S-ar putea să vă placă și
- What A Software Architect Needs To Know When Using AF PDFDocument61 paginiWhat A Software Architect Needs To Know When Using AF PDFBalázs Nagy100% (1)
- Lesson 4 Labview RT: Chad Evans Applications EngineerDocument10 paginiLesson 4 Labview RT: Chad Evans Applications Engineers_subbulakshmiÎncă nu există evaluări
- LV FPGA Control Sample Project Detailed DocumentationDocument45 paginiLV FPGA Control Sample Project Detailed DocumentationHouessou Houeto HervéÎncă nu există evaluări
- LabVIEW Machine Vision Online - Self-Study Guide PDFDocument68 paginiLabVIEW Machine Vision Online - Self-Study Guide PDFjulÎncă nu există evaluări
- Arinc 429Document34 paginiArinc 429andre100% (1)
- 2 Labview Fpga Basics PDFDocument46 pagini2 Labview Fpga Basics PDFdimen100Încă nu există evaluări
- Kalman Filter FPGADocument100 paginiKalman Filter FPGAlizhi0007Încă nu există evaluări
- Labview Electronics Experiment DAQDocument44 paginiLabview Electronics Experiment DAQChip Huynh100% (1)
- Zynq7000 Embedded Design TutorialDocument126 paginiZynq7000 Embedded Design TutorialRohini SeetharamÎncă nu există evaluări
- EES05 - MSP430 MicrocontrollerDocument128 paginiEES05 - MSP430 MicrocontrollerasdsdÎncă nu există evaluări
- PCI6154 Data BookDocument109 paginiPCI6154 Data BookSteven YangÎncă nu există evaluări
- ARM ArchitectureDocument547 paginiARM ArchitectureAmrita BhattÎncă nu există evaluări
- RTOSDocument49 paginiRTOSAthul PkÎncă nu există evaluări
- Exam Questions 2018Document3 paginiExam Questions 2018naveen g cÎncă nu există evaluări
- 00 ReusableFirmwareIndexDocument6 pagini00 ReusableFirmwareIndexQuoc AnhÎncă nu există evaluări
- RtosDocument78 paginiRtossekinÎncă nu există evaluări
- Fundamentals of MCUs Session 1Document31 paginiFundamentals of MCUs Session 1VIJAYPUTRAÎncă nu există evaluări
- Introduction To Vision Systems in LabviewDocument27 paginiIntroduction To Vision Systems in Labviewjul100% (1)
- Labview Core 2 SummaryDocument26 paginiLabview Core 2 SummaryDanny Vu100% (1)
- IMSL C Numerical Library PDFDocument59 paginiIMSL C Numerical Library PDFAshoka VanjareÎncă nu există evaluări
- TortoiseSVN Subversion Cookbook OracleDocument122 paginiTortoiseSVN Subversion Cookbook Oraclebhanurekhap100% (1)
- Olimexino STM32Document19 paginiOlimexino STM32numero909Încă nu există evaluări
- Real Time Operating SystemsDocument44 paginiReal Time Operating SystemsAnand PatraÎncă nu există evaluări
- Xilinx Training CoursesDocument16 paginiXilinx Training Coursesnocaries9300Încă nu există evaluări
- 3.intertask Communication - Embedded OS PDFDocument8 pagini3.intertask Communication - Embedded OS PDFPushpa Latha100% (1)
- Autosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonDocument55 paginiAutosar Communication Stack Implementation With Flexray: Johan Elgered Jesper JanssonXuân ToànÎncă nu există evaluări
- RTOSDocument1 paginăRTOSvpsompur0% (1)
- Advanced Debugging of STM32-Based DevicesDocument10 paginiAdvanced Debugging of STM32-Based DevicesSandoval DanielÎncă nu există evaluări
- Um1713 User Manual: Developing Applications On Stm32Cube With Lwip Tcp/Ip StackDocument41 paginiUm1713 User Manual: Developing Applications On Stm32Cube With Lwip Tcp/Ip Stackc.cesco8703Încă nu există evaluări
