S-ar putea să vă placă și
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesDe la EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesÎncă nu există evaluări
- Embedded Operating Systems For Real-Time Applications: AbstractDocument14 paginiEmbedded Operating Systems For Real-Time Applications: AbstractKunal KucheriaÎncă nu există evaluări
- Operating SystemDocument9 paginiOperating SystemAnujÎncă nu există evaluări
- Erts Unit IIIDocument30 paginiErts Unit IIIsenthilkumarÎncă nu există evaluări
- Types of Operating SystemsDocument7 paginiTypes of Operating Systemspritika86Încă nu există evaluări
- VivaDocument40 paginiVivaShruthi JalalpuramÎncă nu există evaluări
- BY Arun Kumar D: 1MV06MCA07Document18 paginiBY Arun Kumar D: 1MV06MCA07crazyladduÎncă nu există evaluări
- Chapter 6 Case StudiesDocument12 paginiChapter 6 Case StudiesXyzÎncă nu există evaluări
- Operating System Unit 1Document29 paginiOperating System Unit 1HECHOS TALKÎncă nu există evaluări
- Aos VivaDocument14 paginiAos VivaChaithanya DamerlaÎncă nu există evaluări
- Operating Systems Interview QuestionsDocument15 paginiOperating Systems Interview QuestionsSudarshan BÎncă nu există evaluări
- 5 PDFDocument23 pagini5 PDFjeeturathiaÎncă nu există evaluări
- Embedded Systems Today 33333Document14 paginiEmbedded Systems Today 33333ogbunelson2Încă nu există evaluări
- Notes OscdDocument145 paginiNotes OscdSharma SudhirÎncă nu există evaluări
- Unit-1 Feature Point of View Types of OsDocument5 paginiUnit-1 Feature Point of View Types of OsReshmaÎncă nu există evaluări
- RTOS - RT Linux Porting On S3Cmini2440 ARM9 Board: Ravindra Prasad Bonthu and Subrahmanyam Venkata VeeraghantaDocument4 paginiRTOS - RT Linux Porting On S3Cmini2440 ARM9 Board: Ravindra Prasad Bonthu and Subrahmanyam Venkata VeeraghantaIJERDÎncă nu există evaluări
- All ESSDocument97 paginiAll ESSmohammedminer20Încă nu există evaluări
- 300+ TOP Operating System LAB VIVA Questions and AnswersDocument33 pagini300+ TOP Operating System LAB VIVA Questions and AnswersRISHIÎncă nu există evaluări
- Operating Systems: Lecture OnDocument40 paginiOperating Systems: Lecture OnVishnu DuraiÎncă nu există evaluări
- Mrs. Hazel B. France Mrs. Hazel B. France IT Department IT DepartmentDocument75 paginiMrs. Hazel B. France Mrs. Hazel B. France IT Department IT DepartmentHazel Mjkristell Basallote FranceÎncă nu există evaluări
- Operating SystemDocument81 paginiOperating SystemShabbir AhmadÎncă nu există evaluări
- TP Embedded OS CH1Document12 paginiTP Embedded OS CH1SOLTANI MehdiÎncă nu există evaluări
- Os FaqDocument14 paginiOs Faqd_dharaÎncă nu există evaluări
- Embedded System UNIT 1st Notes-1Document10 paginiEmbedded System UNIT 1st Notes-1My HackÎncă nu există evaluări
- Operating Systems Interview QuestionsDocument15 paginiOperating Systems Interview QuestionsSachin NayeeÎncă nu există evaluări
- What Is An Embedded System?: Laser PrinterDocument9 paginiWhat Is An Embedded System?: Laser PrinterKajalÎncă nu există evaluări
- MANAOG Assignment 1Document4 paginiMANAOG Assignment 1IDate DanielÎncă nu există evaluări
- How Operating System WorksDocument21 paginiHow Operating System WorksJeffrey Abadesa EsmundoÎncă nu există evaluări
- Comp Application 1 SampleDocument21 paginiComp Application 1 Samplelolmingani saipanyuÎncă nu există evaluări
