S-ar putea să vă placă și
- Proposal For Funding of Computer Programme (NASS)Document6 paginiProposal For Funding of Computer Programme (NASS)Foster Boateng67% (3)
- Problem Solutions Becker String TheoryDocument129 paginiProblem Solutions Becker String Theorybanedog100% (2)
- The Integer L-Shaped Method For Stochastic Integer Programs With Complete Recourse PDFDocument10 paginiThe Integer L-Shaped Method For Stochastic Integer Programs With Complete Recourse PDFRoger RodríguezÎncă nu există evaluări
- Unit 11 LeadershipDocument4 paginiUnit 11 LeadershipMarijana DragašÎncă nu există evaluări
- 1960 Max: Qu, Antixing For Minimum Distortion 7Document6 pagini1960 Max: Qu, Antixing For Minimum Distortion 7Chathura LakmalÎncă nu există evaluări
- MLMC FounderDocument10 paginiMLMC FoundersaadonÎncă nu există evaluări
- Experiment-5 Evaluating The Fourier Coefficients of Square WaveDocument25 paginiExperiment-5 Evaluating The Fourier Coefficients of Square WaveKartikÎncă nu există evaluări
- CS 229, Spring 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Document8 paginiCS 229, Spring 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Achuthan SekarÎncă nu există evaluări
- CS 229, Autumn 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)Document8 paginiCS 229, Autumn 2016 Problem Set #1: Supervised Learning: m −y θ x m θ (i) (i)patrickÎncă nu există evaluări
- 1 s2.0 S0898122106002021 MainDocument12 pagini1 s2.0 S0898122106002021 MainTubagus RobbiÎncă nu există evaluări
- Solving Nonlinear Algebraic Systems Using Artificial Neural NetworksDocument13 paginiSolving Nonlinear Algebraic Systems Using Artificial Neural NetworksAthanasios MargarisÎncă nu există evaluări
- (Barrientos O.) A Branch and Bound Method For SolvDocument17 pagini(Barrientos O.) A Branch and Bound Method For SolvM Najib SinggihÎncă nu există evaluări
- Convergence Rates in Weighted L Spaces of Kernel Density Estimators For Linear ProcessesDocument13 paginiConvergence Rates in Weighted L Spaces of Kernel Density Estimators For Linear ProcessesTomi DimovskiÎncă nu există evaluări
- Variational machine learning problems solved with finite elementsDocument11 paginiVariational machine learning problems solved with finite elementsJohn David ReaverÎncă nu există evaluări
- Airy-based equilibrium mesh-free method for static limit analysis of plane problems_1171445Document13 paginiAiry-based equilibrium mesh-free method for static limit analysis of plane problems_1171445Phạm Thị Ánh TuyếtÎncă nu există evaluări
- Near Optimal Thresholding Estimation of A Poisson Intensity On The Real LineDocument36 paginiNear Optimal Thresholding Estimation of A Poisson Intensity On The Real LineEduardo Salgado EnríquezÎncă nu există evaluări
- Compressive Wave Computation Using Sparse Eigenfunction ExpansionDocument45 paginiCompressive Wave Computation Using Sparse Eigenfunction ExpansionmrfintrÎncă nu există evaluări
- J.Thi-Qar Sci. Vol.3 (2) Feb./2012Document15 paginiJ.Thi-Qar Sci. Vol.3 (2) Feb./2012Kanthavel ThillaiÎncă nu există evaluări
- A Nystrom Method For A Class of FredholmDocument20 paginiA Nystrom Method For A Class of FredholmAydinel HakanÎncă nu există evaluări
- Analyzing Smooth Polynomials over Finite FieldsDocument11 paginiAnalyzing Smooth Polynomials over Finite FieldsShreerang ThergaonkarÎncă nu există evaluări
- Dynamic Programming Principles PDFalgorithmDocument16 paginiDynamic Programming Principles PDFalgorithmSonia SaradouniÎncă nu există evaluări
- A General Model For Fuzzy Linear ProgrammingDocument9 paginiA General Model For Fuzzy Linear ProgrammingPrashant GuptaÎncă nu există evaluări
- Andersson Djehiche - AMO 2011Document16 paginiAndersson Djehiche - AMO 2011artemischen0606Încă nu există evaluări
- Lecture 5-6: Separable Positive Definite Energetic Space Linear Dense Energetic Functional LemmaDocument26 paginiLecture 5-6: Separable Positive Definite Energetic Space Linear Dense Energetic Functional LemmaBittuÎncă nu există evaluări
- Navier Stokes Eq.Document58 paginiNavier Stokes Eq.Anthoni Raj100% (1)
- Research StatementDocument5 paginiResearch StatementEmad AbdurasulÎncă nu există evaluări
- Flatness and Motion Planning: The Car With: N TrailersDocument6 paginiFlatness and Motion Planning: The Car With: N TrailersgeneralgrievousÎncă nu există evaluări
