S-ar putea să vă placă și
- CDL Test AnswersDocument13 paginiCDL Test AnswersRichard Tod Gould100% (1)
- NADCA-Introduction To Die Casting PDFDocument116 paginiNADCA-Introduction To Die Casting PDFMichael Naím Dévora Quintanar100% (6)
- Space Gass Lecture NotesDocument15 paginiSpace Gass Lecture NotesApril Ingram33% (3)
- Mercedes Sensor CodesDocument2 paginiMercedes Sensor CodesBen SchopeeÎncă nu există evaluări
- Radio Control for Model Ships, Boats and AircraftDe la EverandRadio Control for Model Ships, Boats and AircraftEvaluare: 5 din 5 stele5/5 (1)
- 09-Vortex Lattice Methods (Software)Document51 pagini09-Vortex Lattice Methods (Software)Gonzalo Sáez100% (1)
- Frame - Portal and Gable Rigid Plane Frame AnalysisDocument6 paginiFrame - Portal and Gable Rigid Plane Frame Analysisnamasral100% (4)
- FEA Viva QuestionsDocument7 paginiFEA Viva Questionsdanialadam67% (3)
- Frame - Portal and Gable Rigid Plane Frame AnalysisDocument6 paginiFrame - Portal and Gable Rigid Plane Frame AnalysisCarlos Valverde PortillaÎncă nu există evaluări
- Of Steel: Design Latticed StructuresDocument13 paginiOf Steel: Design Latticed StructuresCTBÎncă nu există evaluări
- SM - 3 TransmissionDocument397 paginiSM - 3 TransmissionJanÎncă nu există evaluări
- CNC Wiring DiagramDocument1 paginăCNC Wiring Diagramsebastian100% (2)
- Equations of State For The Calculation of Fluid-Phase Equilibria, 2000 PDFDocument28 paginiEquations of State For The Calculation of Fluid-Phase Equilibria, 2000 PDFjoreliÎncă nu există evaluări
- BeamanalDocument7 paginiBeamanalAiman Amir100% (1)
- Experiment 5 Dipole Array BroadsideDocument10 paginiExperiment 5 Dipole Array BroadsideDr. Beulah JacksonÎncă nu există evaluări
- 2.CH890.02 - IMA - S 223.1422-02.enDocument63 pagini2.CH890.02 - IMA - S 223.1422-02.enJoe Vargas JulcaÎncă nu există evaluări
- FMR BTS Power ConsumptionDocument3 paginiFMR BTS Power ConsumptionDeden SuredenÎncă nu există evaluări
- ASIC Layout - 2 Digital Innovus PDFDocument45 paginiASIC Layout - 2 Digital Innovus PDFarunpandiyanÎncă nu există evaluări
- Standard Purlins Manual PDFDocument76 paginiStandard Purlins Manual PDFamazonÎncă nu există evaluări
- Pump Sizing CalculationDocument12 paginiPump Sizing Calculationionutlaur86Încă nu există evaluări
- Instructions For Running PrepVLF and Inv2DVLF 2 DDocument12 paginiInstructions For Running PrepVLF and Inv2DVLF 2 Dpro100% (2)
- Matecconf Easn2019 02018Document8 paginiMatecconf Easn2019 02018Bayu Wiyarta YasinÎncă nu există evaluări
- RawdogmanualDocument15 paginiRawdogmanualapi-247110210Încă nu există evaluări
- "Frame" - Portal and Gable Rigid Plane Frame Analysis: Program DescriptionDocument12 pagini"Frame" - Portal and Gable Rigid Plane Frame Analysis: Program DescriptionCharles Rodríguez SalinasÎncă nu există evaluări
- CFS10 Calculation Module: RSG Software, IncDocument11 paginiCFS10 Calculation Module: RSG Software, IncTito MuñozÎncă nu există evaluări
- FREDSpecsDocument10 paginiFREDSpecsManikandanÎncă nu există evaluări
- Guida A Xfoil (Guide To Xfoil)Document28 paginiGuida A Xfoil (Guide To Xfoil)Giovanni ViciconteÎncă nu există evaluări
- Ws Appendix DynaDocument60 paginiWs Appendix DynaSerkan AltıntaşÎncă nu există evaluări
- XFOIL 6 Guia de UsuarioDocument34 paginiXFOIL 6 Guia de Usuariotorups99Încă nu există evaluări
- Membrane and cable systems introductionDocument15 paginiMembrane and cable systems introductionHousam ShawiÎncă nu există evaluări
