S-ar putea să vă placă și
- TP Asservissemet Lineaire l3 Licence Genie Biomedical1 Semestre5Document17 paginiTP Asservissemet Lineaire l3 Licence Genie Biomedical1 Semestre5moha100% (1)
- TP 1 COMPTE RENDU AUTOMATIQUEDocument9 paginiTP 1 COMPTE RENDU AUTOMATIQUETwati Ala0% (1)
- Compte Rendu Des TP de La RegulationDocument23 paginiCompte Rendu Des TP de La Regulationomaima hamaniÎncă nu există evaluări
- Correction TP1 PDFDocument8 paginiCorrection TP1 PDFmehdi aoues100% (1)
- Introduction Au Redressement Monophase Non CommandeDocument10 paginiIntroduction Au Redressement Monophase Non CommandeSousou SaidiÎncă nu există evaluări
- Compte Rendu Sys Asservis PDFDocument21 paginiCompte Rendu Sys Asservis PDFKhalîl Ðkhílí100% (1)
- TP1 Réponses Fréquentielles Et Identification Des SystèmesDocument3 paginiTP1 Réponses Fréquentielles Et Identification Des SystèmesYahiyaoui SofyaneÎncă nu există evaluări
- TP Asservissement Réponse Fréquentielles Et IdentificationDocument10 paginiTP Asservissement Réponse Fréquentielles Et IdentificationAzou Azzeddine AzzeddineÎncă nu există evaluări
- 4-Analyse Frequentielle Des Systemes LineairesDocument14 pagini4-Analyse Frequentielle Des Systemes LineairesBouallegue Mounir100% (2)
- Compte Rendu Tp 3 ضسسثقDocument8 paginiCompte Rendu Tp 3 ضسسثقMer Oua33% (3)
- TP N 02 CommandeDocument5 paginiTP N 02 CommandeAchraf Mohamed BensaadaÎncă nu există evaluări
- Rapport TP 1 Et 2Document31 paginiRapport TP 1 Et 2treda79% (39)
- TP3 Systemes Premier OrdreDocument5 paginiTP3 Systemes Premier Ordreisl dz100% (1)
- TP Retour D'étatDocument3 paginiTP Retour D'étatDamon Salvatore73% (11)
- Systèmes Du Second OrdreDocument6 paginiSystèmes Du Second Ordretrawri007Încă nu există evaluări
- TP1 Commande Des Machines Electrique Simulation de MCCDocument15 paginiTP1 Commande Des Machines Electrique Simulation de MCCSabri Loucif50% (2)
- TP Circuits TriphasésDocument17 paginiTP Circuits TriphasésMike Bravo Hotel100% (7)
- Compte Rendu-MoteurDocument7 paginiCompte Rendu-MoteurAmine Cheurfa0% (1)
- TP 01-API .L3 AutomatiqueDocument19 paginiTP 01-API .L3 Automatiqueothmane ABDELADIMÎncă nu există evaluări
- Compte Rendu TP 1 CAODocument8 paginiCompte Rendu TP 1 CAOOussama EttahiriÎncă nu există evaluări
- TP2 La Régulation TachymétriqueDocument8 paginiTP2 La Régulation TachymétriqueBounegab Youcef75% (4)
- Solution TP AsservissementDocument9 paginiSolution TP Asservissementali18abid86% (7)
- Compte Rendu TP 3 EPDocument10 paginiCompte Rendu TP 3 EPKéran NTOUTOUME MVENGÎncă nu există evaluări
- TD1 (Ex & Sol)Document18 paginiTD1 (Ex & Sol)Younes Raache75% (4)
- TP 2 AsserviDocument5 paginiTP 2 AsserviAhmed Kramdi100% (1)
- Compte-Rendu-Tp-Redresseur Commandés Et Non CommandésDocument12 paginiCompte-Rendu-Tp-Redresseur Commandés Et Non CommandésYasmine HammamiÎncă nu există evaluări
- TP Puissance 5Document13 paginiTP Puissance 5Samah Boughanem100% (2)
- TD 1 Solution Régulation industrielle-2017-BFDocument27 paginiTD 1 Solution Régulation industrielle-2017-BFamine milano100% (2)
- TP AsservissementDocument17 paginiTP Asservissementhaythem mokdedÎncă nu există evaluări
- TD Automatique 1A 2016 JMD 2Document20 paginiTD Automatique 1A 2016 JMD 2Adil ChentoufÎncă nu există evaluări