- Ternary Chalcopyrite Semiconductors: Growth, Electronic Properties, and Applications: International Series of Monographs in The Science of The Solid StateDe la EverandTernary Chalcopyrite Semiconductors: Growth, Electronic Properties, and Applications: International Series of Monographs in The Science of The Solid StateEvaluare: 3 din 5 stele3/5 (1)
- Modern CmakeDocument73 paginiModern CmakeSabapathy KannappanÎncă nu există evaluări
- Cvi Basics I CourseDocument350 paginiCvi Basics I CourseAlexandra StoicaÎncă nu există evaluări
- Talk 8 AndroidArc - Binder PDFDocument29 paginiTalk 8 AndroidArc - Binder PDFDaniel Sánchez De MarcosÎncă nu există evaluări
- Performance Evaluation of Real-Time Operating Systems: Rtems, Rtlinux, EcosDocument31 paginiPerformance Evaluation of Real-Time Operating Systems: Rtems, Rtlinux, EcosAnand PatraÎncă nu există evaluări
- Mbed IntroductionDocument6 paginiMbed IntroductionNaveed Anwar BhattiÎncă nu există evaluări
- TesisDocument84 paginiTesisPablo PérezÎncă nu există evaluări
- Embedded SW Development With ECosDocument35 paginiEmbedded SW Development With ECosRakesh MenonÎncă nu există evaluări
- Ros CheatsheetDocument3 paginiRos CheatsheetROchaf NouWiÎncă nu există evaluări
- BitBake User ManualDocument68 paginiBitBake User ManualSajjad AhmedÎncă nu există evaluări
- Simply Programming C# and Visual Basic …: C# and Visual BasicDe la EverandSimply Programming C# and Visual Basic …: C# and Visual BasicÎncă nu există evaluări
- Introduction To 8085 MicroprocessorDocument35 paginiIntroduction To 8085 MicroprocessorCave BosÎncă nu există evaluări
- Tutorial5 SimulationX Kehrer PDFDocument42 paginiTutorial5 SimulationX Kehrer PDFMuamera HodzicÎncă nu există evaluări
- Hands-on TinyML: Harness the power of Machine Learning on the edge devices (English Edition)De la EverandHands-on TinyML: Harness the power of Machine Learning on the edge devices (English Edition)Evaluare: 5 din 5 stele5/5 (1)
- YAPP Router SpecificationDocument2 paginiYAPP Router SpecificationHeetashi Arora100% (1)
- Xilinx Edge Processors: Aie Engineering Team Hotchips-33 Conference, August 2021Document21 paginiXilinx Edge Processors: Aie Engineering Team Hotchips-33 Conference, August 2021ddscribeÎncă nu există evaluări
- Linux Driver Development For Embedded Processors: ST STM32MP1 Practical Labs SetupDocument22 paginiLinux Driver Development For Embedded Processors: ST STM32MP1 Practical Labs SetupRonaldMartinezÎncă nu există evaluări
- Dokumen - Pub Embedded Realtime Systems Programming 9780070482845 0070482845Document320 paginiDokumen - Pub Embedded Realtime Systems Programming 9780070482845 0070482845Murat Yasar ERTASÎncă nu există evaluări
- Labview Exercises 2Document6 paginiLabview Exercises 2salinero2488100% (1)
- Interbus Practical GuideDocument347 paginiInterbus Practical GuidepableronchoÎncă nu există evaluări
- Ansi - Scte 104 2004Document137 paginiAnsi - Scte 104 2004Vojislav RadosavljevicÎncă nu există evaluări
- Sigrok - Using Logic To Debug LogicDocument34 paginiSigrok - Using Logic To Debug Logicebbys89Încă nu există evaluări
- Quectel Umts&Lte Evb User Guide v2.1Document45 paginiQuectel Umts&Lte Evb User Guide v2.1krishnakumar GÎncă nu există evaluări
- VISA LabviewDocument22 paginiVISA LabviewVinitaVartakÎncă nu există evaluări
