S-ar putea să vă placă și
- L Stability of Large Scale SystemsDocument4 paginiL Stability of Large Scale SystemsBinhMinh NguyenÎncă nu există evaluări
- A Dictionary of Basic Japanese GrammarDocument644 paginiA Dictionary of Basic Japanese GrammarBinhMinh Nguyen100% (2)
- Gia o Trinh May DienDocument306 paginiGia o Trinh May DienNguyễn Đăng ĐứcÎncă nu există evaluări
- Decentralized Design of Feedback Control of Large Scale SystemDocument95 paginiDecentralized Design of Feedback Control of Large Scale SystemBinhMinh NguyenÎncă nu există evaluări
- Distributed Kalman Filter For Large Scale SystemDocument17 paginiDistributed Kalman Filter For Large Scale SystemBinhMinh NguyenÎncă nu există evaluări
- Survey of Decentralized Control Methods For Large Scale SystemsDocument21 paginiSurvey of Decentralized Control Methods For Large Scale SystemsBinhMinh NguyenÎncă nu există evaluări
- Stability Analysis of Systems With Generalized Frequency VariablesDocument14 paginiStability Analysis of Systems With Generalized Frequency VariablesBinhMinh NguyenÎncă nu există evaluări
- Prehistoric Pottery in Vietnam and its Relationships with Southeast AsiaDocument12 paginiPrehistoric Pottery in Vietnam and its Relationships with Southeast AsiaBinhMinh NguyenÎncă nu există evaluări
- Multi-Rate Path Following ControlDocument6 paginiMulti-Rate Path Following ControlBinhMinh NguyenÎncă nu există evaluări
- Bayesian Analysis For Political ResearchDocument23 paginiBayesian Analysis For Political ResearchBinhMinh NguyenÎncă nu există evaluări
- Advance HDL Design Training On Xilinx FPGADocument333 paginiAdvance HDL Design Training On Xilinx FPGAlexuancongÎncă nu există evaluări
- HSGPSDLL Library User Manual (V1.1) : Date: 11/03/2008Document9 paginiHSGPSDLL Library User Manual (V1.1) : Date: 11/03/2008danielsloczynskiÎncă nu există evaluări
- Evaluation of Observer Structures With Application To Fault DetectionDocument46 paginiEvaluation of Observer Structures With Application To Fault DetectionBinhMinh NguyenÎncă nu există evaluări
- Vehicle System Dynamics: Please Scroll Down For ArticleDocument16 paginiVehicle System Dynamics: Please Scroll Down For ArticleBinhMinh NguyenÎncă nu există evaluări
- FTPDocument16 paginiFTPBinhMinh NguyenÎncă nu există evaluări
- Steeering Angle SensorDocument2 paginiSteeering Angle SensorBinhMinh NguyenÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Pipes Open ChannelDocument20 paginiPipes Open Channelalfarero.tristangiovannÎncă nu există evaluări
- Faraday's Electeomagnetic Induction.Document5 paginiFaraday's Electeomagnetic Induction.Rajesh JagadeesanÎncă nu există evaluări
- 5-1 VibrationsDocument89 pagini5-1 VibrationsAbdulaziz MohamedÎncă nu există evaluări
- Understanding How Orifices WorkDocument27 paginiUnderstanding How Orifices WorkEmanoAce100% (1)
- Thermodynamics ReviewerDocument118 paginiThermodynamics ReviewerRenz Karl DeclaroÎncă nu există evaluări
- Answer Key: Holt PhysicsDocument8 paginiAnswer Key: Holt PhysicsMuhammadÎncă nu există evaluări
- Me 2351 Gas Dynamics and Jet PropulsionDocument2 paginiMe 2351 Gas Dynamics and Jet PropulsionMohanraj SubramaniÎncă nu există evaluări
- Chapter 2. Principles of HydrostaticsDocument5 paginiChapter 2. Principles of HydrostaticsJames Fontanilla Cudal Jr.Încă nu există evaluări
