S-ar putea să vă placă și
- Mobile Network Optimization: A Guide for 2G and 3G Mobile Network OptimizationDe la EverandMobile Network Optimization: A Guide for 2G and 3G Mobile Network OptimizationEvaluare: 3.5 din 5 stele3.5/5 (3)
- NI CaseStudy Mobile Robot Tricycle / OmnidirectionalDocument8 paginiNI CaseStudy Mobile Robot Tricycle / OmnidirectionalMichael MaysÎncă nu există evaluări
- Communication System For On Board Data Telemetry To Ground.Document26 paginiCommunication System For On Board Data Telemetry To Ground.Engr Waqar Ahmed RajputÎncă nu există evaluări
- Chapter FiveDocument4 paginiChapter FivebezawitÎncă nu există evaluări
- Fully Automated Toll Tax Collection Using RF Technology. No Need To Stop Car On Toll GateDocument21 paginiFully Automated Toll Tax Collection Using RF Technology. No Need To Stop Car On Toll GatePraveen Kumar PrajapatiÎncă nu există evaluări
- Project Lan 2Document49 paginiProject Lan 2Sushobhan BhargavÎncă nu există evaluări
- DTMF Controlled RobotDocument24 paginiDTMF Controlled RobotJoel George AlexÎncă nu există evaluări
- ENGG3800 2011 SpecDocument4 paginiENGG3800 2011 SpechahaqqqÎncă nu există evaluări
- Be Mech Final Project On Key Controlled ForklifterDocument42 paginiBe Mech Final Project On Key Controlled ForklifterSandesh Likhar100% (1)
- Velammal Institute of Technology Chennai: V.SathishDocument26 paginiVelammal Institute of Technology Chennai: V.SathishShubhuÎncă nu există evaluări
- Symbol Synchronizer For Software Defined Radio (SDR) : Pravin PatilDocument11 paginiSymbol Synchronizer For Software Defined Radio (SDR) : Pravin PatilitrajÎncă nu există evaluări
- A Line Follower Robot From Design To Implementation - Technical Issues and ProblemsDocument5 paginiA Line Follower Robot From Design To Implementation - Technical Issues and ProblemsAhmad AfnanÎncă nu există evaluări
- RC Unit r3msDocument3 paginiRC Unit r3msMatthew ShinsatoÎncă nu există evaluări
- Fully Automated Toll Tax Collection Using RF Technology. No Need To Stop Car On Toll GateDocument13 paginiFully Automated Toll Tax Collection Using RF Technology. No Need To Stop Car On Toll GateHimanshu SharmaÎncă nu există evaluări
- Lab 4Document7 paginiLab 4Malik YousafÎncă nu există evaluări
- Cell Phone Operated Land Rover/toy CarDocument46 paginiCell Phone Operated Land Rover/toy Caranshul_all50% (2)
- The Flexible Bus Systems Using Zigbee As A Communication MediumDocument29 paginiThe Flexible Bus Systems Using Zigbee As A Communication MediumVinay ReddyÎncă nu există evaluări
- Net Operated Land Rover: Hemant C, Ajay V, Shyamal L, Mayuri KDocument4 paginiNet Operated Land Rover: Hemant C, Ajay V, Shyamal L, Mayuri Kneekey17Încă nu există evaluări
- Fire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologyDocument13 paginiFire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologypraveenaÎncă nu există evaluări
- Fire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologyDocument13 paginiFire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologypraveenaÎncă nu există evaluări
- MSI CEP Lab Project Report Final Version Report...Document23 paginiMSI CEP Lab Project Report Final Version Report...ghazi abbasÎncă nu există evaluări
- Micro Controller Based RF Rbotic CarDocument66 paginiMicro Controller Based RF Rbotic CarPradeep VermaÎncă nu există evaluări
- PC Controlled RobotDocument51 paginiPC Controlled RobotmahammadvasimkÎncă nu există evaluări
- Proposal Micro ProcessorDocument13 paginiProposal Micro ProcessorZakwan JohariÎncă nu există evaluări
- Embed Ed ProjectDocument22 paginiEmbed Ed Projectsunil_kumar0791Încă nu există evaluări
- Gps Machine GuidanceDocument9 paginiGps Machine GuidanceSky FallÎncă nu există evaluări
- Cerebro de Un RobotDocument8 paginiCerebro de Un RobotbrunorafoÎncă nu există evaluări
- 30.IJAEST Vol No 7 Issue No 2 An Intelligent Mobile Robot Navigation Technique Using RFID Technology 356 364Document10 pagini30.IJAEST Vol No 7 Issue No 2 An Intelligent Mobile Robot Navigation Technique Using RFID Technology 356 364helpdesk9532Încă nu există evaluări
