S-ar putea să vă placă și
- SatelliteDocument16 paginiSatelliteSurojeetÎncă nu există evaluări
- Action Analysis For Animators by Chris WebsterDocument409 paginiAction Analysis For Animators by Chris WebsterThomas Yandex100% (8)
- Adaptive Beamforming For Ds-Cdma Using Conjugate Gradient Algorithm in Multipath Fading ChannelDocument5 paginiAdaptive Beamforming For Ds-Cdma Using Conjugate Gradient Algorithm in Multipath Fading ChannelV'nod Rathode BÎncă nu există evaluări
- QPSK and 16qamDocument6 paginiQPSK and 16qamvelbon17006Încă nu există evaluări
- Adaptive Optical Multi-Aperture Receive Antenna For Coherent Intersatellite CommunicationsDocument10 paginiAdaptive Optical Multi-Aperture Receive Antenna For Coherent Intersatellite CommunicationsNilsonÎncă nu există evaluări
- Paper 5Document5 paginiPaper 5d20l211Încă nu există evaluări
- Communication Systems - 4th Edition - Carlson (616-631) MI APRTE PDFDocument16 paginiCommunication Systems - 4th Edition - Carlson (616-631) MI APRTE PDFDiego Jampier Muñoz ArroyoÎncă nu există evaluări
- GlobeComm DPC NewDocument6 paginiGlobeComm DPC Newsumitstop2Încă nu există evaluări
- Cdma Sparse Channel Estimation Using A Gsicam Algorithm For RadiDocument5 paginiCdma Sparse Channel Estimation Using A Gsicam Algorithm For Radiradha gulatiÎncă nu există evaluări
- An Approach For OTSPR - SubmissionDocument6 paginiAn Approach For OTSPR - SubmissionnstÎncă nu există evaluări
- Impact of T/R Module Performance On Tradeoff Design of Airborne Aesa RadarDocument4 paginiImpact of T/R Module Performance On Tradeoff Design of Airborne Aesa RadarAhmed HussainÎncă nu există evaluări
- Electronics: A Telemetry, Tracking, and Command Antennas System For Small-Satellite ApplicationsDocument15 paginiElectronics: A Telemetry, Tracking, and Command Antennas System For Small-Satellite ApplicationsDavid KenyoÎncă nu există evaluări
- Diversity and Multiplexing Techniques of 802.11n WLAN: Maciej KrasickiDocument5 paginiDiversity and Multiplexing Techniques of 802.11n WLAN: Maciej Krasickizizo1921Încă nu există evaluări
- Power Allocation in Cooperative Networks Using Differential Space-Time CodesDocument4 paginiPower Allocation in Cooperative Networks Using Differential Space-Time CodesballmerÎncă nu există evaluări
- Implementation of An Adaptive Antenna Array Using The TMS320C541Document11 paginiImplementation of An Adaptive Antenna Array Using The TMS320C541Harshvardhan ChoudharyÎncă nu există evaluări
- RCS Measurment Using PNADocument4 paginiRCS Measurment Using PNAsandeep yadavÎncă nu există evaluări
- To StudentsDocument5 paginiTo StudentsGayathri SrinivasaÎncă nu există evaluări
- Low Complexity Channel Estimation For 3GPP LTE Downlink MIMO OFDM SystemsDocument4 paginiLow Complexity Channel Estimation For 3GPP LTE Downlink MIMO OFDM Systemsshantz109Încă nu există evaluări
- Efficient Compensation of Frequency Selective TX and RX Iq Imbalances in Ofdm SystemsDocument10 paginiEfficient Compensation of Frequency Selective TX and RX Iq Imbalances in Ofdm Systemsfeirany01Încă nu există evaluări
- PMD Tolerant Direct-Detection Optical OFDM SystemDocument2 paginiPMD Tolerant Direct-Detection Optical OFDM SystemZainab FaydhÎncă nu există evaluări
- Improvement in Error Performance by Cooperation: Kamel Tourki and Luc DeneireDocument4 paginiImprovement in Error Performance by Cooperation: Kamel Tourki and Luc DeneireMazhaic MahamÎncă nu există evaluări
