S-ar putea să vă placă și
- EMECDocument73 paginiEMECdivyansh singhÎncă nu există evaluări
- Power Systems TheoryDocument13 paginiPower Systems TheoryGitta JoshuaÎncă nu există evaluări
- Module Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeDocument30 paginiModule Name:Electrical Machine I Module Code: Elt213: by AMAHIRWE Jean ClaudeOmar DjazzoÎncă nu există evaluări
- Chapter-5 Synchronous MacineDocument30 paginiChapter-5 Synchronous MacineAman BazeÎncă nu există evaluări
- Topic 2. DC Machines Part II - DC Motor 2019Document75 paginiTopic 2. DC Machines Part II - DC Motor 2019Lim Kai XuanÎncă nu există evaluări
- Lectures Synchronous MachinesDocument47 paginiLectures Synchronous MachinesJigar PatelÎncă nu există evaluări
- Lecture 5Document45 paginiLecture 5Eric XVEÎncă nu există evaluări
- Synchronous MotorDocument43 paginiSynchronous MotorJanani RangarajanÎncă nu există evaluări
- Elec 4 Synchronous Genrators PPT 2Document37 paginiElec 4 Synchronous Genrators PPT 2Jamir CalÎncă nu există evaluări
- AlternatorsDocument28 paginiAlternatorshs637717Încă nu există evaluări
- CH - 5 Synchronous MachinesDocument28 paginiCH - 5 Synchronous MachinesNAHOM ANTENEHÎncă nu există evaluări
- Unit - IIDocument25 paginiUnit - IIHACKERÎncă nu există evaluări
- Applied Electronics and Electrical MachinesDocument30 paginiApplied Electronics and Electrical MachinesdenÎncă nu există evaluări
- Synchronous Generator PART ADocument34 paginiSynchronous Generator PART ApayalÎncă nu există evaluări
- Lectures 7&8Document59 paginiLectures 7&8Yong Jian RongÎncă nu există evaluări
- Synchronous MachinesDocument17 paginiSynchronous Machinesaswardi8756Încă nu există evaluări
- Ese 2021 (Induction)Document52 paginiEse 2021 (Induction)shaileshÎncă nu există evaluări
- Chapter 2 Synchronous MachinesDocument53 paginiChapter 2 Synchronous MachinesayumailÎncă nu există evaluări
- E M II: Synchronous MachineDocument10 paginiE M II: Synchronous MachineAkashman ShakyaÎncă nu există evaluări
- LEC - 11 (DCM Fundamentals)Document25 paginiLEC - 11 (DCM Fundamentals)zain malikÎncă nu există evaluări
- l6 Machine PDFDocument58 paginil6 Machine PDFmomen ShaheenÎncă nu există evaluări
- Lecture 7 - Synchronous Generators PDFDocument38 paginiLecture 7 - Synchronous Generators PDFMd Rodi BidinÎncă nu există evaluări
- Heydt Synchronous Mach Sep03Document113 paginiHeydt Synchronous Mach Sep03kirjessÎncă nu există evaluări
- Synchronous MachineDocument34 paginiSynchronous Machinefakeacc04aÎncă nu există evaluări
- Week5 Synchronous Machines Lecture Material - With NotesDocument36 paginiWeek5 Synchronous Machines Lecture Material - With NotesAaron AguadoÎncă nu există evaluări
- EM214Synchronousmotor-Chapter 4Document62 paginiEM214Synchronousmotor-Chapter 4mahrusÎncă nu există evaluări
- Electrical - Module 3 - Part 66 - DAY 24Document32 paginiElectrical - Module 3 - Part 66 - DAY 24irene pafraÎncă nu există evaluări
- DC MachinesDocument48 paginiDC Machineskhed100% (1)
- Lectures 9&10Document44 paginiLectures 9&10Yong Jian RongÎncă nu există evaluări
- Synchmachine 1Document68 paginiSynchmachine 1Godlisten NyariÎncă nu există evaluări
- Power and Efficiency in AC Machines: Electrical Power (In or Out) Mechanical Power (In or Out) LossesDocument15 paginiPower and Efficiency in AC Machines: Electrical Power (In or Out) Mechanical Power (In or Out) LossesMohd Taufik SumariÎncă nu există evaluări
- Occ of DC ShuntDocument26 paginiOcc of DC ShuntAnand PalaganiÎncă nu există evaluări
