S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- NCERT Class 12 Accountancy Part 2Document329 paginiNCERT Class 12 Accountancy Part 2KishorVedpathak100% (2)
- K Lite Catalogue 2Document126 paginiK Lite Catalogue 2Walter Antezano CasalloÎncă nu există evaluări
- Tool Box On Intersection Safety & Design PDFDocument172 paginiTool Box On Intersection Safety & Design PDFupsarki7547Încă nu există evaluări
- Traffic Impact Assessment ReportDocument23 paginiTraffic Impact Assessment Reportadera150% (2)
- Balance Sheet: by Dr. ArchanaDocument19 paginiBalance Sheet: by Dr. ArchanaHan JeeÎncă nu există evaluări
- Problem and Issues in Pasay CityDocument15 paginiProblem and Issues in Pasay CityRon AgamataÎncă nu există evaluări
- Ertiga 6-Pager Brochure - CNGDocument2 paginiErtiga 6-Pager Brochure - CNGSmriti RanjanÎncă nu există evaluări
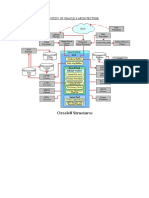
- Study of Oracle 8 ArchitectureDocument1 paginăStudy of Oracle 8 ArchitectureHan JeeÎncă nu există evaluări
- NCERT Class 11 Accountancy Part 1 PDFDocument334 paginiNCERT Class 11 Accountancy Part 1 PDFGouse SmdÎncă nu există evaluări
- World We KnowDocument23 paginiWorld We KnowsomushankarÎncă nu există evaluări
- Toyota Toyota Brochure1022Document8 paginiToyota Toyota Brochure1022Han JeeÎncă nu există evaluări
- Media Release RIL 30072020 PDFDocument20 paginiMedia Release RIL 30072020 PDFHan JeeÎncă nu există evaluări
- KIA SonetDocument4 paginiKIA SonetNishu NeemaÎncă nu există evaluări
- Lecture 2 SimplexDocument20 paginiLecture 2 Simplexm3gp13 yoÎncă nu există evaluări
- Corporate2019 PDFDocument8 paginiCorporate2019 PDFRk RkÎncă nu există evaluări
- AGM - MD & GCEO's Address: Umang Vohra Aug 2020Document7 paginiAGM - MD & GCEO's Address: Umang Vohra Aug 2020Han JeeÎncă nu există evaluări
- The Next Evolution of Beacons: SL SK SFDocument6 paginiThe Next Evolution of Beacons: SL SK SFNico PopÎncă nu există evaluări
- CE Ch.6 ScrewFasteningDocument8 paginiCE Ch.6 ScrewFasteningHan JeeÎncă nu există evaluări
- CE Ch.2 Cordless PDFDocument74 paginiCE Ch.2 Cordless PDFHan JeeÎncă nu există evaluări
- AGM - MD & GCEO's Address: Umang Vohra Aug 2020Document7 paginiAGM - MD & GCEO's Address: Umang Vohra Aug 2020Han JeeÎncă nu există evaluări
- PDF-Katalog Item New Products 2013 SpringDocument36 paginiPDF-Katalog Item New Products 2013 SpringHan JeeÎncă nu există evaluări
- The Next Evolution of Beacons: SL SK SFDocument6 paginiThe Next Evolution of Beacons: SL SK SFNico PopÎncă nu există evaluări
- Ril Ar 2018 PDFDocument444 paginiRil Ar 2018 PDFRudra PratapÎncă nu există evaluări
- Corporate2019 PDFDocument8 paginiCorporate2019 PDFRk RkÎncă nu există evaluări
- RIL Media Release 4Q FY 19 20 1 PDFDocument16 paginiRIL Media Release 4Q FY 19 20 1 PDFJameel KhanÎncă nu există evaluări
- Cipla Notice 2019 2020v1Document17 paginiCipla Notice 2019 2020v1Han JeeÎncă nu există evaluări
- Low Profile Xyθ Stage: Kohzu Precision Co.,LtdDocument2 paginiLow Profile Xyθ Stage: Kohzu Precision Co.,LtdHan JeeÎncă nu există evaluări
- PDF-Katalog Item TPS-Platform System Catalouge 2013 SpringDocument24 paginiPDF-Katalog Item TPS-Platform System Catalouge 2013 SpringHan JeeÎncă nu există evaluări
- The Power Drive.: New Renault DUSTER The True SUVDocument7 paginiThe Power Drive.: New Renault DUSTER The True SUVHan JeeÎncă nu există evaluări
- Mba 1 P 6Document68 paginiMba 1 P 6Angel Lavender100% (1)
- O-AI07b enDocument2 paginiO-AI07b enmoulay abdallahÎncă nu există evaluări
- DocumentDocument2 paginiDocumentmoulay abdallahÎncă nu există evaluări