- Chapter II Half Wavelength Patch AntennaDocument47 paginiChapter II Half Wavelength Patch AntennaNeeraj RaoÎncă nu există evaluări
- Control Engineering Practice: Majid Zamani, Masoud Karimi-Ghartemani, Nasser Sadati, Mostafa ParnianiDocument8 paginiControl Engineering Practice: Majid Zamani, Masoud Karimi-Ghartemani, Nasser Sadati, Mostafa ParnianiMohit JainÎncă nu există evaluări
- Me 8711 Lab Manual LmcetDocument64 paginiMe 8711 Lab Manual LmcetGODWIN GÎncă nu există evaluări
- VaspKit User's GuideDocument4 paginiVaspKit User's GuideThi HoÎncă nu există evaluări
- Department of Mechanical Engineering: Laboratory ManualDocument52 paginiDepartment of Mechanical Engineering: Laboratory ManualMECHANICAL SMCETÎncă nu există evaluări
- Department of Mechanical Engineering: Laboratory ManualDocument52 paginiDepartment of Mechanical Engineering: Laboratory ManualMECHANICAL SMCETÎncă nu există evaluări
- Department of Mechanical Engineering: Laboratory ManualDocument52 paginiDepartment of Mechanical Engineering: Laboratory ManualMECHANICAL SMCETÎncă nu există evaluări
- 19 7960 07 NotesDocument17 pagini19 7960 07 NotesMuhammad Fahmi PamungkasÎncă nu există evaluări
- STAAD Steel Table SpecificationDocument7 paginiSTAAD Steel Table SpecificationiksanÎncă nu există evaluări
- Extract Layout and Generate SPICE NetlistDocument59 paginiExtract Layout and Generate SPICE NetlistEliasA.TiongkiaoÎncă nu există evaluări
- ToInvestigateDocument8 paginiToInvestigateEsmaeel Jafargholi RangrazÎncă nu există evaluări
- Finite Element Analysis QuestionsDocument6 paginiFinite Element Analysis QuestionssathishneÎncă nu există evaluări
- Ellore 632 509 Department of MechanicalDocument6 paginiEllore 632 509 Department of MechanicalBALAKRISHNANÎncă nu există evaluări
- Table of Contents and Command ReferenceDocument49 paginiTable of Contents and Command ReferenceAmine BouÎncă nu există evaluări
- Floor Planning - A NoteDocument4 paginiFloor Planning - A NotePrabhavathi ParameshwarappaÎncă nu există evaluări
- Method of Analysis:: 1-Geometry DescriptionDocument3 paginiMethod of Analysis:: 1-Geometry Descriptionbadr amÎncă nu există evaluări
- Stepped BarDocument5 paginiStepped BarKalisetti AnilÎncă nu există evaluări
- Fast 2D Separable Symmetric/Anti-Symmmetric ConvolutionDocument7 paginiFast 2D Separable Symmetric/Anti-Symmmetric Convolutionpi194043Încă nu există evaluări
- Design of Vertical Take Off and Landing Vtol Aircraft SystemDocument5 paginiDesign of Vertical Take Off and Landing Vtol Aircraft SystemDivy AgarwalÎncă nu există evaluări
- EA467 Antenna Design Using EZNECDocument6 paginiEA467 Antenna Design Using EZNECDalyskÎncă nu există evaluări
- 3D-BASIS-ME-MB: Computer Program For Nonlinear Dynamic Analysis of Seismically Isolated StructuresDocument125 pagini3D-BASIS-ME-MB: Computer Program For Nonlinear Dynamic Analysis of Seismically Isolated StructuresDon Ing Marcos LeónÎncă nu există evaluări
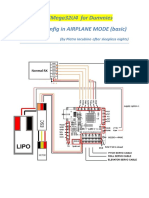
- Configure Nanowii ATMega32U4 for Airplane ModeDocument6 paginiConfigure Nanowii ATMega32U4 for Airplane ModezileÎncă nu există evaluări
- Stressing A Plate With A Circular or Elliptical HoleDocument4 paginiStressing A Plate With A Circular or Elliptical HoleAlex da SilvaÎncă nu există evaluări
- Holistic Exam2005-1 PDFDocument6 paginiHolistic Exam2005-1 PDFEnyew100% (1)
- 3D Transonic Flow Over A WingDocument82 pagini3D Transonic Flow Over A Wingcarlos cotaÎncă nu există evaluări