- A Novel Microstrip Patch Antenna With Large Impedance Bandwidth in Vhf/Uhf RangeDocument11 paginiA Novel Microstrip Patch Antenna With Large Impedance Bandwidth in Vhf/Uhf RangealkeshkhatriÎncă nu există evaluări
- An Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsDocument8 paginiAn Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsBrijesh GuptaÎncă nu există evaluări
- Adaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterDocument7 paginiAdaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterMatthew Luis Llano LoveraÎncă nu există evaluări
- N-Continuous Distortion For MIMO OFDM: Iterative Estimation and Cancellation of SystemsDocument4 paginiN-Continuous Distortion For MIMO OFDM: Iterative Estimation and Cancellation of SystemsMedhat MohÎncă nu există evaluări
- Publications SmartAntennasDocument8 paginiPublications SmartAntennasCatherine PetersÎncă nu există evaluări
- Analytical Calculations of CCDF For Some Common PAPR Reduction Techniques in OFDM SystemsDocument4 paginiAnalytical Calculations of CCDF For Some Common PAPR Reduction Techniques in OFDM SystemsDr-Eng Imad A. ShaheenÎncă nu există evaluări
- A 2GS/s 9-Bit 8-12x Time-Interleaved Pipeline-SAR ADC For A PMCW Radar in 28nm CMOSDocument4 paginiA 2GS/s 9-Bit 8-12x Time-Interleaved Pipeline-SAR ADC For A PMCW Radar in 28nm CMOSburakgonenÎncă nu există evaluări
- PSK Demodulation (Part 1)Document10 paginiPSK Demodulation (Part 1)particlereddyÎncă nu există evaluări
- Nokia Double Data Rate For FDD Downlink Through Channel Code Puncturing in MIMO ChannelsDocument4 paginiNokia Double Data Rate For FDD Downlink Through Channel Code Puncturing in MIMO ChannelsPhebeÎncă nu există evaluări
- High-Gain FabryProt Antenna With Reconfigurable Scattering Patterns Based On Varactor DiodesDocument9 paginiHigh-Gain FabryProt Antenna With Reconfigurable Scattering Patterns Based On Varactor DiodesAnurag PalÎncă nu există evaluări
- Fade Margin Calculation RiccianDocument4 paginiFade Margin Calculation RiccianjpollemisÎncă nu există evaluări
- 2006 Wireless Relay Communications Using An Unmanned Aerial VehicleDocument5 pagini2006 Wireless Relay Communications Using An Unmanned Aerial Vehicletoan đinhÎncă nu există evaluări
- Complex Simulation Model of Mobile Fading Channel: Tomáš Marek, Vladimír Pšenák, Vladimír WieserDocument6 paginiComplex Simulation Model of Mobile Fading Channel: Tomáš Marek, Vladimír Pšenák, Vladimír Wiesergzb012Încă nu există evaluări
- IEEEGlobecom2008 MGomesDocument5 paginiIEEEGlobecom2008 MGomesldpcÎncă nu există evaluări
- Spatial ModulationDocument4 paginiSpatial ModulationMohammed Al-AnsiÎncă nu există evaluări
- Modulation Schemes For Optical Wireless Communications: 4.1 Intensity Modulation and Direct Detection (IM/DD)Document68 paginiModulation Schemes For Optical Wireless Communications: 4.1 Intensity Modulation and Direct Detection (IM/DD)Juan Esteban Moreno VeraÎncă nu există evaluări
- Agenda Item: Source: Cwts Wg1 Title: Smart Antenna Technology Document For: ConsiderationDocument7 paginiAgenda Item: Source: Cwts Wg1 Title: Smart Antenna Technology Document For: ConsiderationMohamed Zakaria EbrahimÎncă nu există evaluări
- Narrow-Band Interference Suppression in Cdma Spread-Spectrum Communication Systems Using Pre-Processing Based Techniques in Transform-Domain P. Azmi and N. TavakkoliDocument10 paginiNarrow-Band Interference Suppression in Cdma Spread-Spectrum Communication Systems Using Pre-Processing Based Techniques in Transform-Domain P. Azmi and N. TavakkolineerajvarshneyÎncă nu există evaluări
