S-ar putea să vă placă și
- Devuelvanmeamiperro JirafonjirafinaDocument16 paginiDevuelvanmeamiperro JirafonjirafinaDn LeÎncă nu există evaluări
- La Incertidumbre y La Subjetividad en La Toma deDocument17 paginiLa Incertidumbre y La Subjetividad en La Toma deRodolfo Quijada100% (1)
- UPAODocument7 paginiUPAODiego Ernesto Pasapera Montalbán0% (1)
- La Formula Mas Bella (Pedro Roses)Document283 paginiLa Formula Mas Bella (Pedro Roses)Josep Solé Mir100% (1)
- 230-1185-2-PB Artículo Claudia e Amezquita Uptc UlaDocument19 pagini230-1185-2-PB Artículo Claudia e Amezquita Uptc UlaClaudia AmezquitaÎncă nu există evaluări
- Datos No Agrupados - MatemáticasDocument7 paginiDatos No Agrupados - MatemáticasMARICARMEN PEREZ HUERTAÎncă nu există evaluări
- Ejercicios E-Calculo IntegralDocument10 paginiEjercicios E-Calculo IntegralAngelica MartinezÎncă nu există evaluări
- VectoresDocument6 paginiVectoresRudy EstradaÎncă nu există evaluări
- MatematicasDocument2 paginiMatematicasMariola Peribáñez de DiegoÎncă nu există evaluări
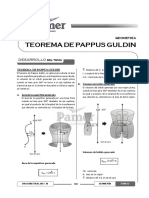
- Teorema de Pappus GuldingDocument2 paginiTeorema de Pappus GuldingAnonymous phAIWgucDtÎncă nu există evaluări
- Sol T2Document2 paginiSol T2Brenda CruzÎncă nu există evaluări
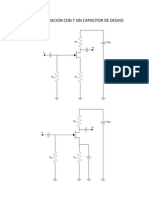
- Autopolarizacion Con y Sin Capacitor de DesvioDocument13 paginiAutopolarizacion Con y Sin Capacitor de DesvioLuis AcevedoÎncă nu există evaluări
- Esquema de Estudios Matemáticas Nivel MedioDocument17 paginiEsquema de Estudios Matemáticas Nivel MedioLuisão Almache Cabrera100% (1)
- 2-De Derivadas Parciales y DiferenciabilidadDocument1 pagină2-De Derivadas Parciales y DiferenciabilidadTanays SanchezÎncă nu există evaluări
- MatricesDocument6 paginiMatricesFrank SDÎncă nu există evaluări
- JP PPT s5 Ecuaciones LinealesDocument38 paginiJP PPT s5 Ecuaciones LinealesGladys Esperanza SalvadorÎncă nu există evaluări
- Enseñanza de Matematicas de Calidad Ccesa007Document14 paginiEnseñanza de Matematicas de Calidad Ccesa007Demetrio Ccesa RaymeÎncă nu există evaluări
- 6° Grado - Experiencia de Aprendizaje N°07Document27 pagini6° Grado - Experiencia de Aprendizaje N°07HebertBlancoZevallosÎncă nu există evaluări
- Clase 16Document17 paginiClase 16richardÎncă nu există evaluări
- Estadisticas Descriptiva.Document43 paginiEstadisticas Descriptiva.Henry LazaroÎncă nu există evaluări
- 1°#cinemática MruDocument12 pagini1°#cinemática Mruteradata059129100% (2)
- Ilustracion Grafica de ProblemasDocument4 paginiIlustracion Grafica de ProblemasErick CastilloÎncă nu există evaluări
- InformeDocument11 paginiInformecarolina guamanquispeÎncă nu există evaluări
- Practica de Ecuaciones Cpu 2023-2Document2 paginiPractica de Ecuaciones Cpu 2023-2Maycol Janns Quispe ValdezÎncă nu există evaluări
- EstadOFE - POD - WebDocument5 paginiEstadOFE - POD - WebMaroua SlimaniÎncă nu există evaluări
- Calculo Vectorial Tema 5Document19 paginiCalculo Vectorial Tema 5raulÎncă nu există evaluări
- Circunferencia para Primero de SecundariaDocument6 paginiCircunferencia para Primero de Secundariacarlos velaÎncă nu există evaluări
- Números y OperacionesDocument20 paginiNúmeros y OperacionesluzÎncă nu există evaluări
- Práctica N°4 - Exposición - VALLE GRANDADocument16 paginiPráctica N°4 - Exposición - VALLE GRANDAJorge Leiva GonzalesÎncă nu există evaluări
- Practico 03Document3 paginiPractico 03Emiliano GonzalezÎncă nu există evaluări