S-ar putea să vă placă și
- Motor AccelerationDocument41 paginiMotor AccelerationFrancisco Andrade100% (1)
- Transient StabilityDocument26 paginiTransient StabilitySarojakanti SahooÎncă nu există evaluări
- Power System Stability StudiesDocument143 paginiPower System Stability StudiesOussama Aatiq100% (1)
- Project PowerdistributionDocument10 paginiProject Powerdistributionchilamkurti_sivasankararaoÎncă nu există evaluări
- Power System ModelingDocument27 paginiPower System ModelingFrancisco AndradeÎncă nu există evaluări
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDe la EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsÎncă nu există evaluări
- Reactive Power Compensation StudyDocument82 paginiReactive Power Compensation StudySaravanan NatarajanÎncă nu există evaluări
- ETAP Workshop Notes Harmonic Analysis: Theoretical ConceptsDocument21 paginiETAP Workshop Notes Harmonic Analysis: Theoretical ConceptshussainÎncă nu există evaluări
- IDH Motor Starting CalDocument5 paginiIDH Motor Starting CalJacob PhilipÎncă nu există evaluări
- Procedure For AnalysisDocument22 paginiProcedure For AnalysisOmodibo Oghenekevwe KevinÎncă nu există evaluări
- Power System Studies - AbstractDocument5 paginiPower System Studies - AbstractK.RamachandranÎncă nu există evaluări
- Hep 61024 ETAP Study ReportDocument11 paginiHep 61024 ETAP Study ReportDipak VaghelaÎncă nu există evaluări
- Harmonic Analysis: © 2015 ETAPDocument37 paginiHarmonic Analysis: © 2015 ETAPFrancisco AndradeÎncă nu există evaluări
- Chapter 8 ETAP ExampleDocument11 paginiChapter 8 ETAP ExampleSankara Rao Bonala100% (2)
- Report08072020 PDFDocument124 paginiReport08072020 PDFramesh cuppu100% (1)
- Nerator Transients PDFDocument24 paginiNerator Transients PDFhussainÎncă nu există evaluări
- PSCAD Course NotesDocument72 paginiPSCAD Course NotesPacha Mami100% (1)
- Transformer Sizing Using ETAP PDFDocument24 paginiTransformer Sizing Using ETAP PDFalexiuteodor100% (2)
- 09 - Motor AccelerationDocument40 pagini09 - Motor Accelerationchanchai T100% (5)
- Substation Desing Training SyllabusDocument7 paginiSubstation Desing Training SyllabusRehan SheikhÎncă nu există evaluări
- Etap FinalDocument27 paginiEtap FinalJaya Rajesh Raaj100% (1)
- Etap Tip 010Document9 paginiEtap Tip 010Michael Calizo PacisÎncă nu există evaluări
- ETAP 114 Power System Analysis Workshop, TBD, United Kingdom - ETAPDocument7 paginiETAP 114 Power System Analysis Workshop, TBD, United Kingdom - ETAPOoi Ban Juan0% (1)
- Transformer SizingDocument19 paginiTransformer Sizingjokanov0% (1)
- Power Engineering Training CourseDocument254 paginiPower Engineering Training Courseme_chÎncă nu există evaluări
- Fast Bus Changeover PDFDocument8 paginiFast Bus Changeover PDFhussainÎncă nu există evaluări
- Motor Starting Study Exercise ETAPDocument5 paginiMotor Starting Study Exercise ETAPFebriyanto Saja0% (1)
- TS Case 1 - Stability On A One-Unit-to-Grid System: DescriptionDocument3 paginiTS Case 1 - Stability On A One-Unit-to-Grid System: DescriptionFrancisco AndradeÎncă nu există evaluări
- Motor para Estimation&Tuning - With Optimization PDFDocument13 paginiMotor para Estimation&Tuning - With Optimization PDFhussainÎncă nu există evaluări
- Pscad ModelingDocument21 paginiPscad ModelingSumith Wellawa100% (1)
- MHS E000 El CC 107 05Document24 paginiMHS E000 El CC 107 05sivasan10006098Încă nu există evaluări
