S-ar putea să vă placă și
- Dynamics Homework 4Document6 paginiDynamics Homework 4Kelly Reardon100% (1)
- Tutorial Chapter 02 - AnswerDocument8 paginiTutorial Chapter 02 - AnswerFateh Hakeem100% (4)
- Morison's EquationDocument25 paginiMorison's Equation금동민Încă nu există evaluări
- Problem Set 6-Chapter 1sdfsdfds - Helical Compression Spring-Selected ProblemsDocument28 paginiProblem Set 6-Chapter 1sdfsdfds - Helical Compression Spring-Selected ProblemsvivekzzÎncă nu există evaluări
- Vidyalangar Sample TestDocument4 paginiVidyalangar Sample Testpaptc642002Încă nu există evaluări
- 2 3 1 A Stressstraincalculations 1 1Document5 pagini2 3 1 A Stressstraincalculations 1 1api-308131962Încă nu există evaluări
- Design of MachinesDocument12 paginiDesign of MachinesRenold ElsenÎncă nu există evaluări
- Sif B31 3Document10 paginiSif B31 3Sergio SmithÎncă nu există evaluări
- Mixed Integer-Discrete-Continuous Optimization by Differential EvolutionDocument6 paginiMixed Integer-Discrete-Continuous Optimization by Differential EvolutionZaryan IjazÎncă nu există evaluări
- Finite Element Analysis AE2351Document5 paginiFinite Element Analysis AE2351Aghil BuddyÎncă nu există evaluări
- Put The Title of The Paper Here With Font, Size,, Length: Arial 16pt Centered Up To 2 LinesDocument4 paginiPut The Title of The Paper Here With Font, Size,, Length: Arial 16pt Centered Up To 2 LinesSiva SenthilÎncă nu există evaluări
- fpz3 A PDFDocument265 paginifpz3 A PDFrohitÎncă nu există evaluări
- Topological Fixture Synthesis Using Semidenite Programming: Chih-Jen Lin Nestor Michelena and Romesh Saigal 1. AbstractDocument6 paginiTopological Fixture Synthesis Using Semidenite Programming: Chih-Jen Lin Nestor Michelena and Romesh Saigal 1. AbstractfsoodÎncă nu există evaluări
- KSSC 3 2007 7 4 297 (C)Document13 paginiKSSC 3 2007 7 4 297 (C)ismael.lorandi623Încă nu există evaluări
- MECH68Document8 paginiMECH68GogyÎncă nu există evaluări
- Problem Set 7-Chapter 12 - Helical Compression Spring-Selected Problems PDFDocument28 paginiProblem Set 7-Chapter 12 - Helical Compression Spring-Selected Problems PDFDhawal Singh KatreÎncă nu există evaluări
- Fea QBDocument5 paginiFea QBKalpit KauraseÎncă nu există evaluări
- Strength of Materials-II 2-2 Set-2 (A)Document13 paginiStrength of Materials-II 2-2 Set-2 (A)Sri DÎncă nu există evaluări
- Design of A Helical Compression Spring For Static Loading: An Alternate ApproachDocument5 paginiDesign of A Helical Compression Spring For Static Loading: An Alternate ApproachRama KumarÎncă nu există evaluări
- CIE3150 2017 Case Study Beam V 03-2Document19 paginiCIE3150 2017 Case Study Beam V 03-2FerdiVKÎncă nu există evaluări
- Characteristic Withdrawal Capacity and Stiffness of Threaded RodsDocument13 paginiCharacteristic Withdrawal Capacity and Stiffness of Threaded RodsAndrej SørensenÎncă nu există evaluări
- Springs PDFDocument7 paginiSprings PDFanimeshkumarvermaÎncă nu există evaluări
- Machine Design I Learning Module I: Stress Analysis: Authored By: Engr. Ronnie Tavares Rat/8/17/2013/8:55 PMDocument32 paginiMachine Design I Learning Module I: Stress Analysis: Authored By: Engr. Ronnie Tavares Rat/8/17/2013/8:55 PMOtil SeravatÎncă nu există evaluări
