S-ar putea să vă placă și
- Final ProgramDocument6 paginiFinal Programapi-264125530Încă nu există evaluări
- Full StepDocument3 paginiFull Stepapi-264125530Încă nu există evaluări
- Half StepDocument4 paginiHalf Stepapi-264125530Încă nu există evaluări
- Bidirectional DisplacementDocument3 paginiBidirectional Displacementapi-264125530Încă nu există evaluări
- Measure Coil CurrentsDocument3 paginiMeasure Coil Currentsapi-264125530Încă nu există evaluări
- AccelerometerDocument4 paginiAccelerometerapi-264125530Încă nu există evaluări
- SubwaysurfersDocument1 paginăSubwaysurfersapi-264125530Încă nu există evaluări
- Accelerometer Initial CalibrationDocument3 paginiAccelerometer Initial Calibrationapi-264125530Încă nu există evaluări
- Accelerometer Data CollectionDocument2 paginiAccelerometer Data Collectionapi-264125530Încă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Supor Operation Manual Suporssv1 1b E 131207Document163 paginiSupor Operation Manual Suporssv1 1b E 131207raschid alberto palacios lopezÎncă nu există evaluări
- Electric Baseboard StelproDocument4 paginiElectric Baseboard StelprojrodÎncă nu există evaluări
- Electrical Circuits Course Chapter Series ParallelDocument65 paginiElectrical Circuits Course Chapter Series ParallelAdiba TasneemÎncă nu există evaluări
- Product CatalogueDocument123 paginiProduct CataloguePaola Andrea Osorio GÎncă nu există evaluări
- Service Manual: VOLKSWAGEN Automobile Genuine AM/FM Radio Cassette/ CD StereoDocument24 paginiService Manual: VOLKSWAGEN Automobile Genuine AM/FM Radio Cassette/ CD StereoGB EletronicaÎncă nu există evaluări
- 24AA1025 24LC1025 24FC1025 1024 Kbit I2C Serial EE-2853738Document32 pagini24AA1025 24LC1025 24FC1025 1024 Kbit I2C Serial EE-2853738İbrahim DemircioğluÎncă nu există evaluări
- Power capacitor bank componentsDocument1 paginăPower capacitor bank componentsFarhan ShahÎncă nu există evaluări
- Omega Lighting-Erco Monopoll & Varipoll Linear Cylindrical Systems Catalog 10-86Document44 paginiOmega Lighting-Erco Monopoll & Varipoll Linear Cylindrical Systems Catalog 10-86Alan MastersÎncă nu există evaluări
- ME 442 Mechatronics Semiconductor ElectronicsDocument72 paginiME 442 Mechatronics Semiconductor ElectronicsAlanÎncă nu există evaluări
- Welding Automation: Third EditionDocument80 paginiWelding Automation: Third EditionfkaduÎncă nu există evaluări
- Tilt Switches Mouser IsraelewpbgjokbeDocument2 paginiTilt Switches Mouser Israelewpbgjokbesonhelen26Încă nu există evaluări
- DO1101 - DO1102 - DO1103 - DO1104 Wide Spectrum Smoke Detectors CollectiveDocument16 paginiDO1101 - DO1102 - DO1103 - DO1104 Wide Spectrum Smoke Detectors CollectiveMajid MohammadianÎncă nu există evaluări
- Ancillary ServicesDocument21 paginiAncillary ServicesAndré LuizÎncă nu există evaluări
- Ds PAA3 ENDocument2 paginiDs PAA3 ENAfterpartyeventos Cali JhonsmithÎncă nu există evaluări
- Performance of Dynamometer With Sensor Type Single Bar For Measuring Drive Power of Rotary Friction Welding MachineDocument8 paginiPerformance of Dynamometer With Sensor Type Single Bar For Measuring Drive Power of Rotary Friction Welding MachineAldi muhammad al-muhdarÎncă nu există evaluări
- Autocad Electrical 2012 Learning Autocad Electrical 2012 (Iec Standard)Document1 paginăAutocad Electrical 2012 Learning Autocad Electrical 2012 (Iec Standard)Saikiran SayabugariÎncă nu există evaluări
- Yaesu FT-7800R Operation ManualDocument80 paginiYaesu FT-7800R Operation ManualYayok S. Anggoro100% (1)
- Fan Indent - BHW June15Document4 paginiFan Indent - BHW June15Rajesh TipnisÎncă nu există evaluări
- Project On Ratio AnalysisDocument57 paginiProject On Ratio Analysisc517880% (5)
- Projeto e Construcao de Celula de Carga Instrumentada Com ExtensometrosDocument11 paginiProjeto e Construcao de Celula de Carga Instrumentada Com ExtensometrosTboy SkyghostÎncă nu există evaluări
- PSPICE TutorialDocument24 paginiPSPICE TutorialbjsimardÎncă nu există evaluări
- 004 PDFDocument2 pagini004 PDFdawitÎncă nu există evaluări
- REX 521 Protection Relay: Technical Reference Manual, Standard ConfigurationsDocument224 paginiREX 521 Protection Relay: Technical Reference Manual, Standard Configurationsm khÎncă nu există evaluări
- Canadian-Solar Datasheet Inverter 3ph 75-100KDocument2 paginiCanadian-Solar Datasheet Inverter 3ph 75-100KItaloÎncă nu există evaluări
- Diode PDF ReportDocument20 paginiDiode PDF ReportVipul Sonawane100% (2)
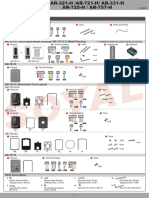
- AR-321-H: Touch-Panel Metal HousingDocument13 paginiAR-321-H: Touch-Panel Metal HousingHan MoreyraÎncă nu există evaluări
- SOUND IMPACT Lights and Sounds (Revised Contract For Wedding at Lakeshore, 102514)Document6 paginiSOUND IMPACT Lights and Sounds (Revised Contract For Wedding at Lakeshore, 102514)Lowela Aileen Limbaring100% (5)
- 30 To 4 AWG Extra Soft Silicone Wire: 深圳市朝溢科技有限公司 Shenzhen Chaoyi Technology Co LtdDocument1 pagină30 To 4 AWG Extra Soft Silicone Wire: 深圳市朝溢科技有限公司 Shenzhen Chaoyi Technology Co LtdAga WassimÎncă nu există evaluări
- M.Tech. VLSI Design (OU) Syllabus I+II+III+IV SemDocument15 paginiM.Tech. VLSI Design (OU) Syllabus I+II+III+IV SemMs. Bhavini KumawatÎncă nu există evaluări
- Th6D Analogue/Digital Interface: Technical Information - Translation of The OriginalDocument25 paginiTh6D Analogue/Digital Interface: Technical Information - Translation of The OriginalArda YazıcıÎncă nu există evaluări