- Prof. Ch. SAI BABU: TopicDocument90 paginiProf. Ch. SAI BABU: TopicAbhimanyu Perumal100% (3)
- Fundamental of Electrical Engineering EMT 113/4 DC MachinesDocument64 paginiFundamental of Electrical Engineering EMT 113/4 DC Machinesluiz pauloÎncă nu există evaluări
- Unit 4. Asynchronous (Or Induction) MachinesDocument40 paginiUnit 4. Asynchronous (Or Induction) MachinesAgustinBenedictoÎncă nu există evaluări
- Unit-1 DC Machines (EMI-Notes)Document34 paginiUnit-1 DC Machines (EMI-Notes)Tushar chauhanÎncă nu există evaluări
- Chapter 5 (Synchoronous Machine)Document77 paginiChapter 5 (Synchoronous Machine)Lij Girmachew Tekel HawariatÎncă nu există evaluări
- 3 Phase MotorDocument26 pagini3 Phase MotorSOBIT KUMARÎncă nu există evaluări
- Machines Enercon 2 PDFDocument42 paginiMachines Enercon 2 PDFChanning TatumÎncă nu există evaluări
- Speed Control of DC Machine: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalDocument73 paginiSpeed Control of DC Machine: Dr. Sushma Gupta Professor Department of Electrical Engineering MANIT, BhopalVenomÎncă nu există evaluări
- Electrical Machines - Synchronous GeneratorDocument29 paginiElectrical Machines - Synchronous GeneratorMuhammad ZarghamÎncă nu există evaluări
- Electrical Machines: Induction Motors - NoteDocument41 paginiElectrical Machines: Induction Motors - NotealeeshaÎncă nu există evaluări
- Adv 1Document74 paginiAdv 1Shani Kumar MandalÎncă nu există evaluări
- Synchronous Generators 1Document50 paginiSynchronous Generators 1api-264713836Încă nu există evaluări
- Synchronous GeneratorDocument28 paginiSynchronous GeneratormohammedÎncă nu există evaluări
- Chapter 10 DC Machine Part 1Document34 paginiChapter 10 DC Machine Part 1Shobanraj LetchumananÎncă nu există evaluări
- Chapt 6. Synchronous MachnieDocument47 paginiChapt 6. Synchronous MachnieHAriÎncă nu există evaluări
- Synchronous MotorsDocument12 paginiSynchronous MotorsKaitlyn StylesÎncă nu există evaluări
- Ehsan Sir - Synchronous MachinesDocument98 paginiEhsan Sir - Synchronous Machinesmdrafadul alamÎncă nu există evaluări
- Eee 205-W1Document24 paginiEee 205-W1mahamudul hasan100% (1)
- Alternators PDFDocument57 paginiAlternators PDFChanning Tatum100% (5)
- Syncgronous Generator UpdatedDocument78 paginiSyncgronous Generator UpdatedarsalÎncă nu există evaluări
- Chapter-5 SlidesDocument50 paginiChapter-5 SlidesdfÎncă nu există evaluări
- Chapter 5 (Synchoronous Machine)Document71 paginiChapter 5 (Synchoronous Machine)eyoule abdiÎncă nu există evaluări
- Lecture 6 Cairo UniversityDocument20 paginiLecture 6 Cairo UniversityWRAIÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Power Electronics 5 - 2017Document22 paginiPower Electronics 5 - 2017FUCKYOUÎncă nu există evaluări
- Uow - Power Electronics 4 - 2017Document25 paginiUow - Power Electronics 4 - 2017FUCKYOUÎncă nu există evaluări
- Uow - Power Electronics 3 - 2020Document14 paginiUow - Power Electronics 3 - 2020FUCKYOUÎncă nu există evaluări
- AC To DC Converters (Uncontrolled) - Diode Rectifiers (Cont.)Document18 paginiAC To DC Converters (Uncontrolled) - Diode Rectifiers (Cont.)FUCKYOUÎncă nu există evaluări
- Ecte323 1-2020Document62 paginiEcte323 1-2020FUCKYOUÎncă nu există evaluări
- Power Electronics 5 - 2017Document22 paginiPower Electronics 5 - 2017FUCKYOUÎncă nu există evaluări
- ELARA Wiring DiagramDocument6 paginiELARA Wiring DiagramSuubi brianÎncă nu există evaluări
