S-ar putea să vă placă și
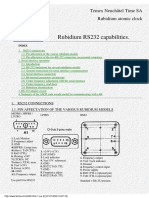
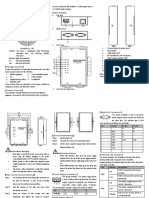
- Rubidium RS232 Capabilities.: Temex Neuchâtel Time SA Rubidium Atomic ClockDocument6 paginiRubidium RS232 Capabilities.: Temex Neuchâtel Time SA Rubidium Atomic ClockpdamocÎncă nu există evaluări
- NAN-29 NRF51 Development With GCC and Eclipse Application Note v1.1Document11 paginiNAN-29 NRF51 Development With GCC and Eclipse Application Note v1.1rasyoung5302Încă nu există evaluări
- An Introduction To Digital ForensicsDocument11 paginiAn Introduction To Digital ForensicsSeanÎncă nu există evaluări
- LS - XBM - XBC - Cnet (Koneksi PLC LS-LAYAR)Document6 paginiLS - XBM - XBC - Cnet (Koneksi PLC LS-LAYAR)prihartini nurmacrifahÎncă nu există evaluări
- Siemens S7 300Document8 paginiSiemens S7 300mastorres87Încă nu există evaluări
- Pinagem PCI ExpressDocument11 paginiPinagem PCI ExpressDirson Volmir WilligÎncă nu există evaluări
- EGP2-X401 DatasheetDocument1 paginăEGP2-X401 DatasheettakjeÎncă nu există evaluări
- Omron CJ CS CPDocument4 paginiOmron CJ CS CPVu MinhÎncă nu există evaluări
- Installation Manual - RS232-485-OPTO-A ConverterDocument4 paginiInstallation Manual - RS232-485-OPTO-A ConverterrobertmithieryÎncă nu există evaluări
- Description Features: LTC485 Low Power RS485 Interface TransceiverDocument14 paginiDescription Features: LTC485 Low Power RS485 Interface Transceivergreemax100% (1)
- Toshiba T SeriesDocument4 paginiToshiba T Seriesthomi dhiaÎncă nu există evaluări
- Mitsubishi FX5U: HMI SettingDocument5 paginiMitsubishi FX5U: HMI SettingmbgprsmsÎncă nu există evaluări
- GFK0682EDocument2 paginiGFK0682EsabasthianÎncă nu există evaluări
- IC200ACC415 DS RS232 RS485 Interface Adapter VersaMaxMicroNano GFK1834 2002Document1 paginăIC200ACC415 DS RS232 RS485 Interface Adapter VersaMaxMicroNano GFK1834 2002jav_08Încă nu există evaluări
- Delta DVPDocument2 paginiDelta DVPyahia abdelliÎncă nu există evaluări
- EdgeBox-RPI UM (Draft)Document17 paginiEdgeBox-RPI UM (Draft)Yuhua LiÎncă nu există evaluări
- Mitsubishi FX5UDocument5 paginiMitsubishi FX5UmarioÎncă nu există evaluări
- Data Type ID Troublshooting V4Document15 paginiData Type ID Troublshooting V4David J. MoranÎncă nu există evaluări
- Kuman 3.5 Inch Touch Screen DatasheetDocument15 paginiKuman 3.5 Inch Touch Screen DatasheetMarcGarciaÎncă nu există evaluări
- Versamax Cable ConfigDocument2 paginiVersamax Cable ConfigIrfan KhanÎncă nu există evaluări
- Ge SNP XDocument3 paginiGe SNP XIgor SuraevÎncă nu există evaluări
- Port Pin Outs: Pin # Function I/ODocument6 paginiPort Pin Outs: Pin # Function I/OHector VillarrealÎncă nu există evaluări
- E101rgd1280lbam350 CDocument18 paginiE101rgd1280lbam350 CKeys SyekÎncă nu există evaluări
- KOYO Wintek MT500 SeriesDocument4 paginiKOYO Wintek MT500 SeriesRicardoRuiz4Încă nu există evaluări
- Sony 9 Pin Protocol Wiring DiagramsDocument5 paginiSony 9 Pin Protocol Wiring DiagramsDavid JacquesÎncă nu există evaluări
- AB DH485: HMI SettingDocument2 paginiAB DH485: HMI SettingCarlos Enrique Pacheco HerreraÎncă nu există evaluări
- MAX1232 Microprocessor Monitor: General Description FeaturesDocument8 paginiMAX1232 Microprocessor Monitor: General Description FeaturesFatih YILDIRIMÎncă nu există evaluări
- Fatek Fb/Fbs/B1/B1Z Series: Hmi SettingDocument5 paginiFatek Fb/Fbs/B1/B1Z Series: Hmi SettingMohtashim KazmiÎncă nu există evaluări
- Cable Pinouts: SRP I/O ModuleDocument8 paginiCable Pinouts: SRP I/O Moduledenilson.rodr1357Încă nu există evaluări
