S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Mperc Net Metering Regulations-Wip-28.10.2021Document32 paginiMperc Net Metering Regulations-Wip-28.10.2021Sandeep Guha NiyogiÎncă nu există evaluări
- Bplan Photography BusinessDocument28 paginiBplan Photography BusinessSandeep Guha Niyogi100% (1)
- Competitive Analysis and Corporate Strategy - BCGDocument32 paginiCompetitive Analysis and Corporate Strategy - BCGSandeep Guha NiyogiÎncă nu există evaluări
- POLICIES ON SOLAR POWERDocument16 paginiPOLICIES ON SOLAR POWERSandeep Guha NiyogiÎncă nu există evaluări
- Open Access Literature ReviewDocument24 paginiOpen Access Literature ReviewSandeep Guha NiyogiÎncă nu există evaluări
- 220v Ac To 12vdc Rectifier CircuitDocument10 pagini220v Ac To 12vdc Rectifier CircuitSandeep Guha NiyogiÎncă nu există evaluări
- For The State of Andhra Pradesh - Sample AnalysisDocument6 paginiFor The State of Andhra Pradesh - Sample AnalysisSandeep Guha NiyogiÎncă nu există evaluări
- CBT PPT ECommerceDocument31 paginiCBT PPT ECommerceSandeep Guha NiyogiÎncă nu există evaluări
- CBT PPT ECommerceDocument31 paginiCBT PPT ECommerceSandeep Guha NiyogiÎncă nu există evaluări
- Competitive Analysis and Corporate Strategy - BCGDocument32 paginiCompetitive Analysis and Corporate Strategy - BCGSandeep Guha Niyogi100% (2)
- BCG Concept of Competitive Analysis & Corporate StrategyDocument27 paginiBCG Concept of Competitive Analysis & Corporate StrategySandeep Guha Niyogi100% (1)
- SWOT Analysis of E.onDocument6 paginiSWOT Analysis of E.onSandeep Guha NiyogiÎncă nu există evaluări
- Quantitative AbilityDocument1 paginăQuantitative AbilitySandeep Guha NiyogiÎncă nu există evaluări
- Power SectorDocument20 paginiPower SectorSandeep Guha NiyogiÎncă nu există evaluări
- Questions Field TheoryDocument1 paginăQuestions Field TheorySandeep Guha NiyogiÎncă nu există evaluări
- Power System Gate MockDocument1 paginăPower System Gate MockSandeep Guha NiyogiÎncă nu există evaluări
- 3 Sample KVL KCL and Power Problems SoluDocument4 pagini3 Sample KVL KCL and Power Problems SoluSuhail KhanÎncă nu există evaluări
- Why do I need a solar regulatorDocument2 paginiWhy do I need a solar regulatorSandeep Guha NiyogiÎncă nu există evaluări
- HV Test TransformersDocument4 paginiHV Test TransformersSandeep Guha NiyogiÎncă nu există evaluări
- Question Bank in EeDocument1 paginăQuestion Bank in EeSandeep Guha NiyogiÎncă nu există evaluări
- Capacitance: Figure 8-177Document8 paginiCapacitance: Figure 8-177Sandeep Guha NiyogiÎncă nu există evaluări
- 6.0A Silicon Rectifier: RRM RMS DC A (AV)Document2 pagini6.0A Silicon Rectifier: RRM RMS DC A (AV)Sandeep Guha NiyogiÎncă nu există evaluări
- Mock GateDocument11 paginiMock GateSandeep Guha NiyogiÎncă nu există evaluări
- Details On Speed ControlDocument2 paginiDetails On Speed ControlSandeep Guha NiyogiÎncă nu există evaluări
- Question Bank in EeDocument1 paginăQuestion Bank in EeSandeep Guha NiyogiÎncă nu există evaluări
- 07a1ec07 Basic Electrical EngineeringDocument8 pagini07a1ec07 Basic Electrical EngineeringSRINIVASA RAO GANTAÎncă nu există evaluări
- Waveform Converter Design GuideDocument1 paginăWaveform Converter Design GuideSandeep Guha NiyogiÎncă nu există evaluări
- Matlab PDFDocument1 paginăMatlab PDFSandeep Guha NiyogiÎncă nu există evaluări
- Controlled RectiersDocument16 paginiControlled RectiersSandeep Guha NiyogiÎncă nu există evaluări
- Electrical Engineering Syllabus Revised Upto 8th Semester 2007Document52 paginiElectrical Engineering Syllabus Revised Upto 8th Semester 2007sups149Încă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 500 MW Generator's Brushless Excitation and Hydrogen CoolingDocument11 pagini500 MW Generator's Brushless Excitation and Hydrogen CoolingAhemadÎncă nu există evaluări