- Compte Rendu N1 (Moteur Electrique)Document22 paginiCompte Rendu N1 (Moteur Electrique)Khalil homraniÎncă nu există evaluări
- TP Automatique MATLABDocument27 paginiTP Automatique MATLABZhor Ezzaam75% (8)
- TD2 Régulation-Asservissement Sept2019Document5 paginiTD2 Régulation-Asservissement Sept2019TECHNOLOGIES MODERNES DU CAMEROUNÎncă nu există evaluări
- Correction Régulation de Vitesse D'une MCC À Courant DCDocument13 paginiCorrection Régulation de Vitesse D'une MCC À Courant DCjmroussel82% (11)
- TP AUTOMATIQUE: Utilisation de SimulinkDocument8 paginiTP AUTOMATIQUE: Utilisation de SimulinkAlaeddine Aoidhi100% (1)
- TD N°2 Régulateur Tout Ou Rien (TOR) .-ConvertiDocument3 paginiTD N°2 Régulateur Tout Ou Rien (TOR) .-ConvertiMãl Îk100% (1)
- TD 7 (Ex & Sol)Document8 paginiTD 7 (Ex & Sol)aymen sayoudÎncă nu există evaluări
- Modélisation Et Simulation Du Moteur À Courant ContinuDocument5 paginiModélisation Et Simulation Du Moteur À Courant Continuعثمان عثمان100% (1)
- Sujets TD AutomatiqueDocument51 paginiSujets TD Automatiquekarim belaliaÎncă nu există evaluări
- Représentation D'état - EhtpDocument94 paginiReprésentation D'état - EhtpAbiadiÎncă nu există evaluări
- tp3 Automatique PDFDocument11 paginitp3 Automatique PDFSamah BoughanemÎncă nu există evaluări
- TpAsserv 2015Document35 paginiTpAsserv 2015Ahmed Msf100% (6)
- TP - Gegm-2021Document11 paginiTP - Gegm-2021Houssam LhmiriÎncă nu există evaluări
- Département Génie Electrique: I S É R TDocument4 paginiDépartement Génie Electrique: I S É R THend ChammamÎncă nu există evaluări
- TP 4 Etude Moteur Asynchrone Triphase Rotor BobineDocument8 paginiTP 4 Etude Moteur Asynchrone Triphase Rotor BobineAmiir AmirÎncă nu există evaluări
- 3-Analyse Temporelle Des Systemes Lineaires PDFDocument8 pagini3-Analyse Temporelle Des Systemes Lineaires PDFBouallegue MounirÎncă nu există evaluări
- TP Régulation de TemperatureDocument10 paginiTP Régulation de Temperaturefeed me up100% (1)
- TP 3Document8 paginiTP 3kima lachgarÎncă nu există evaluări
- Chapitre 3Document9 paginiChapitre 3anasÎncă nu există evaluări
- TP 01 Onduleur MonophaseDocument1 paginăTP 01 Onduleur MonophaseAb CdÎncă nu există evaluări
- TD N°3 Réponse Temporelle Des Systèmes Linéaires: Exercice 1Document7 paginiTD N°3 Réponse Temporelle Des Systèmes Linéaires: Exercice 1Nasro SiotousÎncă nu există evaluări
- TP03: Détermination Des Paramètres D'un Alternateur (Génératrice Synchrone) IDocument5 paginiTP03: Détermination Des Paramètres D'un Alternateur (Génératrice Synchrone) IBrâ Hïm0% (1)
- I. Modélisation Du Moteur À Courant ContinuDocument3 paginiI. Modélisation Du Moteur À Courant ContinuJessy100% (1)
- TP1 - Redresseur P1 Commandé Et Non CommandéDocument5 paginiTP1 - Redresseur P1 Commandé Et Non Commandéamina sayah0% (1)
- 1/ Objectifs Du TP:: Tabilite Des Systemes AsservisDocument3 pagini1/ Objectifs Du TP:: Tabilite Des Systemes Asservisbouzida ilyesÎncă nu există evaluări
- Chapitre VDocument7 paginiChapitre VISLAM EDINEÎncă nu există evaluări
- TP3 Asservissement PDFDocument8 paginiTP3 Asservissement PDFYoucef BoukhalfaÎncă nu există evaluări
- Représentation D'état Des SystèmesDocument2 paginiReprésentation D'état Des SystèmesQudýmãt Áhmèd100% (1)
- ChapFinal AsservissmentDocument9 paginiChapFinal AsservissmentChris ShulzÎncă nu există evaluări
