S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- PaccarServiceManual2005 2010Document189 paginiPaccarServiceManual2005 2010Eric Porter100% (19)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Review Review Review Review M M M M Ssss OHE OHE OHE OHEDocument61 paginiReview Review Review Review M M M M Ssss OHE OHE OHE OHETushar100% (2)
- Lab Manual Switchgear and Protection SapDocument46 paginiLab Manual Switchgear and Protection SapYash MaheshwariÎncă nu există evaluări
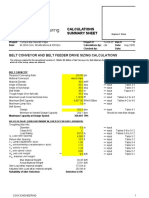
- Belt Conveyors With Shaft SizingDocument5 paginiBelt Conveyors With Shaft SizingRakhi Mor100% (2)
- Specs PyroLance L 1000 WG Sept 2015Document9 paginiSpecs PyroLance L 1000 WG Sept 2015Forum PompieriiÎncă nu există evaluări
- Gts-150 Operation Manual 08 VerDocument329 paginiGts-150 Operation Manual 08 VersunhuynhÎncă nu există evaluări
- American Wire Gauge (AWG)Document8 paginiAmerican Wire Gauge (AWG)Marija DjenicÎncă nu există evaluări
- LED Series ResistanceDocument10 paginiLED Series ResistanceKramyer Rabanillo100% (1)
- Weishaupt Valve Proving System VPS 504S2Document6 paginiWeishaupt Valve Proving System VPS 504S2diab ali100% (1)
- Mine Venting DuctDocument28 paginiMine Venting DuctSergej SchlegelÎncă nu există evaluări
- Bicycle Sprayer Machine: Major Project Report Submitted in Partial Fulfilment For The Award ofDocument24 paginiBicycle Sprayer Machine: Major Project Report Submitted in Partial Fulfilment For The Award ofashi ashiÎncă nu există evaluări
- Orbital X: Modular ProgramDocument48 paginiOrbital X: Modular Programshahrol effendy rodziÎncă nu există evaluări
- ML411A Solar Marine LanternDocument12 paginiML411A Solar Marine Lanternjetr19754106Încă nu există evaluări
- CONTRACT - JAP006-D73 132/11kV PALM, JUMEIRAH S/S (4 Nos) 11Kv Switchgear VT CalculationDocument6 paginiCONTRACT - JAP006-D73 132/11kV PALM, JUMEIRAH S/S (4 Nos) 11Kv Switchgear VT CalculationmadhavanÎncă nu există evaluări
- Brochure l45f t3 en 21 20000742 CDocument16 paginiBrochure l45f t3 en 21 20000742 CKonrad MatuszkiewiczÎncă nu există evaluări
- Technical Data: G2750SMU5Document3 paginiTechnical Data: G2750SMU5Wilman Elias Gutierrez RadaÎncă nu există evaluări
- List of Equipment: Procedures Manual On Utpras Unified TVET Program Registration and Accreditation SystemDocument3 paginiList of Equipment: Procedures Manual On Utpras Unified TVET Program Registration and Accreditation SystemRichardÎncă nu există evaluări
- Hazard Study 4 - Compress AirDocument12 paginiHazard Study 4 - Compress AirSaran rasayaÎncă nu există evaluări
- Rail Injector Girs12: FeaturesDocument2 paginiRail Injector Girs12: FeaturesAndrea VaccariÎncă nu există evaluări
- INIM Catalogo Incendio ENG Rev3.00 MediumRes PDFDocument76 paginiINIM Catalogo Incendio ENG Rev3.00 MediumRes PDFnedzadÎncă nu există evaluări
- Single PhasingDocument22 paginiSingle PhasingAakarsh Rastogi100% (2)
- Upmo, Ovcpd Uplb: The Electrical Services SectionDocument24 paginiUpmo, Ovcpd Uplb: The Electrical Services SectionMickiee OracionÎncă nu există evaluări
- Samsung ProRo4u TV Service ManualDocument174 paginiSamsung ProRo4u TV Service ManualAdrian AguilarÎncă nu există evaluări
- Various ToolRoomDocument18 paginiVarious ToolRoomToshang SharmaÎncă nu există evaluări
- Computer Systems ServicingDocument13 paginiComputer Systems ServicingLoli Gonzales ArtiagaÎncă nu există evaluări
- Capacitor Technologies Characterization Selection and Packaging For Next-Generation Power Electronics ApplicationsDocument11 paginiCapacitor Technologies Characterization Selection and Packaging For Next-Generation Power Electronics Applicationssueng666Încă nu există evaluări
- ZXM8 TPLDD120 600Document2 paginiZXM8 TPLDD120 600SOLUCIONES ENERGETICAS Y PROCESOS INNOVADORESÎncă nu există evaluări
- PSC LoadGuider Datasheet - 2020Document1 paginăPSC LoadGuider Datasheet - 2020Project Sales CorpÎncă nu există evaluări
- Airless TireDocument12 paginiAirless TireLaxmipriya SenapatiÎncă nu există evaluări
- Presentation PERU IEC Ex Brasil 2013-Set-18Document20 paginiPresentation PERU IEC Ex Brasil 2013-Set-18Oliver A. Chura QuispeÎncă nu există evaluări