S-ar putea să vă placă și
- Toyota Serie8Document38 paginiToyota Serie8Jaime Flórez0% (1)
- Power Shift Transmission Testing and Adjusting.Document13 paginiPower Shift Transmission Testing and Adjusting.David Mercado100% (1)
- Lindsay Technical Books Last CatalogDocument75 paginiLindsay Technical Books Last Catalogkjdhjodhuihhhhhuu100% (8)
- Monorail - Aisc 2005 - Bs2853-Rev-11 1ton CapacityDocument74 paginiMonorail - Aisc 2005 - Bs2853-Rev-11 1ton CapacityRAMSINGH CHAUHANÎncă nu există evaluări
- D85ESS-2: Rawler OzerDocument12 paginiD85ESS-2: Rawler OzerLuqman Cuopreakt'zÎncă nu există evaluări
- AE20/BE20: SeriesDocument7 paginiAE20/BE20: SeriesPatricio Acuña0% (1)
- Pines MP7Document11 paginiPines MP7Jose MarotoÎncă nu există evaluări
- Electrical Installation Labour ChargesDocument4 paginiElectrical Installation Labour ChargessisnaingaungÎncă nu există evaluări
- Ecp-4083935oampmecpg PDFDocument100 paginiEcp-4083935oampmecpg PDFP.p. Arul Ilancheeran100% (1)
- Impco 425 CarburetorDocument6 paginiImpco 425 Carburetors_boots100% (2)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDe la EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsÎncă nu există evaluări
- Operator'S Manual Controller R-30iBDocument25 paginiOperator'S Manual Controller R-30iBZied RaouakÎncă nu există evaluări
- Series: Operator'S ManualDocument152 paginiSeries: Operator'S ManualZied Raouak100% (1)
- D11R Power Train PDFDocument38 paginiD11R Power Train PDFChakroune100% (2)
- Rectangular Column Design SpreadsheetDocument1 paginăRectangular Column Design SpreadsheetBikram92Încă nu există evaluări
- Compresor Campbell VT6395-ManualDocument66 paginiCompresor Campbell VT6395-ManualUlises MarceloÎncă nu există evaluări
- Belt ConveyorDocument13 paginiBelt ConveyorDha'z SuiiciderzÎncă nu există evaluări
- Column Splice Connection (In-Situ)Document2 paginiColumn Splice Connection (In-Situ)Nitesh Singh100% (1)
- 8FG-8FD (Catalog) (E-Book) 1475745227 PDFDocument8 pagini8FG-8FD (Catalog) (E-Book) 1475745227 PDFMamas SoimÎncă nu există evaluări
- Spreadsheets To BS 8110: Internal ColumnDocument12 paginiSpreadsheets To BS 8110: Internal ColumnCioabla BogdanÎncă nu există evaluări
- FANUC Series: Operator'S ManualDocument104 paginiFANUC Series: Operator'S ManualZied RaouakÎncă nu există evaluări
- Experimental Seismic Assessment of Full Scale Non-Seismically Detailed RC Structure by Pushover MethodDocument9 paginiExperimental Seismic Assessment of Full Scale Non-Seismically Detailed RC Structure by Pushover MethodraihanÎncă nu există evaluări
- IJMAL FT MM 03 Weekly Check ListDocument1 paginăIJMAL FT MM 03 Weekly Check Listdeltravel7Încă nu există evaluări
- Component Code BT03011B D8: Printed in Japan (02) 1Document10 paginiComponent Code BT03011B D8: Printed in Japan (02) 1Jose A. Basanta H.Încă nu există evaluări
- Operation Manual LC-10EDocument12 paginiOperation Manual LC-10EKevin CaballeroÎncă nu există evaluări
- Tugas BalokDocument12 paginiTugas Balokilham kartikoÎncă nu există evaluări
- Actuators Complet RDocument44 paginiActuators Complet RAhmed ElkashifÎncă nu există evaluări