- Brochure Kwid 21 8 2020 PDFDocument9 paginiBrochure Kwid 21 8 2020 PDFJethalalÎncă nu există evaluări
- A Reference Collection For Web Spam: ACM SIGIR Forum December 2006Document15 paginiA Reference Collection For Web Spam: ACM SIGIR Forum December 2006Han JeeÎncă nu există evaluări
- Željeznice Federacije ČlanakDocument13 paginiŽeljeznice Federacije ČlanakIsmarKalesicÎncă nu există evaluări
- Project Report On Design of Road IntersectionDocument15 paginiProject Report On Design of Road IntersectionJohn MalkinÎncă nu există evaluări
- 51 Annual Revision of Toll Fee To Be Effective From 01.04.2019 PDFDocument5 pagini51 Annual Revision of Toll Fee To Be Effective From 01.04.2019 PDFAnubhav JainÎncă nu există evaluări
- Study of Accidents On NH-140 and Its Preventive Measures: February 2018Document6 paginiStudy of Accidents On NH-140 and Its Preventive Measures: February 2018Sharanayya ShankinÎncă nu există evaluări
- LA Metro - 485Document3 paginiLA Metro - 485cartographica100% (6)
- Check List For Audit of Existing RoadDocument7 paginiCheck List For Audit of Existing RoadThasneem K. SÎncă nu există evaluări
- Self-Driving Cars - The Human Side: November 2017Document7 paginiSelf-Driving Cars - The Human Side: November 2017Bhavesh soni BkkcÎncă nu există evaluări
- SE Bikes - 2014 Tripel - Bike ArchivesDocument2 paginiSE Bikes - 2014 Tripel - Bike ArchivesMark ArchambeaultÎncă nu există evaluări
- Crash RegulationDocument2 paginiCrash RegulationNarayananÎncă nu există evaluări
- Calls To Dispatch SampleDocument9 paginiCalls To Dispatch SampleSteve MartiniÎncă nu există evaluări
- Defensive Driving SeminarDocument92 paginiDefensive Driving SeminarUrej BandiolaÎncă nu există evaluări
- JFK Airport MapDocument1 paginăJFK Airport MapSalik IqbalÎncă nu există evaluări
- Ilf & Petrov - American PhotographsDocument11 paginiIlf & Petrov - American PhotographsDianaÎncă nu există evaluări
- 10.contoh Soal Chapter 10 Kinds of Transportation They Use To Go To Some PlacesDocument5 pagini10.contoh Soal Chapter 10 Kinds of Transportation They Use To Go To Some Placespriyo cirebonÎncă nu există evaluări
- Drivers Manual 0723 EnglishDocument120 paginiDrivers Manual 0723 EnglishУІАП ГУНП в Луганській областіÎncă nu există evaluări
- Speed LimitDocument4 paginiSpeed LimitLesterÎncă nu există evaluări
- Daily Conveyance Expense SheetDocument3 paginiDaily Conveyance Expense Sheetjamshed idcolÎncă nu există evaluări
- Realistic Speed LimitsDocument2 paginiRealistic Speed LimitsScott BrownÎncă nu există evaluări
- Aim6 Evening - 7.11.2018Document4 paginiAim6 Evening - 7.11.2018Mai UyênÎncă nu există evaluări
- Organization Structure of Indian RailwaysDocument1 paginăOrganization Structure of Indian RailwaysFaisal Ahmed AhmedÎncă nu există evaluări
- KL Customer List Sept'23Document1 paginăKL Customer List Sept'23captainmicke55Încă nu există evaluări
- Andaman NicobarDocument1 paginăAndaman NicobarSarang MohideÎncă nu există evaluări
- Gdot Signing and Marking Design GuidelinesDocument143 paginiGdot Signing and Marking Design GuidelinesBryan McCranieÎncă nu există evaluări
- TSD Rally IntroductionDocument39 paginiTSD Rally Introductionravi bhallaÎncă nu există evaluări
- Lecture-5 Street Lighting: Md. Manik Mia Lecturer Sonargaon UniversityDocument14 paginiLecture-5 Street Lighting: Md. Manik Mia Lecturer Sonargaon UniversityManik MiaÎncă nu există evaluări
- Brompton Bikes IntroductionDocument2 paginiBrompton Bikes IntroductionHarriet OliviaÎncă nu există evaluări