- E105: Linear Expansion ExperimentsDocument3 paginiE105: Linear Expansion ExperimentsRose Anne MalabananÎncă nu există evaluări
- Physics: Extbook For Class XLDocument193 paginiPhysics: Extbook For Class XLChaithanya Bharghava SÎncă nu există evaluări
- The Hazen Williams Formula For Use in Fire Sprinkler Systems - Canute LLP PDFDocument2 paginiThe Hazen Williams Formula For Use in Fire Sprinkler Systems - Canute LLP PDFSivapriya Samy0% (1)
- Noyan - Residual Stress - Measurement by Diffraction and InterpretationDocument286 paginiNoyan - Residual Stress - Measurement by Diffraction and InterpretationFrancesca SiracusaÎncă nu există evaluări
- Highway Engineering NOTESDocument109 paginiHighway Engineering NOTESMuomaalahÎncă nu există evaluări
- CBSE Sample Paper For Class 11 Physics (Solved) - Set A - AglaSem SchoolsDocument6 paginiCBSE Sample Paper For Class 11 Physics (Solved) - Set A - AglaSem Schoolsamitaich1991Încă nu există evaluări
- CHP 7 8 Energy Energy Transfer Potential EnergyDocument66 paginiCHP 7 8 Energy Energy Transfer Potential EnergyNur Hafizah Md DisaÎncă nu există evaluări
- 210-04 Kinetics of ParticlesDocument6 pagini210-04 Kinetics of ParticlesHendra RiswanÎncă nu există evaluări
- NR 410103 Irrigation IIDocument5 paginiNR 410103 Irrigation IISrinivasa Rao GÎncă nu există evaluări
- Table of Material Properties For Structural Steel S235, S275, S355, S420Document4 paginiTable of Material Properties For Structural Steel S235, S275, S355, S420Arjun Soman100% (1)
- Ultrasonic Testing General Basics Fundam 9-12Document4 paginiUltrasonic Testing General Basics Fundam 9-12Kevin HuangÎncă nu există evaluări
- 127-136 Krishnan PDFDocument10 pagini127-136 Krishnan PDFEl Youbi MohammedÎncă nu există evaluări
- Heat Transfer Problem Solution BSL - Heat Transfer From A Radial Circular FinDocument4 paginiHeat Transfer Problem Solution BSL - Heat Transfer From A Radial Circular FinMitesh WaghelaÎncă nu există evaluări
- Prediction of Stress Distribution in Press-Fit Process of Interference Fit With A New Theoretical ModelDocument14 paginiPrediction of Stress Distribution in Press-Fit Process of Interference Fit With A New Theoretical ModelDragon EcuÎncă nu există evaluări
- Design of Members For FlexureDocument16 paginiDesign of Members For FlexureJade CarilloÎncă nu există evaluări
- (IISc Lecture Notes Series, V. 3) M L Munjal - Noise and Vibration ControlDocument294 pagini(IISc Lecture Notes Series, V. 3) M L Munjal - Noise and Vibration ControlAvinash ReddyÎncă nu există evaluări
- Report Full Direct Shear Test Edit Repaired PDFDocument15 paginiReport Full Direct Shear Test Edit Repaired PDFarif daniel muhamaddunÎncă nu există evaluări
- M 236 ContentDocument133 paginiM 236 ContentsanjibkrjanaÎncă nu există evaluări
- Vitali Et Al 2018 - Analytical Solution For Tunnels Not Aligned TUSTDocument12 paginiVitali Et Al 2018 - Analytical Solution For Tunnels Not Aligned TUSTjuan muneraÎncă nu există evaluări
- Contact and Noncontact Forces StationDocument12 paginiContact and Noncontact Forces StationDemanda GookinÎncă nu există evaluări
- Balanced and Unbalanced ForcesDocument3 paginiBalanced and Unbalanced Forcesapi-372007393% (14)
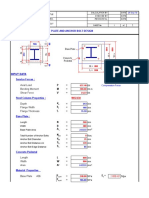
- Baseplate Design AiscDocument20 paginiBaseplate Design AiscShamim Ahsan ZuberyÎncă nu există evaluări