S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Alimentacion Baterias TiposDocument11 paginiAlimentacion Baterias TiposjulioclavijoÎncă nu există evaluări
- U-Joint Shaft PDFDocument5 paginiU-Joint Shaft PDFAdrian SantosÎncă nu există evaluări
- Ict Designation FormDocument3 paginiIct Designation FormAloha Mae ImbagÎncă nu există evaluări
- Chapter 7 Series Parallel CircuitsDocument70 paginiChapter 7 Series Parallel CircuitsAbdullrahman Al-ShammaaÎncă nu există evaluări
- INDUSTRIAL LUBRICANTS-misr Petroleum PDFDocument17 paginiINDUSTRIAL LUBRICANTS-misr Petroleum PDFIslam FawzyÎncă nu există evaluări
- Current Fault Codes: Code Text StatusDocument39 paginiCurrent Fault Codes: Code Text StatusNovakurniawanÎncă nu există evaluări
- View/Update Profile Apply For STC: Upload Sponsorship STC Applied Download Certificate Change PasswordDocument2 paginiView/Update Profile Apply For STC: Upload Sponsorship STC Applied Download Certificate Change PasswordlakshmilavanyaÎncă nu există evaluări
- Inv INDIGO 22.11.2021 + TRDocument1 paginăInv INDIGO 22.11.2021 + TRJunis MamedovÎncă nu există evaluări
- CMR900Document6 paginiCMR900Time To Use BrainÎncă nu există evaluări
- Article 17 Ijaet Volii Issue IV Oct Dec 2011Document10 paginiArticle 17 Ijaet Volii Issue IV Oct Dec 2011Mustapha Maiz Hadj AhmedÎncă nu există evaluări
- Assessment of Reinforcement CorrosionDocument5 paginiAssessment of Reinforcement CorrosionClethHirenÎncă nu există evaluări
- ES1022 y Midterm December 2013 With Final AnswersDocument13 paginiES1022 y Midterm December 2013 With Final AnswersGASR2017Încă nu există evaluări
- DELTA - IA-HMI - Danfoss VLT 2800 - FC Protocol - CM - EN - 20111122Document4 paginiDELTA - IA-HMI - Danfoss VLT 2800 - FC Protocol - CM - EN - 20111122Ronnie Ayala SandovalÎncă nu există evaluări
- Group 2 (Oacc39)Document3 paginiGroup 2 (Oacc39)viernazanne.viadoÎncă nu există evaluări
- How To Create A Virtual Networks by Using Vmware WorkstationDocument15 paginiHow To Create A Virtual Networks by Using Vmware WorkstationAsad EjazÎncă nu există evaluări
- UntitledDocument32 paginiUntitledAnimeFreak930901Încă nu există evaluări
- λ-based Design Rules PDFDocument3 paginiλ-based Design Rules PDFvinosujaÎncă nu există evaluări
- Presentation On Market Potential of Tag TasteDocument10 paginiPresentation On Market Potential of Tag TasteRajaÎncă nu există evaluări
- Nessus 6.3 Installation GuideDocument109 paginiNessus 6.3 Installation GuideminardmiÎncă nu există evaluări
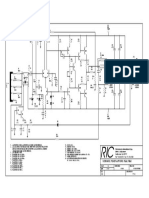
- Ric RG90 y RG60Document1 paginăRic RG90 y RG60GabrielConsentidoÎncă nu există evaluări
- Broaching PrsDocument41 paginiBroaching PrsParag PatelÎncă nu există evaluări
- Estimation and Costing by M Chakraborty PDFDocument4 paginiEstimation and Costing by M Chakraborty PDFAakash Kamthane0% (3)
- Bill of Materials SampleDocument31 paginiBill of Materials SampleOcsi YeahÎncă nu există evaluări
- Surge Arresters PP 7Document9 paginiSurge Arresters PP 7gabriela69sÎncă nu există evaluări
- HMA Road Design NotesDocument86 paginiHMA Road Design NotesFarooq AhmadÎncă nu există evaluări
- Broch 6700 New 1Document2 paginiBroch 6700 New 1rumboherbalÎncă nu există evaluări
- Building 101 - 25 Tips For A Tropical HomeDocument11 paginiBuilding 101 - 25 Tips For A Tropical HomeMelanie CabforoÎncă nu există evaluări
- Gudenaaparken (Randers) - All You Need To Know BEFORE You GoDocument8 paginiGudenaaparken (Randers) - All You Need To Know BEFORE You GoElaine Zarb GiorgioÎncă nu există evaluări
- IEC 60364-1 Electrical Installations in Buildings PDFDocument80 paginiIEC 60364-1 Electrical Installations in Buildings PDFMarin PopescuÎncă nu există evaluări
- InternshipDocument14 paginiInternshipMohammed Shaheeruddin0% (1)