- Chapter 2Document12 paginiChapter 2api-262297334Încă nu există evaluări
- Outage Probability Analysis of Wireless Relay and Cooperative Networks in Rician Fading Channels With Different - FactorsDocument5 paginiOutage Probability Analysis of Wireless Relay and Cooperative Networks in Rician Fading Channels With Different - FactorsballmerÎncă nu există evaluări
- Ostbc AND QSTBC: by Bala Aditya Krishna Kumar Madhav MageshDocument14 paginiOstbc AND QSTBC: by Bala Aditya Krishna Kumar Madhav MageshMadhav ThiyagarajanÎncă nu există evaluări
- Design Considerations For Direct RF Sampling Receiver in Gnss EnvironmentDocument6 paginiDesign Considerations For Direct RF Sampling Receiver in Gnss Environmenttrilokdhal962Încă nu există evaluări
- Average Fade CorrelationDocument5 paginiAverage Fade Correlationابراهيم السعيديÎncă nu există evaluări
- Uplink Single-User MIMO For 3GPP LTE: AbstractDocument5 paginiUplink Single-User MIMO For 3GPP LTE: AbstractRudynoÎncă nu există evaluări
- Matlab Code For MtechDocument47 paginiMatlab Code For MtechSangha MithraÎncă nu există evaluări
- MIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXDocument4 paginiMIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXNizar Ben Hadj YahiaÎncă nu există evaluări
- A New Blind Adaptive Antenna Array For GNSS Interference CancellationDocument5 paginiA New Blind Adaptive Antenna Array For GNSS Interference CancellationaliÎncă nu există evaluări
- Improving MIMO Spectral Efficiency in 4G Macro-Cellular NetworksDocument6 paginiImproving MIMO Spectral Efficiency in 4G Macro-Cellular Networksወንድሙ ዘገዬÎncă nu există evaluări
- Peak-To-Average Power Ratio Reduction by CB-ACE and Adaptive Ace AlgorithmsDocument8 paginiPeak-To-Average Power Ratio Reduction by CB-ACE and Adaptive Ace AlgorithmsShankar GaneshÎncă nu există evaluări
- MIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXDocument4 paginiMIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXkhanziaÎncă nu există evaluări
- Near-Field Source Localization With Partly Sensor Gain and Phase UncertaintiesDocument5 paginiNear-Field Source Localization With Partly Sensor Gain and Phase UncertaintiesWeiliang ZuoÎncă nu există evaluări
- Zhao 2016Document6 paginiZhao 2016Phuc DangÎncă nu există evaluări
- When Do Rotated Constellations Provide Gains?: Abstract-This Paper Aims at Providing Guidelines To NetworkDocument6 paginiWhen Do Rotated Constellations Provide Gains?: Abstract-This Paper Aims at Providing Guidelines To NetworkMichael Santiago SimbaÎncă nu există evaluări
- End-To-End Performance of A DPSK Multi-Input-Multi-Output Relaying System in Rayleigh Fading ChannelsDocument4 paginiEnd-To-End Performance of A DPSK Multi-Input-Multi-Output Relaying System in Rayleigh Fading ChannelsAnup DeyÎncă nu există evaluări
- An Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsDocument8 paginiAn Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsjdnfjngsÎncă nu există evaluări
- Satellite Links: 1 Transponder CharacteristicsDocument7 paginiSatellite Links: 1 Transponder CharacteristicsShuaibu ZakariyaÎncă nu există evaluări
- Energy Efficient Channel Estimation in MIMO Systems: Sarod Yatawatta, Athina P. Petropulu Charles J. GraffDocument4 paginiEnergy Efficient Channel Estimation in MIMO Systems: Sarod Yatawatta, Athina P. Petropulu Charles J. GraffgbafnaÎncă nu există evaluări
