S-ar putea să vă placă și
- Structural Health MonitoringDe la EverandStructural Health MonitoringDaniel BalageasÎncă nu există evaluări
- Vibration Signature of Defected Gear Tooth Using Spectral AnalysisDocument8 paginiVibration Signature of Defected Gear Tooth Using Spectral AnalysisHURRYSTARÎncă nu există evaluări
- Fluid Film Bearing Diagnostics Using Envelope SpectraDocument14 paginiFluid Film Bearing Diagnostics Using Envelope SpectraJose Luis RattiaÎncă nu există evaluări
- KKS For RNPPDocument5 paginiKKS For RNPPAtiqur RahmanÎncă nu există evaluări
- Csi - 2140 1 205Document205 paginiCsi - 2140 1 205Matias Fiascheti100% (1)
- CM3152 en SKF Idler Sound MonitorDocument4 paginiCM3152 en SKF Idler Sound MonitorLuisSilvaÎncă nu există evaluări
- Pump Technology Screwpumps l2 Series enDocument11 paginiPump Technology Screwpumps l2 Series enCamiloHernándezÎncă nu există evaluări
- Tutorial Diagnostics Randall PDFDocument84 paginiTutorial Diagnostics Randall PDFkfathi55Încă nu există evaluări
- Low Speed Fans Application Guide MiningDocument20 paginiLow Speed Fans Application Guide MiningsanthoshdonÎncă nu există evaluări
- Enpac 1200A User's GuideDocument154 paginiEnpac 1200A User's GuideAnonymous utxGVB5VyÎncă nu există evaluări
- Vibrations in A Francis Turbine A Case StudyDocument4 paginiVibrations in A Francis Turbine A Case Studybukit_guestÎncă nu există evaluări
- Cepstrum Analysis and Gearbox Fault Diagnosis - Bruel and Kaer PDFDocument21 paginiCepstrum Analysis and Gearbox Fault Diagnosis - Bruel and Kaer PDFbackvlackoÎncă nu există evaluări
- Effective Use of Statistical Models To Establish and Update Vibration AlarmDocument11 paginiEffective Use of Statistical Models To Establish and Update Vibration AlarmMohammadreza GalebanÎncă nu există evaluări
- VibrationDocument4 paginiVibrationzhyhh100% (1)
- Rotordynamic Insatability Problems in High-Performance TurbomachineryDocument454 paginiRotordynamic Insatability Problems in High-Performance TurbomachineryMounicaRasagyaPalla100% (2)
- Monitoring and Analysis of Machine VibrationDocument6 paginiMonitoring and Analysis of Machine VibrationAvinashÎncă nu există evaluări
- Vibration Analysis Rolling Element BearingDocument20 paginiVibration Analysis Rolling Element BearingmilaÎncă nu există evaluări
- Ams Machinery Manager v5 71 Installation Guide en 4236422 PDFDocument68 paginiAms Machinery Manager v5 71 Installation Guide en 4236422 PDFgspozoÎncă nu există evaluări
- Iso 13373 9 2017Document12 paginiIso 13373 9 2017ThejaswiniÎncă nu există evaluări
- Sleeve Bearing Diagnostics R1Document75 paginiSleeve Bearing Diagnostics R1Daniel_Ali_bÎncă nu există evaluări
- R&T 2008 - Principles and Practices of Vibrational Analysis - KeeferDocument64 paginiR&T 2008 - Principles and Practices of Vibrational Analysis - KeeferArnab De100% (1)
- Vibrasi AnalisisDocument72 paginiVibrasi AnalisisyogacruiseÎncă nu există evaluări
- Vibration Analysis Gt6 Generator LibyaDocument6 paginiVibration Analysis Gt6 Generator LibyaRohit GunerkarÎncă nu există evaluări
- Vibration ManualDocument32 paginiVibration Manualsayed1234Încă nu există evaluări
- Using PeakVue Plus Technology For Detecting Anti Friction Bearing FaultsDocument11 paginiUsing PeakVue Plus Technology For Detecting Anti Friction Bearing Faultseko bagus sunaryo100% (1)
- Phase Analysis: Making Vibration Analysis Easier: SearchDocument4 paginiPhase Analysis: Making Vibration Analysis Easier: Searchdillipsh123Încă nu există evaluări
- VFD PDFDocument26 paginiVFD PDFKamal ArreazaÎncă nu există evaluări
- Cardan Shaft AlignmentDocument26 paginiCardan Shaft AlignmentconstantinÎncă nu există evaluări
- Case Histories in Vibration Analysis and Metal Fatigue for the Practicing EngineerDe la EverandCase Histories in Vibration Analysis and Metal Fatigue for the Practicing EngineerEvaluare: 4.5 din 5 stele4.5/5 (3)
