S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- PDF Siddha MedicineDocument59 paginiPDF Siddha Medicinekr28678100% (1)
- Civil Service Exam Clerical Operations QuestionsDocument5 paginiCivil Service Exam Clerical Operations QuestionsJeniGatelaGatillo100% (3)
- Audio - Questions: Safety Equipment Reliability Handbook (SERH) 4th EditionDocument29 paginiAudio - Questions: Safety Equipment Reliability Handbook (SERH) 4th EditionLuc SchramÎncă nu există evaluări
- USDA Guide To CanningDocument7 paginiUSDA Guide To CanningWindage and Elevation0% (1)
- 3d Control Sphere Edge and Face StudyDocument4 pagini3d Control Sphere Edge and Face Studydjbroussard100% (2)
- 100 Training Games - Kroehnert, GaryDocument180 pagini100 Training Games - Kroehnert, GarywindsorccÎncă nu există evaluări
- New Hire WorkbookDocument40 paginiNew Hire WorkbookkÎncă nu există evaluări
- NABARD road inspection report formatDocument24 paginiNABARD road inspection report formatSrinivas PÎncă nu există evaluări
- Kathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Document236 paginiKathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Csongor KicsiÎncă nu există evaluări
- Manual WinMASW EngDocument357 paginiManual WinMASW EngRolanditto QuuisppeÎncă nu există evaluări
- History of Microfinance in NigeriaDocument9 paginiHistory of Microfinance in Nigeriahardmanperson100% (1)
- Photosynthesis Lab ReportDocument7 paginiPhotosynthesis Lab ReportTishaÎncă nu există evaluări
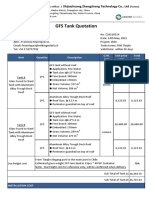
- GFS Tank Quotation C20210514Document4 paginiGFS Tank Quotation C20210514Francisco ManriquezÎncă nu există evaluări
- Reading and Writing Q1 - M13Document13 paginiReading and Writing Q1 - M13Joshua Lander Soquita Cadayona100% (1)
- Weight ControlDocument43 paginiWeight ControlParthiban VaratharajÎncă nu există evaluări
- Learn C by Example in Just 5 Hours Tutorial OnDocument10 paginiLearn C by Example in Just 5 Hours Tutorial Onஹரி கிருஷ்ணன் வாசுÎncă nu există evaluări
- Yarn Faults: Types Causes RemediesDocument20 paginiYarn Faults: Types Causes Remediesஹரி கிருஷ்ணன் வாசு71% (7)
- Microprocessors and MicrocontrollersDocument25 paginiMicroprocessors and Microcontrollersengwisam2020Încă nu există evaluări
- Measure Linear Displacement with LVDT SensorsDocument7 paginiMeasure Linear Displacement with LVDT Sensorsஹரி கிருஷ்ணன் வாசுÎncă nu există evaluări
- DOE Tank Safety Workshop Presentation on Hydrogen Tank TestingDocument36 paginiDOE Tank Safety Workshop Presentation on Hydrogen Tank TestingAlex AbakumovÎncă nu există evaluări
- Consensus Building e Progettazione Partecipata - Marianella SclaviDocument7 paginiConsensus Building e Progettazione Partecipata - Marianella SclaviWilma MassuccoÎncă nu există evaluări
- Beauty ProductDocument12 paginiBeauty ProductSrishti SoniÎncă nu există evaluări
- October 2009 Centeral Aucland, Royal Forest and Bird Protecton Society NewsletterDocument8 paginiOctober 2009 Centeral Aucland, Royal Forest and Bird Protecton Society NewsletterRoyal Forest and Bird Protecton SocietyÎncă nu există evaluări
- Chapter 19 - 20 Continuous Change - Transorganizational ChangeDocument12 paginiChapter 19 - 20 Continuous Change - Transorganizational ChangeGreen AvatarÎncă nu există evaluări
- Todo Matic PDFDocument12 paginiTodo Matic PDFSharrife JÎncă nu există evaluări
- Ultra Slimpak G448-0002: Bridge Input Field Configurable IsolatorDocument4 paginiUltra Slimpak G448-0002: Bridge Input Field Configurable IsolatorVladimirÎncă nu există evaluări
- The Service Marketing Plan On " Expert Personalized Chef": Presented byDocument27 paginiThe Service Marketing Plan On " Expert Personalized Chef": Presented byA.S. ShuvoÎncă nu există evaluări
- Unr Ece R046Document74 paginiUnr Ece R046rianteri1125Încă nu există evaluări
- Physics Derived Units and Unit Prefixes Derived UnitDocument15 paginiPhysics Derived Units and Unit Prefixes Derived UnitJohnRenzoMolinarÎncă nu există evaluări
- United-nations-Organization-uno Solved MCQs (Set-4)Document8 paginiUnited-nations-Organization-uno Solved MCQs (Set-4)SãñÂt SûRÿá MishraÎncă nu există evaluări
- Pulse Width ModulationDocument13 paginiPulse Width Modulationhimanshu jainÎncă nu există evaluări
- SBI Sample PaperDocument283 paginiSBI Sample Paperbeintouch1430% (1)
- Combined Set12Document159 paginiCombined Set12Nguyễn Sơn LâmÎncă nu există evaluări
- Big Joe Pds30-40Document198 paginiBig Joe Pds30-40mauro garciaÎncă nu există evaluări
- Seminar Course Report ON Food SafetyDocument25 paginiSeminar Course Report ON Food SafetyYanÎncă nu există evaluări