- Electrical Workshop - ExperimentsDocument7 paginiElectrical Workshop - ExperimentsMirza Bilal100% (1)
- ITELEC3207 - Module1 - Virtual ArduinoDocument8 paginiITELEC3207 - Module1 - Virtual ArduinoPatricia AnnÎncă nu există evaluări
- En Acs880 PCP Esp CTRL PRG FW B A5Document494 paginiEn Acs880 PCP Esp CTRL PRG FW B A5Jezer LugoÎncă nu există evaluări
- Internet of Medical Things IoMT - Aranca Special ReportDocument20 paginiInternet of Medical Things IoMT - Aranca Special ReportMengot Ashu RoseÎncă nu există evaluări
- DC Choppers PDFDocument17 paginiDC Choppers PDFDeus KatureebeÎncă nu există evaluări
- Two eFlexPWM Module SynchronizationDocument10 paginiTwo eFlexPWM Module SynchronizationDinesh Dhiman100% (1)
- Digital CommunicationDocument88 paginiDigital CommunicationMrs. Sahana K AdyanthayaÎncă nu există evaluări
- Electrochemical Noise Analysis of LiiionDocument9 paginiElectrochemical Noise Analysis of LiiionShubham RaizadaÎncă nu există evaluări
- AM Modulation and AnalysisDocument2 paginiAM Modulation and AnalysisSanjaikumar KÎncă nu există evaluări
- Representation of Power System ComponentsDocument14 paginiRepresentation of Power System ComponentsRume EmujekarohwoÎncă nu există evaluări
- Equivalencias SMDDocument21 paginiEquivalencias SMDRoberto LimaÎncă nu există evaluări
- Bergquist - Brochure-Thermal-Management-MaterialsDocument16 paginiBergquist - Brochure-Thermal-Management-MaterialsMaike SongÎncă nu există evaluări
- Assignment 02Document10 paginiAssignment 02Zain UL ABIDINÎncă nu există evaluări
- Electronic Terminals NewDocument622 paginiElectronic Terminals NewNguyễn PhúÎncă nu există evaluări
- Ca 3083Document4 paginiCa 3083tabassam7801Încă nu există evaluări
- Flip-Chip III-V-To-Silicon Photonics Interfaces For Optical SensorDocument7 paginiFlip-Chip III-V-To-Silicon Photonics Interfaces For Optical Sensoranushpamathi SundararajanÎncă nu există evaluări
- Intermediate Bus PWM Controller Features: ISL6744ADocument18 paginiIntermediate Bus PWM Controller Features: ISL6744AaliolleikÎncă nu există evaluări
- Baum 18 1st STN Pile Instructions tp10313Document50 paginiBaum 18 1st STN Pile Instructions tp10313cesar michell martínez QuezadaÎncă nu există evaluări
- ECN-341 - Lab-01 ReportDocument4 paginiECN-341 - Lab-01 ReportAjinkya YawalkarÎncă nu există evaluări
- Opa 445Document28 paginiOpa 445Be OshoÎncă nu există evaluări
- Manual Termostato PennDocument4 paginiManual Termostato Pennraulneti1984Încă nu există evaluări
- Project ReportDocument54 paginiProject Report138 GowriÎncă nu există evaluări
- cp1h P080-E1 11 1 csm1004100 PDFDocument34 paginicp1h P080-E1 11 1 csm1004100 PDFAbir AutomationÎncă nu există evaluări
- Repower Mm82 (50 Hz/2050 KW) : Product DescriptionDocument28 paginiRepower Mm82 (50 Hz/2050 KW) : Product DescriptionHarold CarrascoÎncă nu există evaluări
- Lec01 Verilog Combinational Circuits Design 2022 SpringDocument64 paginiLec01 Verilog Combinational Circuits Design 2022 Springyanjia8161100Încă nu există evaluări
- General Electrical SystemDocument1 paginăGeneral Electrical SystemUrsae IngenieriaÎncă nu există evaluări
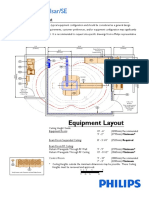
- Achieva 1.5T Pulsar SEDocument3 paginiAchieva 1.5T Pulsar SEISRAEL MATEOS GARCIA-SALAMANCAÎncă nu există evaluări
- TDA7294 400W Dual Bridge Stereo Amplifier Technical MrigankaDocument2 paginiTDA7294 400W Dual Bridge Stereo Amplifier Technical MrigankaNelsonÎncă nu există evaluări
- MFL69309711 02 PDFDocument304 paginiMFL69309711 02 PDFIVE 89Încă nu există evaluări