- Etap Tip 008Document6 paginiEtap Tip 008yetignr0% (1)
- Slow Bus ChangeoverDocument7 paginiSlow Bus ChangeoverPandiyan100% (1)
- 05 Transient Angle StabilityDocument109 pagini05 Transient Angle StabilitysulemankhalidÎncă nu există evaluări
- Power System Studies of Cement PlantDocument12 paginiPower System Studies of Cement PlantJameel Benavidez100% (1)
- PCPL-1409-4-300 R0 Short Circuit ReportDocument32 paginiPCPL-1409-4-300 R0 Short Circuit ReportMuthuvel GaneshÎncă nu există evaluări
- Load Flow Analysis and Short CircuitDocument16 paginiLoad Flow Analysis and Short CircuitAkram HossenÎncă nu există evaluări
- Pscad ExamplesDocument9 paginiPscad ExamplesSumith Wellawa100% (1)
- System StabilityDocument32 paginiSystem Stabilityelectron teslaÎncă nu există evaluări
- Power Flow StudyDocument71 paginiPower Flow StudynumansaeedpkÎncă nu există evaluări
- Power System Analysis NotesDocument186 paginiPower System Analysis Notesshishir jhaÎncă nu există evaluări
- 10 Insulation Co-OrdinationDocument18 pagini10 Insulation Co-Ordinationdaegerte100% (3)
- Load FlowDocument93 paginiLoad FlowgovindarulÎncă nu există evaluări
- APFC Panel DesigningDocument16 paginiAPFC Panel Designingyrmn200% (1)
- Uhp SCT E00 XJ C 0001 x0 Calculation For BedgDocument116 paginiUhp SCT E00 XJ C 0001 x0 Calculation For Bedgwaqqar shaikhÎncă nu există evaluări
- SM10 E0 CA 1109 03 Relay CoordinationDocument536 paginiSM10 E0 CA 1109 03 Relay CoordinationAsif SajwaniÎncă nu există evaluări
- Report On Relay Co-Ordination Study Prep PDFDocument769 paginiReport On Relay Co-Ordination Study Prep PDFSonu Desai100% (2)
- PSCAD Course Notes 01Document72 paginiPSCAD Course Notes 01pcumaxÎncă nu există evaluări
- Etap Tip 007Document6 paginiEtap Tip 007moentaseerÎncă nu există evaluări
- VOLUME 1 - General Notes On Transient Stability & Control - FinalDocument253 paginiVOLUME 1 - General Notes On Transient Stability & Control - FinalOoi Ban JuanÎncă nu există evaluări
- Unit V 1. Define Matrix Converter and Mention It Application. Matrix Converter ConceptDocument5 paginiUnit V 1. Define Matrix Converter and Mention It Application. Matrix Converter Conceptsambu112Încă nu există evaluări
- Transient Stability Analysis For 6 Bus System Using E-TapDocument10 paginiTransient Stability Analysis For 6 Bus System Using E-TapSaran KuttyÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetÎncă nu există evaluări
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDe la EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetEvaluare: 2 din 5 stele2/5 (1)
- Distribution System ModelsDocument21 paginiDistribution System Modelsrobert1234567m100% (1)
- Thyristor Controlled Series Capacitor FAIR COPY 1234Document66 paginiThyristor Controlled Series Capacitor FAIR COPY 1234senthil_k23Încă nu există evaluări
- ETAP Case StudyDocument4 paginiETAP Case Studymithun46Încă nu există evaluări
- What Is Facts?Document36 paginiWhat Is Facts?TahirAbbasÎncă nu există evaluări
- 03 Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsDocument63 pagini03 Definition - Classification of Power System Stability IEEE-CIGRE Joint Task Force On Stability Terms and DefinitionsRosa Elvira Montalvo MartínezÎncă nu există evaluări
- Lecture 18 System StabilityDocument33 paginiLecture 18 System StabilityTEMIDAYOÎncă nu există evaluări
- Chapter 1 IntroductionDocument49 paginiChapter 1 IntroductionGemex4fshÎncă nu există evaluări