- Operating SystemDocument10 paginiOperating SystemGurpreetÎncă nu există evaluări
- Operating Systems (CA232)Document12 paginiOperating Systems (CA232)pravisingam86Încă nu există evaluări
- Operating SystemDocument15 paginiOperating SystemBonventure KipkiruiÎncă nu există evaluări
- How Operating Systems WorkDocument52 paginiHow Operating Systems WorksaconnectsÎncă nu există evaluări
- How Operating Systems WorkDocument2 paginiHow Operating Systems WorkManuel Panotes ReantazoÎncă nu există evaluări
- QBDocument121 paginiQBSarath PathariÎncă nu există evaluări
- How Operating Systems WorkDocument2 paginiHow Operating Systems WorkPj SalayonÎncă nu există evaluări
- Operating System NotesDocument23 paginiOperating System Notessra881010Încă nu există evaluări
- Diff Types of OsDocument3 paginiDiff Types of OsCSC LCBÎncă nu există evaluări
- How43 Operating Systems WorkDocument4 paginiHow43 Operating Systems WorkozzneÎncă nu există evaluări
- Introductory Concepts and CPU Scheduling: What Is Operating System ?Document70 paginiIntroductory Concepts and CPU Scheduling: What Is Operating System ?Devika DakhoreÎncă nu există evaluări
- Embedded Systems: Pankaj UpadhyayDocument20 paginiEmbedded Systems: Pankaj UpadhyayAhmed SaidÎncă nu există evaluări
- OSA NotesDocument23 paginiOSA NotesSANMATIÎncă nu există evaluări
- CPT111Mod 2 Unit 2 Introduction To Operation SystemsDocument7 paginiCPT111Mod 2 Unit 2 Introduction To Operation SystemsRoland FilibusÎncă nu există evaluări
- Rtos BookDocument96 paginiRtos BookGautam KumarÎncă nu există evaluări
- Lec1 Operating SystemDocument33 paginiLec1 Operating SystemMirna AttallahÎncă nu există evaluări
- How Operating Systems WorkDocument13 paginiHow Operating Systems WorkVinadagu VishayaaluÎncă nu există evaluări
- 02 Types of Operating SystemDocument8 pagini02 Types of Operating SystemZeshan AmirÎncă nu există evaluări
- Two Marks Questions With Answers Embedded SystemDocument4 paginiTwo Marks Questions With Answers Embedded SystemRameshbabu RamadassÎncă nu există evaluări
- Assignment 1Document10 paginiAssignment 1Katlego MaplankaÎncă nu există evaluări
- Stewart David B 1992 1Document21 paginiStewart David B 1992 1Márcio FerreiraÎncă nu există evaluări
- OS 2marks With Answers For All UnitsDocument19 paginiOS 2marks With Answers For All UnitsPraveen MohanÎncă nu există evaluări
- Module 3Document26 paginiModule 3OK BYEÎncă nu există evaluări
- OS Unit 1Document9 paginiOS Unit 1Rama Devi ChÎncă nu există evaluări
- "Operating System": A Seminar Report OnDocument13 pagini"Operating System": A Seminar Report OnMrChaitu ReddyÎncă nu există evaluări
- Types of SchedulerDocument5 paginiTypes of Schedulervikasrana1991Încă nu există evaluări
- Operating System QuestionsDocument15 paginiOperating System Questions7killers4uÎncă nu există evaluări
- Physical Computing: Exploring Computer Vision in Physical ComputingDe la EverandPhysical Computing: Exploring Computer Vision in Physical ComputingÎncă nu există evaluări
- Software Suite: Revolutionizing Computer Vision with the Ultimate Software SuiteDe la EverandSoftware Suite: Revolutionizing Computer Vision with the Ultimate Software SuiteÎncă nu există evaluări
- Efficia Infant WarmingDocument8 paginiEfficia Infant WarmingNurhidayat MursalinÎncă nu există evaluări
- Section 05120 Structural Steel Part 1Document43 paginiSection 05120 Structural Steel Part 1jacksondcplÎncă nu există evaluări