- Calculating Fourier SeriesDocument14 paginiCalculating Fourier Seriesapi-3747235Încă nu există evaluări
- 1993 Asymptotic 20 Properties 20 in 20 Dynamic 20 ProgrammingDocument12 pagini1993 Asymptotic 20 Properties 20 in 20 Dynamic 20 ProgrammingTahamid Hasan.Încă nu există evaluări
- Complex PDEs Reduced to Integral EquationsDocument12 paginiComplex PDEs Reduced to Integral EquationsJohn Ticona EscobarÎncă nu există evaluări
- Lempa 2012Document28 paginiLempa 2012fgÎncă nu există evaluări
- IJNAA - Volume 3 - Issue 1 - Pages 61-67Document7 paginiIJNAA - Volume 3 - Issue 1 - Pages 61-67Mohammad RoshaniÎncă nu există evaluări
- Solving The Travelling Salesman Problem With A Hopfield - Type Neural NetworkDocument18 paginiSolving The Travelling Salesman Problem With A Hopfield - Type Neural NetworkWafa ElgalhoudÎncă nu există evaluări
- Physics 509: Numerical Methods For Bayesian Analyses: Scott Oser Lecture #15 November 4, 2008Document32 paginiPhysics 509: Numerical Methods For Bayesian Analyses: Scott Oser Lecture #15 November 4, 2008OmegaUserÎncă nu există evaluări
- Applied Linear Algebra and Numerical AnalysisDocument159 paginiApplied Linear Algebra and Numerical AnalysisavishwasÎncă nu există evaluări
- Adapting To Unknown Smoothness Via Wavelet ShrinkageDocument28 paginiAdapting To Unknown Smoothness Via Wavelet ShrinkagejebileeÎncă nu există evaluări
- Lecture 5Document13 paginiLecture 5kostas_ntougias5453Încă nu există evaluări
- Assigment ProblemDocument30 paginiAssigment ProblemplanetmarsÎncă nu există evaluări
- Solving Elliptic PDEs with Finite DifferencesDocument18 paginiSolving Elliptic PDEs with Finite DifferencesJuanParedesCasasÎncă nu există evaluări
- 02 StieltjesDocument12 pagini02 StieltjesBaya TellaiÎncă nu există evaluări
- aPDEs PAN2008 - UnknownDocument107 paginiaPDEs PAN2008 - Unknownepie essongolle godfredÎncă nu există evaluări
- Estimation of Time-Varying Par in STAT Models - Bertsimas Et - Al. (1999) - PUBDocument21 paginiEstimation of Time-Varying Par in STAT Models - Bertsimas Et - Al. (1999) - PUBWaisak Purnomo HÎncă nu există evaluări
- CS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement LearningDocument5 paginiCS 229, Public Course Problem Set #4: Unsupervised Learning and Re-Inforcement Learningsuhar adiÎncă nu există evaluări
- Arena Stanfordlecturenotes11Document9 paginiArena Stanfordlecturenotes11Victoria MooreÎncă nu există evaluări
- Calculation and Modelling of Radar Performance 4 Fourier TransformsDocument25 paginiCalculation and Modelling of Radar Performance 4 Fourier TransformsmmhoriiÎncă nu există evaluări
- Integer ProgrammingDocument5 paginiInteger ProgrammingChris Johnson100% (6)
- Spatial Point Density Estimation TechniquesDocument63 paginiSpatial Point Density Estimation TechniquesJohnÎncă nu există evaluări
- Eshkuvatov, Z. K. 87 103Document17 paginiEshkuvatov, Z. K. 87 103Erwin RojasÎncă nu există evaluări
- Introduction To Hilbert Spaces. I.: (KS) G. Sparr, A Sparr: "Kontinuerliga System", Studentliterature, Lund (2000)Document5 paginiIntroduction To Hilbert Spaces. I.: (KS) G. Sparr, A Sparr: "Kontinuerliga System", Studentliterature, Lund (2000)Anonymous PkeI8e84RsÎncă nu există evaluări
- Renormalization Group and The Ginzburg-Landau Equation: Mathematical PhysicsDocument16 paginiRenormalization Group and The Ginzburg-Landau Equation: Mathematical PhysicsNikos PapanikolaouÎncă nu există evaluări
- Minimizing Total Water Shortage Cost Using Linear ProgrammingDocument42 paginiMinimizing Total Water Shortage Cost Using Linear Programmingchotakamal3625Încă nu există evaluări
- Nonlinear Wavelet Image Processing - Variational Problems, Compression, and Noise Removal Through Wavelet ShrinkageDocument23 paginiNonlinear Wavelet Image Processing - Variational Problems, Compression, and Noise Removal Through Wavelet ShrinkageCamila CedielÎncă nu există evaluări
- Approximation Solution of Fractional Partial Differential EquationsDocument8 paginiApproximation Solution of Fractional Partial Differential EquationsAdel AlmarashiÎncă nu există evaluări
- On The Numerical Solution of Fractional Partial Differential EquationsDocument12 paginiOn The Numerical Solution of Fractional Partial Differential EquationsAnonymous wJhO5dS9XzÎncă nu există evaluări