- I O PinoutDocument5 paginiI O PinoutDanang KartikaÎncă nu există evaluări
- KoyoDocument4 paginiKoyovichitÎncă nu există evaluări
- MITSUBISHI QJ71 Driver For Q00/Q01 CPU Port: HMI SettingDocument3 paginiMITSUBISHI QJ71 Driver For Q00/Q01 CPU Port: HMI SettingHamid KharazmiÎncă nu există evaluări
- LCM2004A: Data Bus LineDocument1 paginăLCM2004A: Data Bus LineAndres TorresÎncă nu există evaluări
- Manual Programacao Argox As 8000Document34 paginiManual Programacao Argox As 8000satishÎncă nu există evaluări
- Rdc232hub ds12Document1 paginăRdc232hub ds12hennrynsÎncă nu există evaluări
- Installation HardwareDocument15 paginiInstallation HardwarekalkumarmÎncă nu există evaluări
- Mgate Mb3170/Mb3270 Quick Installation Guide: Edition 7.1, February 2016Document6 paginiMgate Mb3170/Mb3270 Quick Installation Guide: Edition 7.1, February 2016heikelÎncă nu există evaluări
- Digitech RP-1 Service ManualDocument19 paginiDigitech RP-1 Service ManualTama SatriaÎncă nu există evaluări
- ch340g Part 3Document3 paginich340g Part 3David MoodyÎncă nu există evaluări
- WuT - e 86000 WW Prus 000Document3 paginiWuT - e 86000 WW Prus 000Daj NemojÎncă nu există evaluări
- Rdc232hub Um11Document2 paginiRdc232hub Um11hennrynsÎncă nu există evaluări
- Real Rs232 For Laptop PCS: Small CircuitscollectionDocument1 paginăReal Rs232 For Laptop PCS: Small CircuitscollectionTariq ZuhlufÎncă nu există evaluări
- Serial Programming/MAX232 Driver Receiver: ApplicabilityDocument7 paginiSerial Programming/MAX232 Driver Receiver: Applicabilityarchanasingh88Încă nu există evaluări
- Interfaces: - High Data Rate, But ExpensiveDocument16 paginiInterfaces: - High Data Rate, But ExpensiveHARITHA JÎncă nu există evaluări
- Using DE0-Nano ADC-1Document17 paginiUsing DE0-Nano ADC-1Sylwester MÎncă nu există evaluări
- AB DH485: HMI SettingDocument2 paginiAB DH485: HMI SettingStanleyÎncă nu există evaluări
- EX9520ARAR Quick ManualDocument4 paginiEX9520ARAR Quick ManualSi ClaÎncă nu există evaluări
- Cables Cisco PinoutDocument34 paginiCables Cisco PinoutРуслан КапетингÎncă nu există evaluări
- Rockwell DF1 (BCC) : HMI SettingDocument5 paginiRockwell DF1 (BCC) : HMI SettingDavid Andrés Zamorano CarreraÎncă nu există evaluări
- Evaluates: DS28E01/DS28CN01/DS2460 Secure Authentication Starter KitDocument15 paginiEvaluates: DS28E01/DS28CN01/DS2460 Secure Authentication Starter KitWilman LealÎncă nu există evaluări
- Gw1102-2di (3in1) QigDocument3 paginiGw1102-2di (3in1) QigTam DuongÎncă nu există evaluări
- GMKN 1022Document6 paginiGMKN 10221012268087Încă nu există evaluări
- Serial Console-Interface Connector Pin AssignmentsDocument8 paginiSerial Console-Interface Connector Pin AssignmentsSagittarius41278Încă nu există evaluări
- 06,250 (-1), 260 To 240 RS-232 Communications Wiring Diagram: TechnotesDocument1 pagină06,250 (-1), 260 To 240 RS-232 Communications Wiring Diagram: TechnoteswarwarÎncă nu există evaluări
- Infineon TLE6209R DS v03 02 enDocument30 paginiInfineon TLE6209R DS v03 02 enRoger SegoÎncă nu există evaluări
- Lab4 Using - DE - Series - ADCDocument20 paginiLab4 Using - DE - Series - ADCNguyên Trịnh Vũ Đăng0% (1)
- Con 422 Pe25Document2 paginiCon 422 Pe25yanghao1976Încă nu există evaluări
- DOP-HMI Connection en TermoDocument137 paginiDOP-HMI Connection en TermoThai TranÎncă nu există evaluări
- Using de Series ADCDocument20 paginiUsing de Series ADCAshish SharmaÎncă nu există evaluări
- Altus ALNET-I: HMI SettingDocument5 paginiAltus ALNET-I: HMI SettingalexeiruarkÎncă nu există evaluări
