S-ar putea să vă placă și
- A Survey of Digital Library Aggregation ServicesDocument112 paginiA Survey of Digital Library Aggregation ServicesMahesh VankaÎncă nu există evaluări
- Defence Standard 02-0617Document84 paginiDefence Standard 02-0617Mahesh Vanka100% (1)
- Computer Simulation Design of An UWB Proximity Fuze Impulser Based On SRDDocument3 paginiComputer Simulation Design of An UWB Proximity Fuze Impulser Based On SRDMahesh VankaÎncă nu există evaluări
- Flight InsuranceDocument1 paginăFlight InsurancesammachomanÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 90852A+ Aoyue Hot Air Station en PDFDocument10 pagini90852A+ Aoyue Hot Air Station en PDFMatthieuÎncă nu există evaluări
- CH 5 - Engine ElectricalDocument62 paginiCH 5 - Engine ElectricalEnrrique LaraÎncă nu există evaluări
- Mid Term Essay Writing RyandikhaDocument5 paginiMid Term Essay Writing RyandikhaRyandikha OktaviandiÎncă nu există evaluări
- Search Engine MarketingDocument7 paginiSearch Engine Marketingyuvaraj321321Încă nu există evaluări
- Game LogDocument29 paginiGame LogMaja DenderaÎncă nu există evaluări
- Wistron AG1 - SA - Acer Duo Core Power On SequenceDocument10 paginiWistron AG1 - SA - Acer Duo Core Power On SequenceougeyfÎncă nu există evaluări
- KSK BenefitsDocument13 paginiKSK Benefitsksm256Încă nu există evaluări
- Social Media Safety TipsDocument5 paginiSocial Media Safety TipsIthran IthranÎncă nu există evaluări
- Advanced Python Lab GuideDocument38 paginiAdvanced Python Lab GuideNetflix ChatbotÎncă nu există evaluări
- Project SpecificationDocument8 paginiProject SpecificationYong ChengÎncă nu există evaluări
- Online CommunicationDocument14 paginiOnline CommunicationClarin FleminÎncă nu există evaluări
- RPA Development Life CycleDocument22 paginiRPA Development Life CycleDrAnand ShankarÎncă nu există evaluări
- COA - Chapter # 3Document26 paginiCOA - Chapter # 3Set EmpÎncă nu există evaluări
- ModbusTCP PDFDocument2 paginiModbusTCP PDFGeorge GaitanakisÎncă nu există evaluări
- Automotive RelaysDocument195 paginiAutomotive RelaysKhuyen NguyenÎncă nu există evaluări
- HTML Questions Answers to Front-end Job Interview QuestionsDocument7 paginiHTML Questions Answers to Front-end Job Interview Questionsmcn37803Încă nu există evaluări
- DS-2TD4136-25/50: Thermal & Optical Bi-Spectrum Network Speed DomeDocument5 paginiDS-2TD4136-25/50: Thermal & Optical Bi-Spectrum Network Speed Domeal lakwenaÎncă nu există evaluări
- Batch Rm111 en PDocument538 paginiBatch Rm111 en PFranky RiveroÎncă nu există evaluări
- Electrical Safety Analyzer: 6Huylfh0DqxdoDocument52 paginiElectrical Safety Analyzer: 6Huylfh0Dqxdoservice serviceÎncă nu există evaluări
- Mysql Connector/C++ Developer GuideDocument76 paginiMysql Connector/C++ Developer GuidePedro BazóÎncă nu există evaluări
- Online Bike ShowroomDocument11 paginiOnline Bike ShowroomsandipÎncă nu există evaluări
- GP PowerBank M520 DataDocument2 paginiGP PowerBank M520 DataElectronÎncă nu există evaluări
- 1.0 A Negative Voltage Regulators MC7900 Series: TO 220 T Suffix Case 221abDocument17 pagini1.0 A Negative Voltage Regulators MC7900 Series: TO 220 T Suffix Case 221abjoseÎncă nu există evaluări
- Cobham Tactical Comms and Surveillance Short Product GuideDocument12 paginiCobham Tactical Comms and Surveillance Short Product GuidekarakogluÎncă nu există evaluări
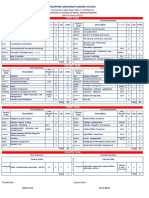
- Philippine Merchant Marine School: First YearDocument5 paginiPhilippine Merchant Marine School: First YearCris Mhar Alejandro100% (1)
- Electrical SubstationsDocument16 paginiElectrical SubstationsEngr Syed Numan ShahÎncă nu există evaluări
- Tracer AN Series Solar Charge Controller User ManualDocument44 paginiTracer AN Series Solar Charge Controller User ManualtalibanindonesiaÎncă nu există evaluări
- Ingun Ada Catalogue enDocument80 paginiIngun Ada Catalogue enMichael DoyleÎncă nu există evaluări
- Unit 2 ECommerce ApplicationsDocument63 paginiUnit 2 ECommerce ApplicationsSuresh Babu C VÎncă nu există evaluări
- Impact of Partial Shading On The Output Power of PV Systems Under Partial Shading ConditionsDocument10 paginiImpact of Partial Shading On The Output Power of PV Systems Under Partial Shading Conditionsshihab4806Încă nu există evaluări