- Ultrasonic Car ParkingDocument7 paginiUltrasonic Car Parkingxpeprishey100% (3)
- A Fuzzy Logic Control Project For A Real-Time Microprocessor LaboratoryDocument6 paginiA Fuzzy Logic Control Project For A Real-Time Microprocessor LaboratoryZelalem TarekegnÎncă nu există evaluări
- Technical Course SmartPTT Essentials and Basic ConfigurationsDocument118 paginiTechnical Course SmartPTT Essentials and Basic ConfigurationslocosÎncă nu există evaluări
- Journal Paper For Smart Lawn Mower With Stability Control Using AVR ControllerDocument6 paginiJournal Paper For Smart Lawn Mower With Stability Control Using AVR ControllerJûֆtíñéÎncă nu există evaluări
- ZigbeebaseddcmotorsremotemonitoringandcontrolDocument21 paginiZigbeebaseddcmotorsremotemonitoringandcontrolSiva RanjaniÎncă nu există evaluări
- Remote Operated Fork Lift Btech Be Mechanical Final ReportDocument43 paginiRemote Operated Fork Lift Btech Be Mechanical Final Reportmagadheera05Încă nu există evaluări
- GPS Vehicle TrackDocument132 paginiGPS Vehicle TrackKarthik DmÎncă nu există evaluări
- 112638Document36 pagini112638NANTHINI PRIYA J 215111073Încă nu există evaluări
- Cell Phone Operated Land RoverDocument11 paginiCell Phone Operated Land RoverUtsav Suresh PanchalÎncă nu există evaluări
- Cell Phone Operated Land Rover: Pranveer Singh Institute of TechnologyDocument12 paginiCell Phone Operated Land Rover: Pranveer Singh Institute of Technologypannu9Încă nu există evaluări
- Final Career Episode ModelDocument48 paginiFinal Career Episode Modelom98474831879339Încă nu există evaluări
- Set 133wireless Stepper Motor Control Using RF CommunicationDocument4 paginiSet 133wireless Stepper Motor Control Using RF CommunicationKamasani PraveenaÎncă nu există evaluări
- Vector Communication Lab VCL04Document4 paginiVector Communication Lab VCL04Amit SharmaÎncă nu există evaluări
- Wind Band Radar Signal Using RF2051Document8 paginiWind Band Radar Signal Using RF2051Khushal KharadeÎncă nu există evaluări
- Digital Position Control For Analog Servos: Sven Behnke and Michael SchreiberDocument5 paginiDigital Position Control For Analog Servos: Sven Behnke and Michael SchreiberJavier Jair Trejo GarcíaÎncă nu există evaluări
- Segway: School of Electronics EngineeringDocument17 paginiSegway: School of Electronics EngineeringSMÎncă nu există evaluări
- Wireless Elevator Remote Control: Patrick Goh Hamed Asghari ECE 445Document7 paginiWireless Elevator Remote Control: Patrick Goh Hamed Asghari ECE 445Vikas S PatelÎncă nu există evaluări
- Parking Garage Management and Parking Assistance DeviceDocument25 paginiParking Garage Management and Parking Assistance DeviceMoata GirmaÎncă nu există evaluări
- RF Controlled Spy Robot With Night Vision CameraDocument7 paginiRF Controlled Spy Robot With Night Vision CameraNikhil GaidhaneÎncă nu există evaluări
- Prosiding Paper 2010 EditDocument4 paginiProsiding Paper 2010 EditNizam RashidÎncă nu există evaluări
- 8 Weeks Industrial Training From Aircom Internationals in Introduction To GSM & RF ToolsDocument86 pagini8 Weeks Industrial Training From Aircom Internationals in Introduction To GSM & RF ToolsSushmita KoulÎncă nu există evaluări
- Pavani Mini Project - 115817Document23 paginiPavani Mini Project - 115817Yelagum RahulÎncă nu există evaluări
- Gesture Recognition and Voice Control On DevicesDocument8 paginiGesture Recognition and Voice Control On DevicesCharith R RameshÎncă nu există evaluări
- Pulse-Modulated Radar Display Processor On A ChipDocument10 paginiPulse-Modulated Radar Display Processor On A ChipBeverly MercadoÎncă nu există evaluări
- 1 Realtime Vehicle Tracking System BDocument15 pagini1 Realtime Vehicle Tracking System BKarthi Moorthy100% (1)
- Main PPT Speed Control System With Rfid Equipped VehicleDocument27 paginiMain PPT Speed Control System With Rfid Equipped VehiclePraveen Kumar80% (10)
- Icdv-2011Document6 paginiIcdv-2011thuanhoang70Încă nu există evaluări