- Palo Alto Firewall Interview Questions and AnswersDocument13 paginiPalo Alto Firewall Interview Questions and Answerssanthosh437100% (2)
- System Copy and Migration - OptimizationDocument20 paginiSystem Copy and Migration - Optimizationpatip9Încă nu există evaluări
- Comcast Business IP Gateway User GuideDocument25 paginiComcast Business IP Gateway User GuidedeoptimaÎncă nu există evaluări
- STK SL8500 Data SheetDocument5 paginiSTK SL8500 Data SheetBillcÎncă nu există evaluări
- SRDFDocument1 paginăSRDFKumara VeeraÎncă nu există evaluări
- Remote ExploitationDocument2 paginiRemote Exploitationapi-22231386Încă nu există evaluări
- Terms of Reference Supply and Delivery of Laptops, Desktops & PeripheralsDocument14 paginiTerms of Reference Supply and Delivery of Laptops, Desktops & PeripheralsNieva Marie Candelario DumoÎncă nu există evaluări
- Deploying Oracle Database On Oracle Compute Cloud Service InstanceDocument30 paginiDeploying Oracle Database On Oracle Compute Cloud Service Instanceambipac@yahoo.comÎncă nu există evaluări
- TSC Barcode Printer P200Document2 paginiTSC Barcode Printer P200NetSystmÎncă nu există evaluări
- Consul As A Monitoring Service PresentationDocument85 paginiConsul As A Monitoring Service PresentationAnonymous ryDGv1Încă nu există evaluări
- MODCENTER Product SheetDocument1 paginăMODCENTER Product SheetArdi PratamaÎncă nu există evaluări
- Lab 1 Ip PPP Pos v3.2Document50 paginiLab 1 Ip PPP Pos v3.2Dardan BÎncă nu există evaluări
- Integrity Rx1620Document122 paginiIntegrity Rx1620Mohamed JasemÎncă nu există evaluări
- Ee443 L04 McuhwDocument24 paginiEe443 L04 McuhwAyberk Furkan YağdıÎncă nu există evaluări
- Figure 3.13 Transfer of Control With Multiple InterruptsDocument10 paginiFigure 3.13 Transfer of Control With Multiple InterruptsAhmed AyazÎncă nu există evaluări
- Comtech/EFData FX Series 7.x WAN Optimization DatasheetDocument5 paginiComtech/EFData FX Series 7.x WAN Optimization DatasheetarzeszutÎncă nu există evaluări
- Paper: Converting Adabas To Ibm Db2 For Z/Os With ConsistadsDocument36 paginiPaper: Converting Adabas To Ibm Db2 For Z/Os With Consistadsgborja8881331Încă nu există evaluări
- AFDX - Real-Time EthernetDocument33 paginiAFDX - Real-Time EthernetVarun AgarwalÎncă nu există evaluări
- Mulesoft Integration Architect MockQuestions - Quizlet-IDXDocument14 paginiMulesoft Integration Architect MockQuestions - Quizlet-IDXsathish_varadharajuÎncă nu există evaluări
- FactoryTalk View Software Opens in Demo ModeDocument6 paginiFactoryTalk View Software Opens in Demo ModeJose SierraÎncă nu există evaluări
- Industrial TrainingDocument14 paginiIndustrial TrainingAbhay SharmaÎncă nu există evaluări
- MT 5656Document2 paginiMT 5656Samuel LekhbakÎncă nu există evaluări
- Application Manual RV-3028-C7: Extreme Low Power Real-Time Clock Module With I C-Bus InterfaceDocument116 paginiApplication Manual RV-3028-C7: Extreme Low Power Real-Time Clock Module With I C-Bus InterfaceNelson Pimiento SerranoÎncă nu există evaluări
- 8051 VariantsDocument10 pagini8051 VariantsRomeu Corradi JúniorÎncă nu există evaluări
- M 1423 PDFDocument1.032 paginiM 1423 PDFmacroendrixÎncă nu există evaluări
- UNIX PermissionsDocument4 paginiUNIX PermissionsIngiaÎncă nu există evaluări
- ICND120SG Vol1Document372 paginiICND120SG Vol1Phuoc Trinh100% (2)
- CX3G FX3GC PLC Programming Manual - V21.81Document83 paginiCX3G FX3GC PLC Programming Manual - V21.81Lalo MendezÎncă nu există evaluări