- AmeypaperDocument5 paginiAmeypaperamey salunkeÎncă nu există evaluări
- Draft: On The Site Selection Diversity TransmissionDocument8 paginiDraft: On The Site Selection Diversity TransmissionAbhinav TripathiÎncă nu există evaluări
- Frontinus - Water Management of RomeDocument68 paginiFrontinus - Water Management of RomezElfmanÎncă nu există evaluări
- Chapter 5 AGVDocument76 paginiChapter 5 AGVQuỳnh NguyễnÎncă nu există evaluări
- PTP S3Document8 paginiPTP S3Yongyin SHENGÎncă nu există evaluări
- Datasheet Ark XH Battery System EngDocument2 paginiDatasheet Ark XH Battery System EngLisa CowenÎncă nu există evaluări
- Clinical Case StudyDocument20 paginiClinical Case Studyapi-252004748Încă nu există evaluări
- Sw34 Religion, Secularism and The Environment by NasrDocument19 paginiSw34 Religion, Secularism and The Environment by Nasrbawah61455Încă nu există evaluări
- YellowstoneDocument1 paginăYellowstoneOana GalbenuÎncă nu există evaluări
- All About PlantsDocument14 paginiAll About Plantsapi-234860390Încă nu există evaluări
- By This Axe I Rule!Document15 paginiBy This Axe I Rule!storm0% (1)
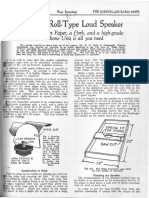
- Simple Roll-Type: A Loud SpeakerDocument1 paginăSimple Roll-Type: A Loud SpeakerEudes SilvaÎncă nu există evaluări
- Banachek UnlimitedDocument34 paginiBanachek UnlimitedserenaÎncă nu există evaluări
- 2 Contoh Narative TextDocument9 pagini2 Contoh Narative TextRini RienzÎncă nu există evaluări
- Mathematical Modeling of Mechanical Systems and Electrical SystemsDocument49 paginiMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamÎncă nu există evaluări
- 1.1 The Prescription of Blood ComponentsDocument9 pagini1.1 The Prescription of Blood ComponentsagurtovicÎncă nu există evaluări
- Engineering Structures: C.X. Dong, A.K.H. Kwan, J.C.M. HoDocument14 paginiEngineering Structures: C.X. Dong, A.K.H. Kwan, J.C.M. HoElieser SinagaÎncă nu există evaluări
- Aesculap Saw GD307 - Service ManualDocument16 paginiAesculap Saw GD307 - Service ManualFredi PançiÎncă nu există evaluări
- CE Review GEOMETRY 2Document6 paginiCE Review GEOMETRY 2Paul Gerard AguilarÎncă nu există evaluări
- Rac Question PaperDocument84 paginiRac Question PaperibrahimÎncă nu există evaluări
- Chemical Bonds WorksheetDocument2 paginiChemical Bonds WorksheetJewel Mae MercadoÎncă nu există evaluări
- Electrical Power System Device Function NumberDocument2 paginiElectrical Power System Device Function Numberdan_teegardenÎncă nu există evaluări
- Cell Wall Synthesis InhibitorsDocument6 paginiCell Wall Synthesis InhibitorsRPh Krishna Chandra JagritÎncă nu există evaluări
- Sch3u Exam Review Ws s2018 PDFDocument4 paginiSch3u Exam Review Ws s2018 PDFwdsfÎncă nu există evaluări
- QuantAssay Software Manual 11-Mar-2019Document51 paginiQuantAssay Software Manual 11-Mar-2019LykasÎncă nu există evaluări
- The Ieee Test System Methods: Reliability ofDocument11 paginiThe Ieee Test System Methods: Reliability ofFsdaSdsÎncă nu există evaluări
- ChipmunkDocument19 paginiChipmunkema.nemec13Încă nu există evaluări
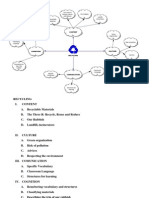
- Recycling Mind MapDocument2 paginiRecycling Mind Mapmsole124100% (1)
- Rankine-Hugoniot Curve: CJ: Chapman JouguetDocument6 paginiRankine-Hugoniot Curve: CJ: Chapman Jouguetrattan5Încă nu există evaluări
- Aluminium Alloy - Wikipedia, The Free EncyclopediaDocument12 paginiAluminium Alloy - Wikipedia, The Free EncyclopediaAshishJoshi100% (1)