- Data Mapping Between Tables in ERDDocument4 paginiData Mapping Between Tables in ERDThan Lwin AungÎncă nu există evaluări
- Final Project Report - Client Server Application With VB - Net and SQL ServerDocument33 paginiFinal Project Report - Client Server Application With VB - Net and SQL ServerThan Lwin Aung0% (1)
- PLSimsDocument26 paginiPLSimsThan Lwin AungÎncă nu există evaluări
- Introduction To 3D GraphicDocument6 paginiIntroduction To 3D GraphicThan Lwin AungÎncă nu există evaluări
- Graphics Processing UnitDocument4 paginiGraphics Processing UnitThan Lwin AungÎncă nu există evaluări
- Physics of MindDocument33 paginiPhysics of MindThan Lwin AungÎncă nu există evaluări
- Digital Filters (FIR and IIR)Document7 paginiDigital Filters (FIR and IIR)Than Lwin Aung100% (1)
- Eletronics Lab Report - Current MirrorDocument3 paginiEletronics Lab Report - Current MirrorThan Lwin AungÎncă nu există evaluări
- Eletronics Lab Report - BJT AmplifierDocument3 paginiEletronics Lab Report - BJT AmplifierThan Lwin Aung50% (12)
- Eletronics Lab Report - MOSFETDocument4 paginiEletronics Lab Report - MOSFETThan Lwin Aung100% (1)
- Eletronics Lab Report - TTLDocument2 paginiEletronics Lab Report - TTLThan Lwin AungÎncă nu există evaluări
- Eletronics Lab Report - BJTDocument2 paginiEletronics Lab Report - BJTThan Lwin Aung100% (1)
- Eletronics Lab Report - Super Diodes (Implementation With Op-Amp)Document4 paginiEletronics Lab Report - Super Diodes (Implementation With Op-Amp)Than Lwin AungÎncă nu există evaluări
- Eletronics Lab Report - Zener DiodesDocument3 paginiEletronics Lab Report - Zener DiodesThan Lwin Aung71% (7)
- Eletronics Lab Report - Diodes - Transfer FunctionDocument3 paginiEletronics Lab Report - Diodes - Transfer FunctionThan Lwin AungÎncă nu există evaluări
- Eletronics Lab Report - DiodesDocument3 paginiEletronics Lab Report - DiodesThan Lwin Aung100% (1)
- Eletronics Lab Report - Rectifier CircuitDocument4 paginiEletronics Lab Report - Rectifier CircuitThan Lwin Aung93% (14)
- CE828 C86 D 01Document76 paginiCE828 C86 D 01Than Lwin AungÎncă nu există evaluări
- English Practice 1: C. Carried D. Sugar B. Underline A. Danger A. CharacterDocument3 paginiEnglish Practice 1: C. Carried D. Sugar B. Underline A. Danger A. CharacterKeisaÎncă nu există evaluări
- Statistics in Experimental Research: Mark Anthony F. Casimiro Marikina Science High School-JHSDocument32 paginiStatistics in Experimental Research: Mark Anthony F. Casimiro Marikina Science High School-JHSJeanne Emerose TalabuconÎncă nu există evaluări
- UNIT-3 Biodiversity and Biotic Resources:: 1 Genetic DiversityDocument4 paginiUNIT-3 Biodiversity and Biotic Resources:: 1 Genetic DiversityMansour Controversial KhanÎncă nu există evaluări
- End of Semester ReflectionDocument3 paginiEnd of Semester Reflectionapi-242745290Încă nu există evaluări
- Online Indian Astrology, Indian Vedic Astrology, Future Predictions, Horoscopes, Astrological Remedies, Astrological Solutions 271015Document5 paginiOnline Indian Astrology, Indian Vedic Astrology, Future Predictions, Horoscopes, Astrological Remedies, Astrological Solutions 271015jaithilagarajÎncă nu există evaluări
- Eldritch HighDocument39 paginiEldritch HighGabriel AlvarezÎncă nu există evaluări