- Pewaja Steel SectionDocument80 paginiPewaja Steel SectionWok YohÎncă nu există evaluări
- FEA Question BankDocument6 paginiFEA Question Bankmenmoli2012Încă nu există evaluări
- Design Standard and SpecificationDocument8 paginiDesign Standard and SpecificationRiot AyaseÎncă nu există evaluări
- Gate Mechanical Engineering 2010Document8 paginiGate Mechanical Engineering 2010aeroherozÎncă nu există evaluări
- Helical Spring DesignDocument7 paginiHelical Spring DesignsohamkoliÎncă nu există evaluări
- Tutorial Questions and Solutions For EEPS02 - ZD WangDocument8 paginiTutorial Questions and Solutions For EEPS02 - ZD WangSaidur Rahman SidÎncă nu există evaluări
- 159 - Changes in IEEE80Document6 pagini159 - Changes in IEEE80dmcalderoncÎncă nu există evaluări
- Chapter 5 - The FDTD Simulation ProgramDocument30 paginiChapter 5 - The FDTD Simulation Programnevada1292Încă nu există evaluări
- Me 533project1Document26 paginiMe 533project1api-284224507Încă nu există evaluări
- SST Turbulence ModelDocument8 paginiSST Turbulence Modelmatteo_1234Încă nu există evaluări
- Technical AssesmentDocument7 paginiTechnical AssesmentbikramjitpodderÎncă nu există evaluări
- TorsionDocument3 paginiTorsionTannyVaneÎncă nu există evaluări
- Wire Springs, - Flat Springs, or - Special ShapedDocument25 paginiWire Springs, - Flat Springs, or - Special Shapedbiruk tolossaÎncă nu există evaluări
- 1 s2.0 0301751692900769 MainDocument12 pagini1 s2.0 0301751692900769 Main9kqjkrv9sfÎncă nu există evaluări
- Design - Springs: D J D A D F D FDDocument3 paginiDesign - Springs: D J D A D F D FDIsa GomÎncă nu există evaluări
- Machine Design MD by S K Mondal T&Q PDFDocument263 paginiMachine Design MD by S K Mondal T&Q PDFAbhijeet SahuÎncă nu există evaluări
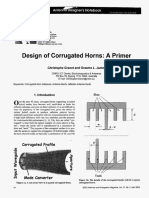
- Corrugadas GranetDocument9 paginiCorrugadas GranetKevs SsmÎncă nu există evaluări
- v60 74Document7 paginiv60 74Vijaya KumarÎncă nu există evaluări
- Torsion 6th ChapterDocument13 paginiTorsion 6th ChapterakshatbhargavaÎncă nu există evaluări
- SpringDocument1 paginăSpringvirtualpop3Încă nu există evaluări
- Reluctance: I. Magnetic Circuit ConceptDocument12 paginiReluctance: I. Magnetic Circuit ConceptMahabub HossainÎncă nu există evaluări
- The Optimisation of Internal Gears - ScienceDirectDocument14 paginiThe Optimisation of Internal Gears - ScienceDirectjavadÎncă nu există evaluări
- Progress in Electromagnetics Research C, Vol. 9, 171-182, 2009Document12 paginiProgress in Electromagnetics Research C, Vol. 9, 171-182, 2009thuantndtvt2883Încă nu există evaluări
- Summary of Equations and Tables - En1992-2 Eurocode 2 - Design of Concrete Structures 2C Part 2 - Concrete BridgesDocument21 paginiSummary of Equations and Tables - En1992-2 Eurocode 2 - Design of Concrete Structures 2C Part 2 - Concrete BridgesgoawaynowÎncă nu există evaluări
- Journal of Mechanical Engineering Science 1978 Rao 271 82Document13 paginiJournal of Mechanical Engineering Science 1978 Rao 271 82mehtabpathanÎncă nu există evaluări
- Lecture 5.1 - Design Mechanical PropertiesDocument30 paginiLecture 5.1 - Design Mechanical PropertiesFatimah Binti Abd RahmanÎncă nu există evaluări
