S-ar putea să vă placă și
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- List of Documentary Requirements For BizDocument1 paginăList of Documentary Requirements For BizRJFL Heavy Equipment ManufacturingÎncă nu există evaluări
- ASCO-Avtron Catalog 608 RevA-11-3-15 PDFDocument10 paginiASCO-Avtron Catalog 608 RevA-11-3-15 PDFBedulÎncă nu există evaluări
- MC79M00 Series 500 Ma Negative Voltage RegulatorsDocument11 paginiMC79M00 Series 500 Ma Negative Voltage RegulatorsAnonymous oEoCVNhu7HÎncă nu există evaluări
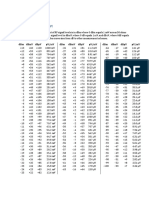
- Dbm Conversion Chart: Dbm Dbmv Dbμv Μv/Mv Dbm Dbmv Dbμv Μv/Mv Dbm Dbmv Dbμv Μv/MvDocument1 paginăDbm Conversion Chart: Dbm Dbmv Dbμv Μv/Mv Dbm Dbmv Dbμv Μv/Mv Dbm Dbmv Dbμv Μv/Mvjose luisÎncă nu există evaluări
- CAT - Resolucion Falla Engine Speed - TestDocument6 paginiCAT - Resolucion Falla Engine Speed - TestSebastian Rodrigo OctavianoÎncă nu există evaluări
- En 50618-2014Document29 paginiEn 50618-2014Dominic Santiago100% (7)
- Power System Engineering - Unit 5 - Week 3Document5 paginiPower System Engineering - Unit 5 - Week 3Deep GandhiÎncă nu există evaluări
- How Voltage Doublers WorkDocument2 paginiHow Voltage Doublers WorkErole Technologies Pvt ltd Homemade EngineerÎncă nu există evaluări
- Battery Technology: Lithium Flow BatteriesDocument14 paginiBattery Technology: Lithium Flow BatteriesdepakÎncă nu există evaluări
- Siemens Bs 240 Bs 241 BrochureDocument4 paginiSiemens Bs 240 Bs 241 Brochuremegamaster0987654321Încă nu există evaluări
- 43uj6560-Sb 8902 9202 RS232C PDFDocument50 pagini43uj6560-Sb 8902 9202 RS232C PDFfaradioÎncă nu există evaluări
- LG CH - LD91L 42SL9000.42SL9500 Service Manual PDFDocument60 paginiLG CH - LD91L 42SL9000.42SL9500 Service Manual PDFElec ThaihoaÎncă nu există evaluări
- Micro-Hydro Power PDFDocument8 paginiMicro-Hydro Power PDFPedro Teixeira100% (1)
- ENGINEERING PROJECTS (2016-2017) : Cael Technosoft - An Industrial Project CenterDocument52 paginiENGINEERING PROJECTS (2016-2017) : Cael Technosoft - An Industrial Project CentersathishÎncă nu există evaluări
- Internal LightingDocument52 paginiInternal Lightingaeliusmano100% (1)
- AnswersDocument34 paginiAnswersMahmoud Elsayed MohamedÎncă nu există evaluări
- MH 504: Modelling and Simulation of Mechatronic SystemsDocument45 paginiMH 504: Modelling and Simulation of Mechatronic SystemsJagat Dada 2.0Încă nu există evaluări
- Indoor Voltage Transformer Fuses, WBP Outdoor Voltage Transformer Fuses, BRTDocument8 paginiIndoor Voltage Transformer Fuses, WBP Outdoor Voltage Transformer Fuses, BRTThi Huyen Trang VuÎncă nu există evaluări
- Reactive Power Compensation in The Four Load Quadrants: 7.1.1 Technical ConsiderationDocument3 paginiReactive Power Compensation in The Four Load Quadrants: 7.1.1 Technical ConsiderationNM GroupÎncă nu există evaluări
- RTD Questions and AnswersDocument19 paginiRTD Questions and AnswersJêmš NavikÎncă nu există evaluări
- Fire Alarm Voltage Drop PresentationDocument19 paginiFire Alarm Voltage Drop Presentationem00105100% (1)
- HP Service Note 412AR 2Document1 paginăHP Service Note 412AR 2xibmÎncă nu există evaluări
- WWW - Iranswitching.Ir: Ac/Dc Switch Mode Power Supply Design GuideDocument2 paginiWWW - Iranswitching.Ir: Ac/Dc Switch Mode Power Supply Design GuidedraÎncă nu există evaluări
- TM 9 6115 668 13Document664 paginiTM 9 6115 668 13Anonymous AzdmXj2Încă nu există evaluări
- Arduino On Breadboard Bootloader PDFDocument16 paginiArduino On Breadboard Bootloader PDFKuldeep SinghÎncă nu există evaluări
- Brief Information: Strong Tone Horn Set S90Document2 paginiBrief Information: Strong Tone Horn Set S90Dhimas NÎncă nu există evaluări
- Data Sheet For SINUMERIK PP 72/48D PN: Rated Data Ambient ConditionsDocument1 paginăData Sheet For SINUMERIK PP 72/48D PN: Rated Data Ambient ConditionsZForeÎncă nu există evaluări
- Nikhila GaAs TechnologyDocument24 paginiNikhila GaAs Technologyaboot507Încă nu există evaluări
- Kabel Instrumen OflexDocument30 paginiKabel Instrumen Oflextwo travellerÎncă nu există evaluări
- 4.3 Inch LCD MULTI-FUNCTIONAL GENERATORS GENSET CONTROLLER DC72DDocument5 pagini4.3 Inch LCD MULTI-FUNCTIONAL GENERATORS GENSET CONTROLLER DC72DJuan José Tovar PérezÎncă nu există evaluări