- Responses of Base-Isolated Buildings in Tokyo During The 2011 Great East Japan EarthquakeDocument10 paginiResponses of Base-Isolated Buildings in Tokyo During The 2011 Great East Japan EarthquakeShishir BhattaraiÎncă nu există evaluări
- SECTION 700X700 - 3.5mDocument6 paginiSECTION 700X700 - 3.5mloc khaÎncă nu există evaluări
- Concrete Design: Project Job Number EngineerDocument1 paginăConcrete Design: Project Job Number Engineermang juhaiÎncă nu există evaluări
- KP0800 Te PDFDocument8 paginiKP0800 Te PDFisaac grossiÎncă nu există evaluări
- ZF Servoplan PG Catalog Rev DDocument20 paginiZF Servoplan PG Catalog Rev Dinnova115Încă nu există evaluări
- Spreadsheets To BS 8110: Internal ColumnDocument10 paginiSpreadsheets To BS 8110: Internal ColumnMohammad Twaha JaumbocusÎncă nu există evaluări
- Apollo Rack & Pinion Pneumatic ActuatorDocument10 paginiApollo Rack & Pinion Pneumatic ActuatorDelta ProductionÎncă nu există evaluări
- Fixadores BWFDocument10 paginiFixadores BWFcaio.gassnerÎncă nu există evaluări
- TB - 2023 - 01 - CATERPILLAR PC4000 - Rev00 - (12 - 12 - 2023)Document12 paginiTB - 2023 - 01 - CATERPILLAR PC4000 - Rev00 - (12 - 12 - 2023)freddyÎncă nu există evaluări
- Catalogue MF SulzerDocument4 paginiCatalogue MF SulzerRaymond GanÎncă nu există evaluări
- Spreadsheets To BS 8110: Column InternalDocument1 paginăSpreadsheets To BS 8110: Column InternalmayphyoÎncă nu există evaluări
- Engine Unit Reassembly-1Document33 paginiEngine Unit Reassembly-1Mr KayÎncă nu există evaluări
- 8series - Catalog e 090722 1Document8 pagini8series - Catalog e 090722 1suranga yapaÎncă nu există evaluări
- IFS Stancor SEW50 DatasheetDocument2 paginiIFS Stancor SEW50 DatasheetMaruRojaÎncă nu există evaluări
- Manual Carro ElectricoDocument2 paginiManual Carro ElectricoGONZALO RIVERA ORELLANAÎncă nu există evaluări
- Longitudinal Beam Shear ConnectionsDocument6 paginiLongitudinal Beam Shear Connectionsraghav abudhabiÎncă nu există evaluări
- 2TG - (Catalog) Towing Tractor EngineDocument4 pagini2TG - (Catalog) Towing Tractor EngineAhmad FirdausÎncă nu există evaluări
- Section A: (Attached: BS 8110/1 CL 3.6 BS 8110/2 CL 4.2)Document21 paginiSection A: (Attached: BS 8110/1 CL 3.6 BS 8110/2 CL 4.2)Puneetkumar GargÎncă nu există evaluări
- Takahashi t98Document10 paginiTakahashi t98Angga Fajar SetiawanÎncă nu există evaluări
- Circular Column Design - MPA-ECDocument1 paginăCircular Column Design - MPA-ECmayphyoÎncă nu există evaluări
- Uitm Cawangan Selangor, Kampus Sungai Buloh - Medical FacultyDocument7 paginiUitm Cawangan Selangor, Kampus Sungai Buloh - Medical FacultyShahrirÎncă nu există evaluări
- Sidermat: Handle Key Interlocking AccessoriesDocument1 paginăSidermat: Handle Key Interlocking Accessoriesskipina74Încă nu există evaluări
- SCR4016 说明书Document104 paginiSCR4016 说明书kc chanÎncă nu există evaluări
- Yanmar SD40, SD40-4T, SD50-4T, SD50Document22 paginiYanmar SD40, SD40-4T, SD50-4T, SD50David dounaiÎncă nu există evaluări
- Continuous BeamDocument29 paginiContinuous BeamZakwan ZakariaÎncă nu există evaluări
- Catalog - 8FD-8FG Toyota Engine ForkliftDocument8 paginiCatalog - 8FD-8FG Toyota Engine ForkliftKen WalschÎncă nu există evaluări
- RCC13 Punching ShearDocument11 paginiRCC13 Punching ShearMatumbi NaitoÎncă nu există evaluări
