nu există evaluări
- Electric PotentialDocument26 paginiElectric PotentialGlitchÎncă nu există evaluări
- Swanand 2009Document3 paginiSwanand 2009maverick2929Încă nu există evaluări
- Aspen Plus User ModelsDocument339 paginiAspen Plus User Modelskiny81100% (1)
- Puratattva No 41Document3 paginiPuratattva No 41ultimategoonÎncă nu există evaluări
- All Papers of Thermodyanmics and Heat TransferDocument19 paginiAll Papers of Thermodyanmics and Heat TransfervismayluhadiyaÎncă nu există evaluări
- Module 2 DIPDocument33 paginiModule 2 DIPdigital loveÎncă nu există evaluări
- Surge Arrester PresentationDocument63 paginiSurge Arrester PresentationRamiro FelicianoÎncă nu există evaluări
- ER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestDocument3 paginiER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestWr ArÎncă nu există evaluări
- 9300AE 10-30kseis LDN 2005 PDFDocument2 pagini9300AE 10-30kseis LDN 2005 PDFDoina ClichiciÎncă nu există evaluări
- Florida Motor Fuel Tax Relief Act of 2022Document9 paginiFlorida Motor Fuel Tax Relief Act of 2022ABC Action NewsÎncă nu există evaluări
- Power - Factor - Correction - LegrandDocument24 paginiPower - Factor - Correction - LegrandrehanÎncă nu există evaluări
- Lecture 11 - Performance AppraisalsDocument23 paginiLecture 11 - Performance AppraisalsCard CardÎncă nu există evaluări
- Practical Research 2.9Document22 paginiPractical Research 2.9Michael GabertanÎncă nu există evaluări
- Hooke's LawDocument1 paginăHooke's LawAnan BarghouthyÎncă nu există evaluări
- Manual - Rapid Literacy AssessmentDocument16 paginiManual - Rapid Literacy AssessmentBaldeo PreciousÎncă nu există evaluări
- Catalog NeosetDocument173 paginiCatalog NeosetCarmen Draghia100% (1)
- Relay G30 ManualDocument42 paginiRelay G30 ManualLeon KhiuÎncă nu există evaluări
- STFC-2023 International E - conference-BITDocument6 paginiSTFC-2023 International E - conference-BITRanilprabhu MÎncă nu există evaluări
- DD 3334Document2 paginiDD 3334FAQMD2Încă nu există evaluări