- Resonance - : A Condition Where The Natural Freq. of A Part Matches With Exciting Freq. and Creates Large VibrationsDocument8 paginiResonance - : A Condition Where The Natural Freq. of A Part Matches With Exciting Freq. and Creates Large Vibrationsrashm006ranjanÎncă nu există evaluări
- Explanation of False Versus True BrinellingDocument7 paginiExplanation of False Versus True BrinellingHaitham YoussefÎncă nu există evaluări
- Geometry of Screw Compressor Rotors and Their ToolsDocument17 paginiGeometry of Screw Compressor Rotors and Their ToolsPhox IndiaÎncă nu există evaluări
- SMP 7Document5 paginiSMP 7gullipalli srinivasa raoÎncă nu există evaluări
- G6600Document13 paginiG6600fazzlie100% (1)
- TN 13 Omnitrend ShortcutsDocument2 paginiTN 13 Omnitrend ShortcutsBrtonÎncă nu există evaluări
- Vertical Sleeve BearingsDocument6 paginiVertical Sleeve BearingsRakesh Nair A100% (1)
- Balance VibrationDocument4 paginiBalance VibrationZaidiÎncă nu există evaluări
- Stresses in Beams AdvancedDocument10 paginiStresses in Beams Advanceddeathes0% (1)
- Vibration Analysis of Gear Box.5-MilosprokoDocument3 paginiVibration Analysis of Gear Box.5-MilosprokoRavikiran Hegde100% (2)
- Don't Get Soft: Cover Series: Installation Best PracticesDocument6 paginiDon't Get Soft: Cover Series: Installation Best PracticesHatem Abdelrahman100% (1)
- TOMAS UsersManualDocument94 paginiTOMAS UsersManualrodruren01Încă nu există evaluări
- Pitfalls in The Analysis of Machinery Vibration MeasurementsDocument7 paginiPitfalls in The Analysis of Machinery Vibration MeasurementsTheerayoot PoomchaiÎncă nu există evaluări
- Bently Nevada, Manual Monitor Velocidade 3300Document96 paginiBently Nevada, Manual Monitor Velocidade 3300wagner machado de moraesÎncă nu există evaluări
- Reciprocating Compressors Vibration AnalysisDocument3 paginiReciprocating Compressors Vibration Analysiskokoro48karaÎncă nu există evaluări
- CEP VFD ManualDocument234 paginiCEP VFD ManualUsama ZubairÎncă nu există evaluări
- Omni Trend Getting StartedDocument32 paginiOmni Trend Getting Startedtgrtrtqwreyt0% (1)
- Condition Based Maintenance of Pumps PDFDocument22 paginiCondition Based Maintenance of Pumps PDFumair saleemÎncă nu există evaluări
- CGL02 Blowers Report May 2009Document9 paginiCGL02 Blowers Report May 2009Hosam Abd Elkhalek100% (1)
- Gearbox: Cracked or Broken ToothDocument2 paginiGearbox: Cracked or Broken ToothHURRYSTARÎncă nu există evaluări
- Successful Solution: To The Challenge ofDocument2 paginiSuccessful Solution: To The Challenge ofKenny RuizÎncă nu există evaluări
- Development of An Online Diagnostic System Software For GGSSTPP Power Station RoparDocument18 paginiDevelopment of An Online Diagnostic System Software For GGSSTPP Power Station RoparH100% (1)
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisDe la EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisEvaluare: 4 din 5 stele4/5 (2)
- Mode Shapes of Centrifugal Pump Impeller PDFDocument4 paginiMode Shapes of Centrifugal Pump Impeller PDFhachanÎncă nu există evaluări
- Rotating Machinery Reliability for Technicians and EngineersDe la EverandRotating Machinery Reliability for Technicians and EngineersÎncă nu există evaluări
- High Order Large Eddy Simulation for Shock-Boundary Layer Interaction Control by a Micro-ramp Vortex GeneratorDe la EverandHigh Order Large Eddy Simulation for Shock-Boundary Layer Interaction Control by a Micro-ramp Vortex GeneratorÎncă nu există evaluări
- Vibration-based Condition Monitoring: Industrial, Aerospace and Automotive ApplicationsDe la EverandVibration-based Condition Monitoring: Industrial, Aerospace and Automotive ApplicationsÎncă nu există evaluări
- Predictive Maintenance Plan A Complete Guide - 2020 EditionDe la EverandPredictive Maintenance Plan A Complete Guide - 2020 EditionÎncă nu există evaluări