- Mark Rusi BolDocument55 paginiMark Rusi BolPat BustillosÎncă nu există evaluări
- Maximum Clique ProblemDocument28 paginiMaximum Clique ProblemJohnson CordeiroÎncă nu există evaluări
- MultivariableRegression SummaryDocument15 paginiMultivariableRegression SummaryAlada manaÎncă nu există evaluări
- Adapting To Unknown Smoothness: R. M. Castro May 20, 2011Document9 paginiAdapting To Unknown Smoothness: R. M. Castro May 20, 2011Raunak JainÎncă nu există evaluări
- Numerical Methods and Software For Sensitivity Analysis of Differential-Algebraic SystemsDocument23 paginiNumerical Methods and Software For Sensitivity Analysis of Differential-Algebraic SystemsFCÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Medical StoreDocument11 paginiMedical Storefriend4sp75% (4)
- Awareness Training On Filipino Sign Language (FSL) PDFDocument3 paginiAwareness Training On Filipino Sign Language (FSL) PDFEmerito PerezÎncă nu există evaluări
- LAWHIST - Week1 - Codamon Lim Tan PDFDocument32 paginiLAWHIST - Week1 - Codamon Lim Tan PDFMargell TanÎncă nu există evaluări
- Experiment 5 ADHAVANDocument29 paginiExperiment 5 ADHAVANManoj Raj RajÎncă nu există evaluări
- Para Kay BDocument1 paginăPara Kay BFeLy DipOn63% (8)
- Indian Archaeology 1967 - 68 PDFDocument69 paginiIndian Archaeology 1967 - 68 PDFATHMANATHANÎncă nu există evaluări
- Level 1:: Advanced Financial Modeler (Afm)Document23 paginiLevel 1:: Advanced Financial Modeler (Afm)munaftÎncă nu există evaluări
- 1402 2046Document11 pagini1402 2046Luca PilottiÎncă nu există evaluări
- FIRE Protection Engineering Winter 2002Document64 paginiFIRE Protection Engineering Winter 2002Hany RifaatÎncă nu există evaluări
- Limitations For The Study: Celebrity ViewsDocument3 paginiLimitations For The Study: Celebrity ViewsPakaya100% (2)
- The Way To Sell: Powered byDocument25 paginiThe Way To Sell: Powered bysagarsononiÎncă nu există evaluări
- Productivity in Indian Sugar IndustryDocument17 paginiProductivity in Indian Sugar Industryshahil_4uÎncă nu există evaluări
- Notes On Statement AssumptionDocument5 paginiNotes On Statement Assumptionsangamesh mbÎncă nu există evaluări
- Emotion and Decision Making: FurtherDocument28 paginiEmotion and Decision Making: FurtherUMAMA UZAIR MIRZAÎncă nu există evaluări
- Dravyaguna VijaDocument1.095 paginiDravyaguna VijaSilas Chagas100% (1)
- Great Mobile Application Requirement Document: 7 Steps To Write ADocument11 paginiGreat Mobile Application Requirement Document: 7 Steps To Write AgpchariÎncă nu există evaluări
- Bhavartha Ratnakara: ReferencesDocument2 paginiBhavartha Ratnakara: ReferencescrppypolÎncă nu există evaluări
- Radical Acceptance Guided Meditations by Tara Brach PDFDocument3 paginiRadical Acceptance Guided Meditations by Tara Brach PDFQuzzaq SebaÎncă nu există evaluări
- CV Jan 2015 SDocument4 paginiCV Jan 2015 Sapi-276142935Încă nu există evaluări
- Predict Y Scores Using Linear Regression EquationDocument6 paginiPredict Y Scores Using Linear Regression EquationreebenthomasÎncă nu există evaluări
- WMCS Algebraic Simplification Grade 8 v1.0Document76 paginiWMCS Algebraic Simplification Grade 8 v1.0Vincent MartinÎncă nu există evaluări
- 2009 IBP ElectionsDocument77 pagini2009 IBP ElectionsBaldovino VenturesÎncă nu există evaluări
- Photojournale - Connections Across A Human PlanetDocument75 paginiPhotojournale - Connections Across A Human PlanetjohnhorniblowÎncă nu există evaluări
- Revolute-Input Delta Robot DescriptionDocument43 paginiRevolute-Input Delta Robot DescriptionIbrahim EssamÎncă nu există evaluări
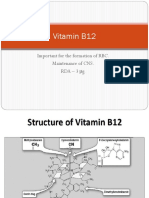
- Vitamin B12: Essential for RBC Formation and CNS MaintenanceDocument19 paginiVitamin B12: Essential for RBC Formation and CNS MaintenanceHari PrasathÎncă nu există evaluări
- Physics 401 Assignment # Retarded Potentials Solutions:: Wed. 15 Mar. 2006 - Finish by Wed. 22 MarDocument3 paginiPhysics 401 Assignment # Retarded Potentials Solutions:: Wed. 15 Mar. 2006 - Finish by Wed. 22 MarSruti SatyasmitaÎncă nu există evaluări
- People v. De Joya dying declaration incompleteDocument1 paginăPeople v. De Joya dying declaration incompletelividÎncă nu există evaluări
- Rak Single DentureDocument48 paginiRak Single Denturerakes0Încă nu există evaluări