- Beam AnalDocument7 paginiBeam Analgercho23Încă nu există evaluări
- Users GuideDocument34 paginiUsers GuideZaratustra NietzcheÎncă nu există evaluări
- PlateShellElemDocument11 paginiPlateShellElemAnonymous YDwBCtsÎncă nu există evaluări
- Java FoilDocument27 paginiJava FoilJúlio Cesar RodriguesÎncă nu există evaluări
- LABFILDocument6 paginiLABFILRam CharanÎncă nu există evaluări
- Finite Element Analysis: Assignment TitleDocument10 paginiFinite Element Analysis: Assignment TitleAhmad AbdullahÎncă nu există evaluări
- Tbarc ProgramsDocument30 paginiTbarc ProgramslukastadeoÎncă nu există evaluări
- Analysis of Multiple Bodies (NBODY 1)Document9 paginiAnalysis of Multiple Bodies (NBODY 1)Mihai GataÎncă nu există evaluări
- A Brief Guide to Setting Up FLOW-3D SimulationsDocument7 paginiA Brief Guide to Setting Up FLOW-3D Simulationsdeadlyman8372Încă nu există evaluări
- Table of ContentsDocument34 paginiTable of ContentsSampath KumarÎncă nu există evaluări
- NACA 23012 Airfoil Panel Method AnalysisDocument24 paginiNACA 23012 Airfoil Panel Method AnalysisHimanshu ModiÎncă nu există evaluări
- Modeling of Complex Systems: Application to Aeronautical DynamicsDe la EverandModeling of Complex Systems: Application to Aeronautical DynamicsÎncă nu există evaluări
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionDe la EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionÎncă nu există evaluări
- Convolutional Neural Networks: Fundamentals and Applications for Analyzing Visual ImageryDe la EverandConvolutional Neural Networks: Fundamentals and Applications for Analyzing Visual ImageryÎncă nu există evaluări
- Raspberry Pi Wireless AdapterDocument3 paginiRaspberry Pi Wireless AdapternikwplayÎncă nu există evaluări
- 3D Printer Manual for Duplicator I3 MiniDocument38 pagini3D Printer Manual for Duplicator I3 MiniRichard MillerÎncă nu există evaluări
- Design For A Cold-Formed Steel Framed Manufactured HomeDocument36 paginiDesign For A Cold-Formed Steel Framed Manufactured HomeJohn Paulsy100% (1)
- Lafcadio Hearn's Appreciation of HaikuDocument7 paginiLafcadio Hearn's Appreciation of HaikuAnonymous mE6MEje0Încă nu există evaluări
- TB 1009Document7 paginiTB 1009Anonymous mE6MEje0Încă nu există evaluări
- ABS Data Sheet PDFDocument2 paginiABS Data Sheet PDFAnonymous mE6MEje0Încă nu există evaluări
- Epson Android Kitkat Native Printing For Easy Mobile Printing Anywhere, AnytimeDocument2 paginiEpson Android Kitkat Native Printing For Easy Mobile Printing Anywhere, AnytimeAnonymous mE6MEje0Încă nu există evaluări
- Bcn3d Moveo BomDocument2 paginiBcn3d Moveo BomXDXDXDÎncă nu există evaluări
- HelpDocument1 paginăHelpAnonymous mE6MEje0Încă nu există evaluări
- Lesvos 3W Map NGOs and Services 11.07.18Document1 paginăLesvos 3W Map NGOs and Services 11.07.18Anonymous mE6MEje0Încă nu există evaluări
- Logical Fallacies ExplainedDocument9 paginiLogical Fallacies Explainedmirradewi100% (1)
- Strike15 PDFDocument1 paginăStrike15 PDFAnonymous mE6MEje0Încă nu există evaluări
- Airbus Aircraft 2015 Average List Prices (Mio Usd)Document1 paginăAirbus Aircraft 2015 Average List Prices (Mio Usd)Anonymous mE6MEje0Încă nu există evaluări
- Printable I3 Style Mini 3D Printer by 3dtjeDocument23 paginiPrintable I3 Style Mini 3D Printer by 3dtjeAnonymous mE6MEje0Încă nu există evaluări
- HashDocument1 paginăHashAnonymous mE6MEje0Încă nu există evaluări