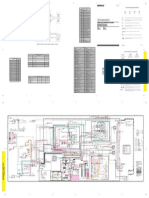
- Electric 120H 5FM PDFDocument2 paginiElectric 120H 5FM PDFrprim100% (2)
- Shure fp42Document20 paginiShure fp42Denis ZhuravelÎncă nu există evaluări
- Regulation - 2010: K.S.Rangasamy College of Technology, Tiruchengode - 637 215Document3 paginiRegulation - 2010: K.S.Rangasamy College of Technology, Tiruchengode - 637 215Latta SakthyyÎncă nu există evaluări
- TL494 PDFDocument33 paginiTL494 PDFHelal ShamesÎncă nu există evaluări
- Seminar, Workshop, ConferenceDocument30 paginiSeminar, Workshop, ConferenceMutharasu SÎncă nu există evaluări
- Primary Lithium Battery: 3.6 V Primary Lithium-Thionyl Chloride (Li-Socl) High Energy Density Aa-Size Bobbin CellDocument2 paginiPrimary Lithium Battery: 3.6 V Primary Lithium-Thionyl Chloride (Li-Socl) High Energy Density Aa-Size Bobbin CelledgarÎncă nu există evaluări
- LP For SCIENCE 5Document9 paginiLP For SCIENCE 5DARYL SATURNO CORRALÎncă nu există evaluări
- HVX 12-17.5-24kV User GuideDocument48 paginiHVX 12-17.5-24kV User Guidestunnchuck100% (1)
- Failure of Transformer InsulationDocument9 paginiFailure of Transformer InsulationSachin RaiÎncă nu există evaluări
- Revised GCSE SCI Double Award Unitised REVISED Past Papers Mark Schemes Standard MayJune Series 2019 29210 2Document20 paginiRevised GCSE SCI Double Award Unitised REVISED Past Papers Mark Schemes Standard MayJune Series 2019 29210 2bernardmcelholmÎncă nu există evaluări
- T.D.A 1560 PDFDocument16 paginiT.D.A 1560 PDFJose M PeresÎncă nu există evaluări
- Stick Diagrams: Learn How to Draw Circuit LayoutsDocument19 paginiStick Diagrams: Learn How to Draw Circuit Layoutsarthy_mariappan3873Încă nu există evaluări
- Manual Gerador PWM XY-PWM1Document5 paginiManual Gerador PWM XY-PWM1Elias Calçados100% (2)
- 1. 3Φ TransformersDocument220 pagini1. 3Φ TransformersKyambi MutiaÎncă nu există evaluări
- Frenic-Ehvac (F2e) User - S ManualDocument631 paginiFrenic-Ehvac (F2e) User - S ManualkarunÎncă nu există evaluări
- JBL Manual - Northridge E150PDocument8 paginiJBL Manual - Northridge E150PionelflorinelÎncă nu există evaluări
- 55 - B - 5 - Physics For VI CandidatesDocument27 pagini55 - B - 5 - Physics For VI CandidatesOm TripathiÎncă nu există evaluări
- Tle Techdraft10 Q3 M16Document12 paginiTle Techdraft10 Q3 M16Rye San100% (1)
- LG+47ln5700 47ln570t 47ln570y 47ln5710 Chassis lb33bDocument119 paginiLG+47ln5700 47ln570t 47ln570y 47ln5710 Chassis lb33bmidominguez0% (1)
- Philips Fwc220Document28 paginiPhilips Fwc220Ionel RusÎncă nu există evaluări
- Black Decker bcblv3625l1 QWDocument112 paginiBlack Decker bcblv3625l1 QWАлина ВладиславовнаÎncă nu există evaluări
- Electric Drives and Control LabDocument6 paginiElectric Drives and Control LabParul ChandnaÎncă nu există evaluări
- Ag E4412A OperGuide enDocument47 paginiAg E4412A OperGuide enPixel ShicÎncă nu există evaluări
- Bravo: He Small Pump Package With Big FeaturesDocument5 paginiBravo: He Small Pump Package With Big Featuresvibin globalÎncă nu există evaluări
- Distribution and Substation: TransformersDocument72 paginiDistribution and Substation: Transformersheatra2222Încă nu există evaluări
- Sony dsr-pdx10 Ver-1.8 SMDocument526 paginiSony dsr-pdx10 Ver-1.8 SMSaulvcr64 PorleyÎncă nu există evaluări
- Sw4548e PDFDocument152 paginiSw4548e PDFGA16DET100% (1)
- IEC 60601-1 Medical Design Standards - 3rd EditionDocument7 paginiIEC 60601-1 Medical Design Standards - 3rd Editionacm573100% (1)
- IC A110 BrochureDocument2 paginiIC A110 BrochureChrome PicassoÎncă nu există evaluări