- Examen Elet 2 2016 2017Document2 paginiExamen Elet 2 2016 2017kima lachgarÎncă nu există evaluări
- Travaux Pratiques N 3: Calcul Du Champ Dans Un Circuit MagnétiqueDocument4 paginiTravaux Pratiques N 3: Calcul Du Champ Dans Un Circuit Magnétiquekima lachgarÎncă nu există evaluări
- TP 1+2 Associations Convertisseurs Lachgar HakimaDocument13 paginiTP 1+2 Associations Convertisseurs Lachgar Hakimakima lachgarÎncă nu există evaluări
- Bekhouche Hassiba Lachgar Hakima: Commande Par Retour D'état Du Système DiscretDocument17 paginiBekhouche Hassiba Lachgar Hakima: Commande Par Retour D'état Du Système Discretkima lachgarÎncă nu există evaluări
- Tdn°3 MSRBDocument1 paginăTdn°3 MSRBkima lachgarÎncă nu există evaluări
- Moteur À Excitation Série) : TP5: Simulation Du Modèle de Machine À Courant Continu MCCDocument2 paginiMoteur À Excitation Série) : TP5: Simulation Du Modèle de Machine À Courant Continu MCCkima lachgarÎncă nu există evaluări
- Devoir Lachgar HakimaDocument2 paginiDevoir Lachgar Hakimakima lachgarÎncă nu există evaluări
- CalcDocument13 paginiCalcMehdiTouki100% (1)
- Methode Numerique en JavaDocument230 paginiMethode Numerique en JavamauricetappaÎncă nu există evaluări
- TP HGHGDocument4 paginiTP HGHGkima lachgarÎncă nu există evaluări
- TP 01Document6 paginiTP 01kima lachgarÎncă nu există evaluări
- 2eme PNR-2021Document13 pagini2eme PNR-2021kima lachgarÎncă nu există evaluări
- Le Devoir N4Document1 paginăLe Devoir N4kima lachgarÎncă nu există evaluări
- 05 BodeDocument43 pagini05 BodeAbdessamad FarajiÎncă nu există evaluări
- Serie Exercice GrafcetDocument9 paginiSerie Exercice Grafcetkima lachgar100% (3)
- Commande Machine A CC, Par Maatar Nadir & BensekhriaDocument107 paginiCommande Machine A CC, Par Maatar Nadir & Bensekhriachnaider100% (30)
- Commande D'une Machine À Courant Continu À Vitesse VariableDocument30 paginiCommande D'une Machine À Courant Continu À Vitesse VariableSue Chamieh90% (10)
- L'Utilisation Des Supraconducteurs Pour Le Stockage Et La Decharge de L'Energie ElectriqueDocument105 paginiL'Utilisation Des Supraconducteurs Pour Le Stockage Et La Decharge de L'Energie Electriquekima lachgarÎncă nu există evaluări
- Ajp-Rphysap 1986 21 11 649 0Document10 paginiAjp-Rphysap 1986 21 11 649 0kima lachgarÎncă nu există evaluări
- Projet Hakima HichemDocument12 paginiProjet Hakima Hichemmiss khanÎncă nu există evaluări
- Chapitre 2Document9 paginiChapitre 2kima lachgarÎncă nu există evaluări
- Serie Exercice GrafcetDocument9 paginiSerie Exercice Grafcetkima lachgar100% (3)
- Poly CopeDocument43 paginiPoly Copekima lachgarÎncă nu există evaluări
- Série de TD1 (MM)Document2 paginiSérie de TD1 (MM)kima lachgarÎncă nu există evaluări
- Convertisseur BuckDocument28 paginiConvertisseur BuckDave KrauserÎncă nu există evaluări
- Corrigé Type Production 2018Document2 paginiCorrigé Type Production 2018kima lachgarÎncă nu există evaluări
- Poly CopeDocument43 paginiPoly Copekima lachgarÎncă nu există evaluări
- Exam Reseaux18Document1 paginăExam Reseaux18kima lachgarÎncă nu există evaluări
- Corrigé Type Sécurité 2018Document1 paginăCorrigé Type Sécurité 2018kima lachgarÎncă nu există evaluări
- Exam Reseaux18Document1 paginăExam Reseaux18kima lachgarÎncă nu există evaluări
- Cours Systemes de Transmission de MouvementDocument5 paginiCours Systemes de Transmission de MouvementdjalikadjouÎncă nu există evaluări