- Glass Recycling Into Tiles FinalDocument2 paginiGlass Recycling Into Tiles FinalAnonymous mE6MEje0Încă nu există evaluări
- Strike15 PDFDocument1 paginăStrike15 PDFAnonymous mE6MEje0Încă nu există evaluări
- EC6 2 ReleaseNotes P638 24Document3 paginiEC6 2 ReleaseNotes P638 24Anonymous mE6MEje0Încă nu există evaluări
- Salas-Zarate 13189 PDFDocument14 paginiSalas-Zarate 13189 PDFAnonymous mE6MEje0Încă nu există evaluări
- Magnetic Bearing 3D Metal Printer Bill of MaterialsDocument5 paginiMagnetic Bearing 3D Metal Printer Bill of MaterialsAnonymous mE6MEje0Încă nu există evaluări
- D5F F2Document11 paginiD5F F2vineet_bhatia_iafÎncă nu există evaluări
- HashDocument1 paginăHashAnonymous mE6MEje0Încă nu există evaluări
- LISA PRO SpecificationDocument2 paginiLISA PRO SpecificationAnonymous mE6MEje0Încă nu există evaluări
- SumatraPDF SettingsDocument2 paginiSumatraPDF Settingskane3000Încă nu există evaluări
- Commercial Audit Checklist ToolDocument27 paginiCommercial Audit Checklist ToolSouvik Ganguly0% (1)
- Melt Polycondensation of Lactic AcidDocument2 paginiMelt Polycondensation of Lactic AcidHuy HeinekenÎncă nu există evaluări
- D5F F2Document11 paginiD5F F2vineet_bhatia_iafÎncă nu există evaluări
- Ground SpeedDocument1 paginăGround SpeedAnonymous mE6MEje0Încă nu există evaluări
- DY-560-760G ManualDocument66 paginiDY-560-760G ManualJose SoMarÎncă nu există evaluări
- Wetted Wall Column Experiment and Set UPDocument4 paginiWetted Wall Column Experiment and Set UPvarun kumarÎncă nu există evaluări
- DocxDocument9 paginiDocxjamsheed sajidÎncă nu există evaluări
- 9ni 4coDocument102 pagini9ni 4cosunsirÎncă nu există evaluări
- Assignment 5: Engineering Utilities IiDocument4 paginiAssignment 5: Engineering Utilities IiRex SabersonÎncă nu există evaluări
- Advanced Numerical Methods for Process Safety AssessmentsDocument13 paginiAdvanced Numerical Methods for Process Safety Assessmentsandi suntoroÎncă nu există evaluări
- (MINI) Manual de Despiece Mini InglesDocument247 pagini(MINI) Manual de Despiece Mini InglesNahir ProtasioÎncă nu există evaluări
- Non Circular Pipe FrictionDocument3 paginiNon Circular Pipe Frictionravi_radanÎncă nu există evaluări
- Soldier Pile and Lagging Caltan 1990 Tedds CalcDocument2 paginiSoldier Pile and Lagging Caltan 1990 Tedds CalcRJSQÎncă nu există evaluări
- Caddy Rod LockDocument16 paginiCaddy Rod LockcrisalevÎncă nu există evaluări
- Multicore Cable Schedule 21-12-01Document14 paginiMulticore Cable Schedule 21-12-01Archiford NdhlovuÎncă nu există evaluări
- Cypecad Vs Etabs - En1Document37 paginiCypecad Vs Etabs - En1dskumar49Încă nu există evaluări
- Q4 Science 9 Week 1 8 PDFDocument33 paginiQ4 Science 9 Week 1 8 PDFJesiel MabagaÎncă nu există evaluări
- D7H Electrico PDFDocument2 paginiD7H Electrico PDFAnonymous KOtSfT6qÎncă nu există evaluări
- A Review On Effect of Preheating and orDocument3 paginiA Review On Effect of Preheating and orKing SabiÎncă nu există evaluări
- PCT - TY 1st PDFDocument3 paginiPCT - TY 1st PDFMayur CharanÎncă nu există evaluări
- Ball Mill For Cement GrindingDocument5 paginiBall Mill For Cement GrindingNkosilozwelo Sibanda100% (1)
- Inst Headers Install TitianDocument3 paginiInst Headers Install TitianhuntersgreenÎncă nu există evaluări
- Entropy Problems AnswersDocument6 paginiEntropy Problems AnswersTots HolaresÎncă nu există evaluări
- Oblique Shock Waves ExplainedDocument19 paginiOblique Shock Waves Explainedsksabina0% (1)