- Wavetek Portable RF Power Meter Model 1034A (1499-14166) Operating and Maintenance Manual, 1966.Document64 paginiWavetek Portable RF Power Meter Model 1034A (1499-14166) Operating and Maintenance Manual, 1966.Bob Laughlin, KWØRLÎncă nu există evaluări
- Famous MathematicianDocument116 paginiFamous MathematicianAngelyn MontibolaÎncă nu există evaluări
- Pneumatic Conveying of Bulk Solids PDFDocument231 paginiPneumatic Conveying of Bulk Solids PDFCarloLopez100% (2)
- GTG - TFA Belt DrivenDocument2 paginiGTG - TFA Belt Drivensuan170Încă nu există evaluări
- Activating The Standard BI ReportDocument17 paginiActivating The Standard BI ReportlearnsapbwÎncă nu există evaluări
- ITECH1000 Assignment1 Specification Sem22014Document6 paginiITECH1000 Assignment1 Specification Sem22014Nitin KumarÎncă nu există evaluări
- Index Terms LinksDocument31 paginiIndex Terms Linksdeeptiwagle5649Încă nu există evaluări
- Mech LND 17.0 M06 Response Spectrum AnalysisDocument64 paginiMech LND 17.0 M06 Response Spectrum AnalysisKubilayÎncă nu există evaluări
- CH 1 Optical Fiber Introduction - 2Document18 paginiCH 1 Optical Fiber Introduction - 2Krishna Prasad PheluÎncă nu există evaluări
- Question IARDocument4 paginiQuestion IARAryan jay vermaÎncă nu există evaluări
- Lecture-7 - Line CodingDocument14 paginiLecture-7 - Line CodingFahim Hasan AlifÎncă nu există evaluări
- Hitachi HDDs Repair Scheme Based On MRT ProDocument21 paginiHitachi HDDs Repair Scheme Based On MRT ProvicvpÎncă nu există evaluări
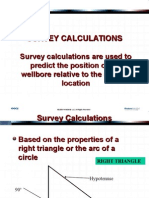
- 02 Survey Calculations - PpsDocument96 pagini02 Survey Calculations - PpsLeo Ivan Aviles RicaldiÎncă nu există evaluări
- Polya Problem Solving StrategiesDocument12 paginiPolya Problem Solving StrategiesGwandaleana VwearsosaÎncă nu există evaluări
- 10 2Document26 pagini10 2cristinatubleÎncă nu există evaluări
- Unit-3 BPDocument48 paginiUnit-3 BPShreyas ShreyuÎncă nu există evaluări
- Pioneer Car Stereo System DVH-735AVDocument85 paginiPioneer Car Stereo System DVH-735AVJs LópezÎncă nu există evaluări
- Solutionbank D1: Edexcel AS and A Level Modular MathematicsDocument30 paginiSolutionbank D1: Edexcel AS and A Level Modular MathematicsMaruf_007Încă nu există evaluări
- PPF CalculatorDocument2 paginiPPF CalculatorshashanamouliÎncă nu există evaluări
- X-Plane Mobile ManualDocument66 paginiX-Plane Mobile ManualRafael MunizÎncă nu există evaluări
- BSIT Nov Dec 2012 2nd CycleDocument59 paginiBSIT Nov Dec 2012 2nd CyclePiyush PriyankÎncă nu există evaluări
- (Complete) Electrolysis of Copper SulphateDocument4 pagini(Complete) Electrolysis of Copper SulphateNoooooÎncă nu există evaluări
- Chap005 3Document26 paginiChap005 3Anass BÎncă nu există evaluări
- Various Image Enhancement Techniques-A Critical Review: S.S. Bedi, Rati KhandelwalDocument5 paginiVarious Image Enhancement Techniques-A Critical Review: S.S. Bedi, Rati KhandelwalArina AndriesÎncă nu există evaluări
- 3x Exemplar 2017 en PDFDocument4 pagini3x Exemplar 2017 en PDFgudzalovÎncă nu există evaluări
- Chord Tone Improvisation Part IDocument38 paginiChord Tone Improvisation Part I2018 01097Încă nu există evaluări
- VT300 User ManualDocument21 paginiVT300 User ManualLuvÎncă nu există evaluări
- Ss e (Bocr) ManualDocument2 paginiSs e (Bocr) ManualNaveen GuptaÎncă nu există evaluări
- VFS1000 6000Document126 paginiVFS1000 6000krisornÎncă nu există evaluări