- Bascules SynchronesDocument7 paginiBascules SynchronesMohamed Ben FredjÎncă nu există evaluări
- Favre-Bonvin, Arpin, Brevard - 1976 - Structure de La Mycosporine (P310) PDFDocument9 paginiFavre-Bonvin, Arpin, Brevard - 1976 - Structure de La Mycosporine (P310) PDFPriscila TorresÎncă nu există evaluări
- TP BDV 2016Document17 paginiTP BDV 2016Khabtane AbdelhamidÎncă nu există evaluări
- Cours Probabilités (Chapitre 1 - Analyse Combinatoire)Document41 paginiCours Probabilités (Chapitre 1 - Analyse Combinatoire)Khadija Dia100% (1)
- FX808394F FlexES Control FX10 (10 Boucles)Document1 paginăFX808394F FlexES Control FX10 (10 Boucles)Ramdane RamdanoÎncă nu există evaluări
- Crabol XXIV-3Document2 paginiCrabol XXIV-3Pham Van DuongÎncă nu există evaluări
- Alimentations StatiquesDocument16 paginiAlimentations StatiquesKdr Khair-Eddine100% (1)
- Enrobage EC2Document7 paginiEnrobage EC2Abdelkader Drr100% (1)
- Composition de 3ètrim MathsDocument2 paginiComposition de 3ètrim Mathsnaababaongo052Încă nu există evaluări
- 1-html CssDocument88 pagini1-html CssSouleymane TraoreÎncă nu există evaluări
- 0-Rappel Langage SQLDocument4 pagini0-Rappel Langage SQLaminehosnyÎncă nu există evaluări
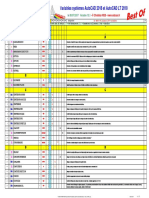
- Variables Systemes AutoCAD 2Mxx-BEST of VARIABLESDocument7 paginiVariables Systemes AutoCAD 2Mxx-BEST of VARIABLESazeÎncă nu există evaluări
- Mem Corr AndriantavyDocument66 paginiMem Corr AndriantavyWael TrabelsiÎncă nu există evaluări
- NPS - VPN Sous Windows2012 ServerDocument19 paginiNPS - VPN Sous Windows2012 ServerAKUEÎncă nu există evaluări
- Cours AngularDocument44 paginiCours Angularyosri grira100% (1)
- QCM 5Document2 paginiQCM 5HAPMRIÎncă nu există evaluări
- ADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jDocument1 paginăADE - UHA 2022-2023 (Alioune-Badara-Ibn - Diene@uha - FR) - 6.6.4jAlioune Badara Ibn Abu Talib DièneÎncă nu există evaluări
- Controle 1 - 4 S1 PC 1bac FRDocument3 paginiControle 1 - 4 S1 PC 1bac FRbrinimed06gmail.comÎncă nu există evaluări
- CCNA 02 Introduction À l'IOSDocument138 paginiCCNA 02 Introduction À l'IOSyikhlefÎncă nu există evaluări
- ParetoDocument13 paginiParetoIkram El GhazouaniÎncă nu există evaluări
- Examen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Document4 paginiExamen1+Solution Microcontrà Leurs Et Microprocesseurs - PDF  Version 1Chaima BellatÎncă nu există evaluări
- TP E P RedresseurDocument5 paginiTP E P RedresseurRafik BouhennacheÎncă nu există evaluări
- MEMOIRE Samer MoussaDocument94 paginiMEMOIRE Samer Moussatoni JabbourÎncă nu există evaluări
- Macro ImportDocument29 paginiMacro ImportKamil ChamÎncă nu există evaluări
- Ifr AttDocument9 paginiIfr AttpatrouilledeafranceÎncă nu există evaluări
- PLE CoursDocument95 paginiPLE CoursFranck-Olivier KassouÎncă nu există evaluări
- Pvsyst Evaluation: Pvsyst - Rapport de SimulationDocument7 paginiPvsyst Evaluation: Pvsyst - Rapport de Simulationidriss habibiÎncă nu există evaluări
- Cours Matlab 2020Document55 paginiCours Matlab 2020soufianealjahid523Încă nu există evaluări
- Remerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonDocument42 paginiRemerciements: Kabou Saleh Eddine Pour Sa Disponibilite A' Superviser MonOMAE01Încă nu există evaluări