- Home Machine - Parts - Index Spring IndexDocument9 paginiHome Machine - Parts - Index Spring IndexRakesh KumarÎncă nu există evaluări
- ME - GATE-2013 : Answer: (D)Document17 paginiME - GATE-2013 : Answer: (D)Manoj Singh RawatÎncă nu există evaluări
- Constructed Layered Systems: Measurements and AnalysisDe la EverandConstructed Layered Systems: Measurements and AnalysisÎncă nu există evaluări
- Geometric functions in computer aided geometric designDe la EverandGeometric functions in computer aided geometric designÎncă nu există evaluări
- Dynamic Damage and FragmentationDe la EverandDynamic Damage and FragmentationDavid Edward LambertÎncă nu există evaluări
- O level Physics Questions And Answer Practice Papers 2De la EverandO level Physics Questions And Answer Practice Papers 2Evaluare: 5 din 5 stele5/5 (1)
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionDe la EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- 3.1. Schematic Explorer View Schematic Explorer: 3 Working With The Diagrams ApplicationDocument4 pagini3.1. Schematic Explorer View Schematic Explorer: 3 Working With The Diagrams ApplicationMayur MandrekarÎncă nu există evaluări
- Savework / Getwork SaveworkDocument4 paginiSavework / Getwork SaveworkMayur MandrekarÎncă nu există evaluări
- GWWDDocument3 paginiGWWDMayur MandrekarÎncă nu există evaluări
- New SCGROUP: Schematic Group Rename Apply Dismiss: All Button Can Be UsedDocument3 paginiNew SCGROUP: Schematic Group Rename Apply Dismiss: All Button Can Be UsedMayur MandrekarÎncă nu există evaluări
- XsxefcrDocument5 paginiXsxefcrMayur MandrekarÎncă nu există evaluări
- 2.6 Computer Aided Assembly of Rigid Bodies: P P Q Q P P QDocument4 pagini2.6 Computer Aided Assembly of Rigid Bodies: P P Q Q P P QMayur MandrekarÎncă nu există evaluări
- Weights Are All Non-Negative and For Any Value of The Parameter, They Sum To UnityDocument2 paginiWeights Are All Non-Negative and For Any Value of The Parameter, They Sum To UnityMayur MandrekarÎncă nu există evaluări
- 01 PDFDocument2 pagini01 PDFMayur MandrekarÎncă nu există evaluări
- British Steel Universal Beams PFC Datasheet PDFDocument2 paginiBritish Steel Universal Beams PFC Datasheet PDFMayur MandrekarÎncă nu există evaluări
- Gate Solved Paper - Me: X Aq Q y A Q Dy Q Q Q QDocument51 paginiGate Solved Paper - Me: X Aq Q y A Q Dy Q Q Q QMayur MandrekarÎncă nu există evaluări
- Check Opc Types: V-111S Process VesselDocument1 paginăCheck Opc Types: V-111S Process VesselMayur MandrekarÎncă nu există evaluări
- 00 PDFDocument2 pagini00 PDFMayur MandrekarÎncă nu există evaluări
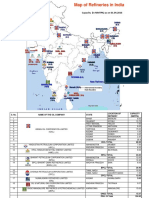
- RefineriesMap PDFDocument2 paginiRefineriesMap PDFMayur MandrekarÎncă nu există evaluări
- New Doc 2017-07-27 - 1Document1 paginăNew Doc 2017-07-27 - 1Mayur MandrekarÎncă nu există evaluări
- 3 Cascade-Control DesignDocument2 pagini3 Cascade-Control Designmiguel dumaniÎncă nu există evaluări
- LATEST TRENDS in ENGINEERING MECHANICS, STRUCTURES, ENGINEERING GEOLOGYDocument13 paginiLATEST TRENDS in ENGINEERING MECHANICS, STRUCTURES, ENGINEERING GEOLOGYHarold TaylorÎncă nu există evaluări
- Fasteners (Threaded and Non-Threaded) PDFDocument41 paginiFasteners (Threaded and Non-Threaded) PDFGcwalisile DlaminiÎncă nu există evaluări