- Failure Reporting Analysis And Corrective Action System A Complete Guide - 2020 EditionDe la EverandFailure Reporting Analysis And Corrective Action System A Complete Guide - 2020 EditionÎncă nu există evaluări
- Why Industrial Bearings Fail: Analysis, Maintenance, and PreventionDe la EverandWhy Industrial Bearings Fail: Analysis, Maintenance, and PreventionÎncă nu există evaluări
- Rockewell Dynamix 1444-Um001 - En-P PDFDocument458 paginiRockewell Dynamix 1444-Um001 - En-P PDFronfrendÎncă nu există evaluări
- WWW - Eia.gov U.S. Department of Energy Washington, DC 20585: Independent Statistics & AnalysisDocument33 paginiWWW - Eia.gov U.S. Department of Energy Washington, DC 20585: Independent Statistics & AnalysisjaviÎncă nu există evaluări
- PDM Secrets Revealed 5th Edition Reader Feedback FOR EMAIL PDFDocument52 paginiPDM Secrets Revealed 5th Edition Reader Feedback FOR EMAIL PDFronfrendÎncă nu există evaluări
- Flux TechDocument2 paginiFlux TechRoslan SallehÎncă nu există evaluări
- Rockewell Dynamix 1444-Um001 - En-P PDFDocument458 paginiRockewell Dynamix 1444-Um001 - En-P PDFronfrendÎncă nu există evaluări
- EMT HVAC - 02A-r8-56-PschycrometryDocument28 paginiEMT HVAC - 02A-r8-56-PschycrometryronfrendÎncă nu există evaluări
- Proc V13Document2 paginiProc V13ronfrendÎncă nu există evaluări
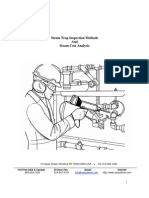
- Steam Trap Inspection Guide PDFDocument8 paginiSteam Trap Inspection Guide PDFchanayire100% (1)
- CHTC - Tairyuu PDFDocument9 paginiCHTC - Tairyuu PDFronfrendÎncă nu există evaluări
- Fluxtech PDFDocument2 paginiFluxtech PDFronfrendÎncă nu există evaluări
- Theory of UltrasoundDocument1 paginăTheory of UltrasoundronfrendÎncă nu există evaluări
- Hospital Heat Loss Analysis Report 5 Appendix 10Document3 paginiHospital Heat Loss Analysis Report 5 Appendix 10ronfrendÎncă nu există evaluări
- 3906 Qep Dec11Document88 pagini3906 Qep Dec11ronfrendÎncă nu există evaluări
- Load CellDocument1 paginăLoad CellronfrendÎncă nu există evaluări
- Rutina de Termografia - CarroceriasDocument2 paginiRutina de Termografia - CarroceriasronfrendÎncă nu există evaluări
- 3com 802 11b Wireless LansDocument14 pagini3com 802 11b Wireless LansUclidÎncă nu există evaluări
- Condition Based Maintenance OverviewDocument32 paginiCondition Based Maintenance OverviewronfrendÎncă nu există evaluări
- PROC - V19 PL302 DownloadDocument2 paginiPROC - V19 PL302 DownloadronfrendÎncă nu există evaluări
- Vibration Signature Analysis PROC - V18Document2 paginiVibration Signature Analysis PROC - V18ronfrendÎncă nu există evaluări
- Flux TechDocument2 paginiFlux TechRoslan SallehÎncă nu există evaluări
- Rutina de Termografia - CarroceriasDocument2 paginiRutina de Termografia - CarroceriasronfrendÎncă nu există evaluări
- Vibration Signature Analysis PROC - V18Document2 paginiVibration Signature Analysis PROC - V18ronfrendÎncă nu există evaluări
- 3906 Qep Dec11Document88 pagini3906 Qep Dec11ronfrendÎncă nu există evaluări
- PDM Secrets Revealed 5th Edition Reader Feedback FOR EMAIL PDFDocument52 paginiPDM Secrets Revealed 5th Edition Reader Feedback FOR EMAIL PDFronfrendÎncă nu există evaluări
- Vibration Signature Analysis PROC - V18Document2 paginiVibration Signature Analysis PROC - V18ronfrendÎncă nu există evaluări
- Estimating Convective Heat Transfer CoefficientsDocument9 paginiEstimating Convective Heat Transfer CoefficientsronfrendÎncă nu există evaluări
- Hospital Heat Loss Analysis Report 1 Appendix 6Document46 paginiHospital Heat Loss Analysis Report 1 Appendix 6ronfrendÎncă nu există evaluări
- Thermography LimitsDocument4 paginiThermography LimitsronfrendÎncă nu există evaluări
- 450 A Oil Analysis 450 A Oil Analysis: Iron Copper Iron CopperDocument1 pagină450 A Oil Analysis 450 A Oil Analysis: Iron Copper Iron CopperronfrendÎncă nu există evaluări