- AM120iB Robots InstallDocument4 paginiAM120iB Robots Installarmando martinezÎncă nu există evaluări
- Кільця поршневіDocument2 paginiКільця поршневіihor.rudyk.mmeba.2022Încă nu există evaluări
- Rectification Proposal For Ecc Pile: Untuk: Tetuan CGH Industry SDN BHDDocument14 paginiRectification Proposal For Ecc Pile: Untuk: Tetuan CGH Industry SDN BHDTom YeeÎncă nu există evaluări
- Ec210b Track Shoe Tighen ToughDocument3 paginiEc210b Track Shoe Tighen ToughKevin Tang Wan FungÎncă nu există evaluări
- Axial Position of Rotors Service Engineering Number SEBDocument5 paginiAxial Position of Rotors Service Engineering Number SEBDAVID TOYOÎncă nu există evaluări
- Esp. Bomba Do MotorDocument3 paginiEsp. Bomba Do MotorflavioÎncă nu există evaluări
- Bending Schedule - Add ExampleDocument3 paginiBending Schedule - Add ExampleMotlatsi JosephÎncă nu există evaluări
- HS FSW01 00000088aec - CDocument5 paginiHS FSW01 00000088aec - CMarcoÎncă nu există evaluări
- 7FB10 7FB14: Main Vehicle SpecificationsDocument40 pagini7FB10 7FB14: Main Vehicle SpecificationsCan DraÎncă nu există evaluări
- Electrical Pump PDFDocument28 paginiElectrical Pump PDFSalman SaifuddinÎncă nu există evaluări
- Roll Trim - Maintenance PracticesDocument15 paginiRoll Trim - Maintenance Practicesron.bentonÎncă nu există evaluări
- Low Cost & High Performance Casing ConnectionDocument4 paginiLow Cost & High Performance Casing ConnectionMd ExpatÎncă nu există evaluări
- Gear Group (Front) - Install - Idler Gear Only: Desmontagem e MontagemDocument6 paginiGear Group (Front) - Install - Idler Gear Only: Desmontagem e MontagemJose nildo lobato Mendes MendesÎncă nu există evaluări
- Design of Reinforced Concrete Elements: UsingDocument62 paginiDesign of Reinforced Concrete Elements: UsingISsa Qafa'itiÎncă nu există evaluări
- F2 Manual Transmission/Manual Transaxle: To IndexDocument21 paginiF2 Manual Transmission/Manual Transaxle: To IndexKwun Hok ChongÎncă nu există evaluări
- Juki MH-38Document20 paginiJuki MH-38SilasÎncă nu există evaluări
- 40VCT CatalogDocument2 pagini40VCT CatalogSreejil RaveendranÎncă nu există evaluări
- Maintenance Area: 1.transportation and InstallationDocument1 paginăMaintenance Area: 1.transportation and InstallationZied RaouakÎncă nu există evaluări
- Robot Configuration PDFDocument9 paginiRobot Configuration PDFZied RaouakÎncă nu există evaluări
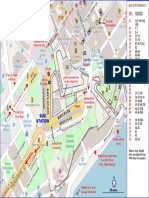
- Malta Principal Bus Services - Spring2016Document1 paginăMalta Principal Bus Services - Spring2016Zied RaouakÎncă nu există evaluări
- Map 2019 02 VallettaDocument1 paginăMap 2019 02 VallettaZied RaouakÎncă nu există evaluări
- Fix The Errors in Writing of FANUC Robot Series R-30 FL-net Interface OPERATOR'S MANUALDocument2 paginiFix The Errors in Writing of FANUC Robot Series R-30 FL-net Interface OPERATOR'S MANUALZied RaouakÎncă nu există evaluări
- iRVision Visual Linetracking Manual (Ver.7.50) (B-82774EN-2 03) (Update1) PDFDocument3 paginiiRVision Visual Linetracking Manual (Ver.7.50) (B-82774EN-2 03) (Update1) PDFZied RaouakÎncă nu există evaluări