- Ain Tsila Development Main EPC Contract A-CNT-CON-000-00282 Subcontract N°: JI-2045/07-002BDocument15 paginiAin Tsila Development Main EPC Contract A-CNT-CON-000-00282 Subcontract N°: JI-2045/07-002BAslaouiÎncă nu există evaluări
- 06-901 Keyed Input SwitchesDocument4 pagini06-901 Keyed Input Switchesmajed al.madhajiÎncă nu există evaluări
- Folder Fiamm Neptune 2010 EngDocument4 paginiFolder Fiamm Neptune 2010 EngchokribÎncă nu există evaluări
- Nuevo CvuDocument1 paginăNuevo CvuJesús GonzálezÎncă nu există evaluări
- Le22a1321 AocDocument130 paginiLe22a1321 AocEchefisEchefisÎncă nu există evaluări
- Jacky Smith Resume Project ManagerDocument1 paginăJacky Smith Resume Project ManagerGrey GrayÎncă nu există evaluări
- High Integrity Aluminum (GENERAL)Document140 paginiHigh Integrity Aluminum (GENERAL)Kmilo Giraldo100% (3)
- GT User Manual Revision 1.10Document66 paginiGT User Manual Revision 1.10Pham LongÎncă nu există evaluări
- PNR90 PNR510 PNR91 PNR515 PNR92 PNR520: Manual of - Installation - Operating - Maintenance Heavy Oil Burners TypeDocument28 paginiPNR90 PNR510 PNR91 PNR515 PNR92 PNR520: Manual of - Installation - Operating - Maintenance Heavy Oil Burners Typec_lucian2004Încă nu există evaluări
- Online Examination System For AndroidDocument7 paginiOnline Examination System For AndroidSri Sai UniversityÎncă nu există evaluări
- Final Reporting GuidelinesDocument183 paginiFinal Reporting GuidelinesAkhmad NuzulÎncă nu există evaluări
- Honeywell P7640B1032 Differential Pressure Sensors PDFDocument2 paginiHoneywell P7640B1032 Differential Pressure Sensors PDFMarcello PorrinoÎncă nu există evaluări
- Know PlywoodDocument3 paginiKnow PlywoodNirvana NircisÎncă nu există evaluări
- SinxbyxDocument9 paginiSinxbyxGreeshmaÎncă nu există evaluări
- WEISER Locks and HardwareDocument24 paginiWEISER Locks and HardwareMaritime Door & WindowÎncă nu există evaluări
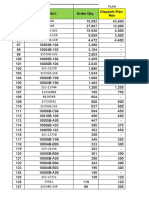
- Order Qty Vs Dispatch Plan - 04 11 20Document13 paginiOrder Qty Vs Dispatch Plan - 04 11 20NPD1 JAKAPÎncă nu există evaluări
- 8J Summary SheetDocument2 pagini8J Summary Sheet박찬우Încă nu există evaluări
- AI in RobotsDocument75 paginiAI in RobotsIslam SehsahÎncă nu există evaluări
- Skytrain Avia Services: Emergency Procedures ManualDocument32 paginiSkytrain Avia Services: Emergency Procedures ManualEndro RastadiÎncă nu există evaluări
- Cosben e Brochure PDFDocument28 paginiCosben e Brochure PDFsmw maintanceÎncă nu există evaluări
- A Sample of Wet Soil Has A Volume of 0Document8 paginiA Sample of Wet Soil Has A Volume of 0eph0% (1)
- Schematic Lenovo ThinkPad T410 NOZOMI-1Document99 paginiSchematic Lenovo ThinkPad T410 NOZOMI-1borneocampÎncă nu există evaluări
- Solar Pond - Awesome PDFDocument26 paginiSolar Pond - Awesome PDFKartik MahajanÎncă nu există evaluări
- Tutorial - 05 - Excavation Settle 3DDocument13 paginiTutorial - 05 - Excavation Settle 3DAlejandro Camargo SanabriaÎncă nu există evaluări
- David Lowe Thesis PDFDocument201 paginiDavid Lowe Thesis PDFKRISHNA VAMSHIÎncă nu există evaluări
- Shell Hazardous Area Classification FundamentalsDocument30 paginiShell Hazardous Area Classification Fundamentalsthekevindesai100% (17)
- Idlers - Medium To Heavy Duty PDFDocument28 paginiIdlers - Medium To Heavy Duty PDFEd Ace100% (1)