- Resonancia Magnetica Principios FisicosDocument662 paginiResonancia Magnetica Principios FisicosAnthony Paredes VargasÎncă nu există evaluări
- Determination of Stress Concentration FactorsDocument5 paginiDetermination of Stress Concentration FactorsEduardo Felippe de SouzaÎncă nu există evaluări
- Control SystemsDocument96 paginiControl SystemsDr. Gollapalli NareshÎncă nu există evaluări
- Heat Mass TransferDocument5 paginiHeat Mass Transferlampshade17Încă nu există evaluări
- GEASDocument5 paginiGEASEdward Roy “Ying” AyingÎncă nu există evaluări
- Holzer's Method and Geared SystemsDocument15 paginiHolzer's Method and Geared SystemsWen Ming Lau100% (2)
- Igcse Unit - C Forces Movement Shapeand MomentumDocument3 paginiIgcse Unit - C Forces Movement Shapeand Momentumapi-255623302Încă nu există evaluări
- Bolt DesignDocument19 paginiBolt DesignGaurav BedseÎncă nu există evaluări
- Literature Review - Bilge Keel Damping - MJ Van Kampen 08-05-2015Document86 paginiLiterature Review - Bilge Keel Damping - MJ Van Kampen 08-05-2015Ding LiuÎncă nu există evaluări
- 1st Puc Physics Chapter12-Thermodynamics Notes by U N SwamyDocument10 pagini1st Puc Physics Chapter12-Thermodynamics Notes by U N Swamyashwinikumari bÎncă nu există evaluări
- Femtosecond Picosecond and Nanosecond Laser Ablation of SolidsDocument7 paginiFemtosecond Picosecond and Nanosecond Laser Ablation of SolidsMusa Morena Marcusso ManhãesÎncă nu există evaluări
- EXP 7 Pipe FrictionDocument10 paginiEXP 7 Pipe Frictionsiva ramÎncă nu există evaluări
- Allen - 11th Full SyllabusDocument52 paginiAllen - 11th Full SyllabusMridula PriyaÎncă nu există evaluări
- List of Definition For SPM PhysicsDocument11 paginiList of Definition For SPM PhysicsRyan KerkÎncă nu există evaluări
- Laser Types-Lecture (Dr. M Fadhali)Document29 paginiLaser Types-Lecture (Dr. M Fadhali)Mohamed Fadhali100% (1)
- Smearing TechniqueDocument10 paginiSmearing TechniqueOSCARDELTAÎncă nu există evaluări
- HERFLEX HF-50-180 - EnglishDocument2 paginiHERFLEX HF-50-180 - Englishlaroussi aymenÎncă nu există evaluări
- Considerations For Design of Concrete Structures Subjected To Fatigue LoadingDocument25 paginiConsiderations For Design of Concrete Structures Subjected To Fatigue LoadingMr Polash100% (1)
- Rotating Machinery 3d TutorialDocument14 paginiRotating Machinery 3d Tutorialأسامةبوعزيز100% (1)
- University of Cape TownDocument154 paginiUniversity of Cape TownDavis EscalonaÎncă nu există evaluări
- Determination of Drop-Impact Resistance of Plastic BottlesDocument11 paginiDetermination of Drop-Impact Resistance of Plastic BottlesAndres BrañaÎncă nu există evaluări
- Jee Main 25 Jan 2023 Shift 1 Physics Memory Based Paper Solution - PHPDocument12 paginiJee Main 25 Jan 2023 Shift 1 Physics Memory Based Paper Solution - PHPSiddhant KaushikÎncă nu există evaluări
- Flushing WhitepaperDocument2 paginiFlushing WhitepaperrajaramonÎncă nu există evaluări
- Chapter 1: Fourier Equation and Thermal ConductivityDocument19 paginiChapter 1: Fourier Equation and Thermal ConductivityDiptoÎncă nu există evaluări
- Design and Analysis For Wind LoadsDocument102 paginiDesign and Analysis For Wind LoadsSabih Hashim AlzuhairyÎncă nu există evaluări