S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Theory Notes of Newton's Laws of Motion For NEET & IIT 2017Document18 paginiTheory Notes of Newton's Laws of Motion For NEET & IIT 2017umved singh yadav90% (10)
- Lab Activity 8 and 9 Class IxDocument4 paginiLab Activity 8 and 9 Class IxSiddhant NarayanÎncă nu există evaluări
- Influence of Organizational Culture and Compensation On Employee Performance With Motivation Work As A Mediation Variable at Pt. Jasaraharja Branch RiauDocument8 paginiInfluence of Organizational Culture and Compensation On Employee Performance With Motivation Work As A Mediation Variable at Pt. Jasaraharja Branch RiauInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Notes On Algbra G ChrystalDocument31 paginiNotes On Algbra G ChrystalstreetbaÎncă nu există evaluări
- Control System EngineeringDocument3 paginiControl System Engineeringnisarg0% (1)
- C Sample Two Mark Question and Answer: 1) Who Invented C Language?Document13 paginiC Sample Two Mark Question and Answer: 1) Who Invented C Language?rajapst91% (11)
- Pub Quantum-Physics PDFDocument338 paginiPub Quantum-Physics PDFRaj JanaÎncă nu există evaluări
- 2139 12021 1 PB PDFDocument9 pagini2139 12021 1 PB PDFSantosh Kumar PandeyÎncă nu există evaluări
- DT Q A DX DT Q KA DX: OverallDocument193 paginiDT Q A DX DT Q KA DX: OverallHARI B SÎncă nu există evaluări
- AP Stats Reference SheetDocument7 paginiAP Stats Reference SheetRamenKing12Încă nu există evaluări
- Report-Motion in 1d-Part IIDocument10 paginiReport-Motion in 1d-Part IIAlper SaglamÎncă nu există evaluări
- MECH60561 2022 23 Pressure Vessel ExerciseDocument3 paginiMECH60561 2022 23 Pressure Vessel ExerciseAli JabranÎncă nu există evaluări
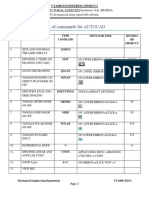
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 paginiList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelÎncă nu există evaluări
- Chapter 3 (Laplace Transform)Document14 paginiChapter 3 (Laplace Transform)EmmanuelÎncă nu există evaluări
- PEMDAS With FractionsDocument2 paginiPEMDAS With FractionsMathnasium of BentonvilleÎncă nu există evaluări
- ME - R19 - 170 PagesDocument170 paginiME - R19 - 170 PagesKanchiSrinivasÎncă nu există evaluări
- JEXPO MathsDocument6 paginiJEXPO MathsAvijit Das.Încă nu există evaluări
- Quality Control and Analysis: Ujvnl Ae 2016Document7 paginiQuality Control and Analysis: Ujvnl Ae 2016Sagar ThengilÎncă nu există evaluări
- Sample 5th Grade Lesson PlanDocument2 paginiSample 5th Grade Lesson PlanJune Lee CamarinÎncă nu există evaluări
- Diagnostics of Subsynchronous Vibrations in Rotating Machinery - Methodologies To Identify Potential InstabilityDocument99 paginiDiagnostics of Subsynchronous Vibrations in Rotating Machinery - Methodologies To Identify Potential InstabilityMuhammad afzalÎncă nu există evaluări
- 01otr 02ourDocument53 pagini01otr 02ourKeerthana KÎncă nu există evaluări
- Solved Problems - Continuous Random VariablesDocument4 paginiSolved Problems - Continuous Random VariablesDahanyakage WickramathungaÎncă nu există evaluări
- Deterministic Phase Retrieval: A Green's Function SolutionDocument8 paginiDeterministic Phase Retrieval: A Green's Function Solutionlednakashim100% (1)
- Frequency Distribution Table GraphDocument10 paginiFrequency Distribution Table GraphHannah ArañaÎncă nu există evaluări
- House Price Estimates Based On Machine Learning AlgorithmDocument5 paginiHouse Price Estimates Based On Machine Learning AlgorithmEditor IJTSRDÎncă nu există evaluări
- XYZ Data Analysis ReportDocument14 paginiXYZ Data Analysis ReportAshwini Kumar Maurya100% (1)
- Project in Algebra 3rd Grading ProblemsDocument77 paginiProject in Algebra 3rd Grading Problemsazisah azisÎncă nu există evaluări
- Second Order Hold Based Discretization Method ofDocument5 paginiSecond Order Hold Based Discretization Method ofvitinrjÎncă nu există evaluări
- L As Level Physics A 2821 01 January 2008 Question Paper Old g481Document16 paginiL As Level Physics A 2821 01 January 2008 Question Paper Old g481dasha962Încă nu există evaluări