- Lesson 2: IGSS System Overview: Interactive Graphical SCADA SystemDocument7 paginiLesson 2: IGSS System Overview: Interactive Graphical SCADA SystemRoberto CarrascoÎncă nu există evaluări
- Btstack Gettingstarted 1.1Document51 paginiBtstack Gettingstarted 1.1Christian WangÎncă nu există evaluări
- Digitel SignatureDocument21 paginiDigitel Signatureapi-3746880Încă nu există evaluări
- Formalization of UML Use Case Diagram-A Z Notation Based ApproachDocument6 paginiFormalization of UML Use Case Diagram-A Z Notation Based ApproachAnonymous PQ4M0ZzG7yÎncă nu există evaluări
- Master Pages:: Creating A Site-Wide Layout Using Master PagesDocument18 paginiMaster Pages:: Creating A Site-Wide Layout Using Master PagesCarlos LopezÎncă nu există evaluări
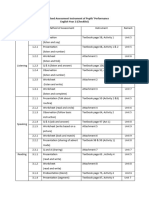
- Penyelarasan Instrumen Pentaksiran PBD Tahun 2 2024Document2 paginiPenyelarasan Instrumen Pentaksiran PBD Tahun 2 2024Hui YingÎncă nu există evaluări
- Angry Bird Red Paercraft 3dfancyDocument8 paginiAngry Bird Red Paercraft 3dfancymixemeyartÎncă nu există evaluări
- Usm StanDocument5 paginiUsm StanClaresta JaniceÎncă nu există evaluări
- Jigs BatacDocument28 paginiJigs BatacZab Robledo RiveraÎncă nu există evaluări
- Unep Fao RC Crc.9 Inf 4.enDocument85 paginiUnep Fao RC Crc.9 Inf 4.enThiwakkaran MuaganÎncă nu există evaluări
- Curriculum: (R. A. 10533/ K-12 EBEP)Document16 paginiCurriculum: (R. A. 10533/ K-12 EBEP)Diyonata KortezÎncă nu există evaluări
- P 1075 Basic E 03 - 08Document2 paginiP 1075 Basic E 03 - 08Marco Andres Saldias SagredoÎncă nu există evaluări
- If The fYR of "Macedonia" Needs A Lie in Order To Exist, Its Existence Is Redundant by M.A.TemplarDocument157 paginiIf The fYR of "Macedonia" Needs A Lie in Order To Exist, Its Existence Is Redundant by M.A.TemplarMakedonas Akritas50% (4)
- Wcee2012 4133Document10 paginiWcee2012 4133toyi kamiÎncă nu există evaluări
- SAP SD ConsultantDocument5 paginiSAP SD Consultantneverever143Încă nu există evaluări
- Simple Stress & StrainDocument34 paginiSimple Stress & StrainfaisalasgharÎncă nu există evaluări
- Resumen CronoamperometríaDocument3 paginiResumen Cronoamperometríabettypaz89Încă nu există evaluări
- (One Village One Product) Berbasis KoperasiDocument11 pagini(One Village One Product) Berbasis KoperasiIndah Kumala SariÎncă nu există evaluări
- Dem Watershed DelineationDocument43 paginiDem Watershed DelineationHamse HusseinÎncă nu există evaluări
- Master of Business Administration - MBA Semester 3 ProjectDocument2 paginiMaster of Business Administration - MBA Semester 3 ProjectAnkur SharmaÎncă nu există evaluări
- The Filipino Family Today: A Sociological Perspective: Mark Godwin B. Villareal Adamson UniversityDocument48 paginiThe Filipino Family Today: A Sociological Perspective: Mark Godwin B. Villareal Adamson UniversityAmanda Alejo SalamancaÎncă nu există evaluări
- Nij 0115.00Document46 paginiNij 0115.00officerfrankÎncă nu există evaluări
- Marking Criteria For Paper 2 (PMR)Document7 paginiMarking Criteria For Paper 2 (PMR)nitamansÎncă nu există evaluări
- Quantitative Aptitude For Competitive Exams (WWW - Sarkaripost.in) PDFDocument137 paginiQuantitative Aptitude For Competitive Exams (WWW - Sarkaripost.in) PDFgencoÎncă nu există evaluări