- Cellphone Operated Landrover: Presented By-Santosh Jaybhaye Rakesh Kumar Sitesh SinghDocument10 paginiCellphone Operated Landrover: Presented By-Santosh Jaybhaye Rakesh Kumar Sitesh SinghHitesh ShelkeÎncă nu există evaluări
- A Line Follower Robot-ICCAE 2010Document6 paginiA Line Follower Robot-ICCAE 2010Ioan DorofteiÎncă nu există evaluări
- Wireless Polling Method Using RFDocument101 paginiWireless Polling Method Using RFSravani SravzÎncă nu există evaluări
- 9 IjecsDocument5 pagini9 IjecsRamsathayaÎncă nu există evaluări
- Edge Brochure For PrintDocument4 paginiEdge Brochure For Printelangperwira100% (1)
- Sommer Traffic BarriersDocument8 paginiSommer Traffic BarrierssaberÎncă nu există evaluări
- Solution Brief Off Air Repeater (PublicRelease) FinalDocument2 paginiSolution Brief Off Air Repeater (PublicRelease) FinalCyrille N'GUESSANÎncă nu există evaluări
- Iphone 6 Plus 5.5'' 820-3675 051-0517 N56 MLB Rev 6.0.0 - 05.09.2014 Schematic DiagramDocument55 paginiIphone 6 Plus 5.5'' 820-3675 051-0517 N56 MLB Rev 6.0.0 - 05.09.2014 Schematic DiagramJose Perez GarciaÎncă nu există evaluări
- Panasonic SC Ak960 Manual de UsuarioDocument28 paginiPanasonic SC Ak960 Manual de UsuarioJorgeÎncă nu există evaluări
- Instrumentation II Handwritten NotesDocument252 paginiInstrumentation II Handwritten NotesAmrit SapkotaÎncă nu există evaluări
- B39a Rrh8x10 Uzfb SPDocument72 paginiB39a Rrh8x10 Uzfb SPNicolás RuedaÎncă nu există evaluări
- Kns Introduction - 2018 - (Including 10 Ulv)Document39 paginiKns Introduction - 2018 - (Including 10 Ulv)Facundo San FeliceÎncă nu există evaluări
- 150 - 174 MHZ & 220 - 222 MHZ / 9.5 DBD Gain: Yagi AntennaDocument1 pagină150 - 174 MHZ & 220 - 222 MHZ / 9.5 DBD Gain: Yagi AntennaLeon ScottÎncă nu există evaluări
- DB858DG90ESYDocument3 paginiDB858DG90ESYОлександр ЧугайÎncă nu există evaluări
- RVV-33B-R3: General SpecificationsDocument4 paginiRVV-33B-R3: General SpecificationsJulian Andres VictoriaÎncă nu există evaluări
- Ther Heck: E NDEDocument8 paginiTher Heck: E NDEshahbaz akramÎncă nu există evaluări
- A) The Point Where The Orbit Crosses The Equatorial Plane Going From South To NorthDocument2 paginiA) The Point Where The Orbit Crosses The Equatorial Plane Going From South To Northsomething creativeÎncă nu există evaluări
- Business Communication and Report Writing NotesDocument49 paginiBusiness Communication and Report Writing NotesZINTLEÎncă nu există evaluări
- Carrier Aggregation (CA) TechnologyDocument5 paginiCarrier Aggregation (CA) TechnologyAung Aung OoÎncă nu există evaluări
- SporTrak Series Manual (English)Document86 paginiSporTrak Series Manual (English)MainStSupply100% (2)
- LawsDocument2 paginiLawsVal andrei DevezaÎncă nu există evaluări
- Antena 800TVDocument1 paginăAntena 800TVJhon Alex SanchezÎncă nu există evaluări
- Nokia AirscaleDocument88 paginiNokia AirscaleAntonis Tsiflikiotis67% (3)
- BJO135 Macro L900 EJDocument6 paginiBJO135 Macro L900 EJAbdiel Rasyid FarendraÎncă nu există evaluări
- Wearable Antena BalanisDocument4 paginiWearable Antena BalanisTambor Sirait100% (1)
- List of RF Connector TypesDocument5 paginiList of RF Connector Typessabo6181Încă nu există evaluări
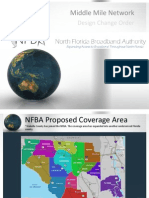
- NFBA Orginal Change Order PresentationDocument12 paginiNFBA Orginal Change Order PresentationTom StallingsÎncă nu există evaluări
- RRU5258 Description B38 - 2600MHzDocument41 paginiRRU5258 Description B38 - 2600MHzVanessa PerezÎncă nu există evaluări
- EMI-EMC For Military Aircrafts and Its ChallengesDocument7 paginiEMI-EMC For Military Aircrafts and Its Challengeskvk808Încă nu există evaluări
- AM Diode ModulatorDocument3 paginiAM Diode ModulatorAnonymous LsbuQJi2A9100% (2)
- CMN511 RW1Document22 paginiCMN511 RW1Sean Matthew L. OcampoÎncă nu există evaluări
- Tailless AircraftDocument17 paginiTailless AircraftVikasVickyÎncă nu există evaluări
- Fire Safety Operational BookletDocument32 paginiFire Safety Operational BookletOzan Oğuz83% (6)
- Frendx. ,,, ,,., I: ISSN 0160 - 1989Document60 paginiFrendx. ,,, ,,., I: ISSN 0160 - 1989Kasi XswlÎncă nu există evaluări