- Level 3 NVQ Refinery Ops Control Room NOSDocument42 paginiLevel 3 NVQ Refinery Ops Control Room NOSronfrendÎncă nu există evaluări
- Grant Miller Resume-ColliersDocument3 paginiGrant Miller Resume-ColliersDeven GriffinÎncă nu există evaluări
- Pa 28 151 161 - mmv1995 PDFDocument585 paginiPa 28 151 161 - mmv1995 PDFJonatan JonatanBernalÎncă nu există evaluări
- X606 PDFDocument1 paginăX606 PDFDany OrioliÎncă nu există evaluări
- UntitledDocument6 paginiUntitledCoky IrcanÎncă nu există evaluări
- Maverick Research: World Order 2.0: The Birth of Virtual NationsDocument9 paginiMaverick Research: World Order 2.0: The Birth of Virtual NationsСергей КолосовÎncă nu există evaluări
- Add New Question (Download - PHP? SC Mecon&id 50911)Document9 paginiAdd New Question (Download - PHP? SC Mecon&id 50911)AnbarasanÎncă nu există evaluări
- Order To Cash Cycle Group 1Document4 paginiOrder To Cash Cycle Group 1AswinAniÎncă nu există evaluări
- Digitalisasi Alquran-1 PDFDocument40 paginiDigitalisasi Alquran-1 PDFMohammad Zildan Pasyha MÎncă nu există evaluări
- History of Phosphoric Acid Technology (Evolution and Future Perspectives)Document7 paginiHistory of Phosphoric Acid Technology (Evolution and Future Perspectives)Fajar Zona67% (3)
- Hospital Management System DatabaseDocument18 paginiHospital Management System DatabasesamdhathriÎncă nu există evaluări
- Student Application Form BCIS - 2077Document2 paginiStudent Application Form BCIS - 2077Raaz Key Run ChhatkuliÎncă nu există evaluări
- Guide On Multiple RegressionDocument29 paginiGuide On Multiple RegressionLucyl MendozaÎncă nu există evaluări
- Payment Systems Worldwide: Appendix Country-by-Country AnswersDocument306 paginiPayment Systems Worldwide: Appendix Country-by-Country Answersravinewatia27Încă nu există evaluări
- PCU CalculationDocument2 paginiPCU CalculationMidhun Joseph0% (1)
- Chinaware - Zen PDFDocument111 paginiChinaware - Zen PDFMixo LogiÎncă nu există evaluări
- Project Cost ContingencyDocument9 paginiProject Cost ContingencyniroshniroshÎncă nu există evaluări
- ASTM A586-04aDocument6 paginiASTM A586-04aNadhiraÎncă nu există evaluări
- Efecto de Superdesintegrantes en La Disolución de Drogas CatiónicasDocument6 paginiEfecto de Superdesintegrantes en La Disolución de Drogas CatiónicascbcalderonÎncă nu există evaluări
- 1.reasons For VariationsDocument2 pagini1.reasons For Variationsscribd99190Încă nu există evaluări
- Top Ten Helicopter Checkride TipsDocument35 paginiTop Ten Helicopter Checkride TipsAbhiraj Singh SandhuÎncă nu există evaluări
- F9 Smart Study NotesDocument97 paginiF9 Smart Study NotesSteven Lino100% (5)
- You Wouldnt Want To Sail On A 19th-Century Whaling Ship 33 Grisly EnglishareDocument36 paginiYou Wouldnt Want To Sail On A 19th-Century Whaling Ship 33 Grisly EnglishareDušan MićovićÎncă nu există evaluări
- (Ambition) Malaysia 2023 Market Insights ReportDocument46 pagini(Ambition) Malaysia 2023 Market Insights ReportMaz Izman BudimanÎncă nu există evaluări
- Summative-Test-3-5 Tve ExploratoryDocument3 paginiSummative-Test-3-5 Tve ExploratoryMjnicole MartejaÎncă nu există evaluări
- Riba, Its Types and ImplicationsDocument37 paginiRiba, Its Types and Implicationsmahamamir012Încă nu există evaluări
- Airport Demand ModelDocument26 paginiAirport Demand ModelbsvseyÎncă nu există evaluări
- Unit 8 - Week 7: Assignment 7Document3 paginiUnit 8 - Week 7: Assignment 7Nitin MoreÎncă nu există evaluări
- Autoclave 2Document52 paginiAutoclave 2SILVANA ELIZABETH ROMO ALBUJAÎncă nu există evaluări
- 4 FAR EAST BANK & TRUST COMPANY V DIAZ REALTY INCDocument3 pagini4 FAR EAST BANK & TRUST COMPANY V DIAZ REALTY INCDanielleÎncă nu există evaluări
- Longley Rice PropagationDocument11 paginiLongley Rice Propagationy_m_algbaliÎncă nu există evaluări