- Addition To Fanuc Robot Series R-30Ia Controller Irvision Operator'S ManualDocument11 paginiAddition To Fanuc Robot Series R-30Ia Controller Irvision Operator'S ManualZied RaouakÎncă nu există evaluări
- ProfiNet Operator Manual (Addendum Firmware 2.3.1) (NCM Setup Controller&device)Document1 paginăProfiNet Operator Manual (Addendum Firmware 2.3.1) (NCM Setup Controller&device)Zied RaouakÎncă nu există evaluări
- Front Suspension - Basic Suspension, ServicingDocument20 paginiFront Suspension - Basic Suspension, ServicingEttore ScolaÎncă nu există evaluări
- Ae Lab ManualDocument48 paginiAe Lab Manualसंकेत कलगुटकर100% (1)
- Types of Shafts: 1. Transmission Shafts. These Shafts Transmit PowerDocument9 paginiTypes of Shafts: 1. Transmission Shafts. These Shafts Transmit PowerTheod S. VilaÎncă nu există evaluări
- 6 Gear TrainDocument3 pagini6 Gear TrainAnuj ThakkarÎncă nu există evaluări
- 2021 Flow Binding Change SnaplockDocument1 pagină2021 Flow Binding Change SnaplockLeÎncă nu există evaluări
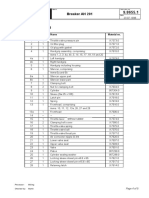
- Breaker AH 201: Item Quan-Tity Name Material NoDocument2 paginiBreaker AH 201: Item Quan-Tity Name Material NoPappa Anton FlorinÎncă nu există evaluări
- PompaDocument230 paginiPompaDodi SuhendraÎncă nu există evaluări
- RTHB 215-450: Helirotor Compressor Liquid Chillers 620 To 1370 KWDocument1 paginăRTHB 215-450: Helirotor Compressor Liquid Chillers 620 To 1370 KWMohamed MohamedÎncă nu există evaluări
- 5.5-9KW Gasoline Emergency Generator Quo...Document1 pagină5.5-9KW Gasoline Emergency Generator Quo...Süleyman YalavacÎncă nu există evaluări
- Doosan 225LL Hydraulic PDFDocument1 paginăDoosan 225LL Hydraulic PDFHector bustosÎncă nu există evaluări
- Manual Manutenção Guincho WarnDocument35 paginiManual Manutenção Guincho WarnAnderson K LimaÎncă nu există evaluări
- Walbro DiafragmDocument34 paginiWalbro DiafragmpitulusaÎncă nu există evaluări
- York Water Cooled Pacakged YBW SeriesDocument5 paginiYork Water Cooled Pacakged YBW Seriespalitha1902100% (1)
- 2013 JUPITER-Z1 1M1DY460EA Rev1 PDFDocument57 pagini2013 JUPITER-Z1 1M1DY460EA Rev1 PDFmomo0% (1)
- Vanagon 1983-1984Document6 paginiVanagon 1983-1984Jose RomeroÎncă nu există evaluări
- List of Abbreviations:: Alpha Lubricator SystemDocument71 paginiList of Abbreviations:: Alpha Lubricator SystemshashishekharsinghÎncă nu există evaluări
- Ad-212-Raq-Dwg-Dd-Mec-000002 - 01 - Detailed Design Drawing For Hvac SystemDocument14 paginiAd-212-Raq-Dwg-Dd-Mec-000002 - 01 - Detailed Design Drawing For Hvac Systembassels929Încă nu există evaluări
- DGV 275 ST: 1. General Technical DataDocument12 paginiDGV 275 ST: 1. General Technical Dataابرار عمرÎncă nu există evaluări
- Chapter 7 Induction Machines-EEE301Document96 paginiChapter 7 Induction Machines-EEE301DilekÎncă nu există evaluări
- APE Diesel Hammer Check List: Date: - Sales Order Number: - APE S/NDocument1 paginăAPE Diesel Hammer Check List: Date: - Sales Order Number: - APE S/NPiphith ZhiypVaraÎncă nu există evaluări
- WV90S111GBDocument3 paginiWV90S111GBAlexanderÎncă nu există evaluări
- Upgrade The CRD Laboratories 1. Utilities: Ground FloorDocument4 paginiUpgrade The CRD Laboratories 1. Utilities: Ground FloorYawar QureshiÎncă nu există evaluări