S-ar putea să vă placă și
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe la EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosEvaluare: 5 din 5 stele5/5 (5)
- Arduino. Trucos y secretos.: 120 ideas para resolver cualquier problemaDe la EverandArduino. Trucos y secretos.: 120 ideas para resolver cualquier problemaEvaluare: 5 din 5 stele5/5 (5)
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosDe la EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosEvaluare: 4.5 din 5 stele4.5/5 (14)
- Curso Arduino - Módulos IntermedioDocument143 paginiCurso Arduino - Módulos IntermedioPablo V Salazar100% (10)
- Primeros Pasos Con Arduino y XBeeDocument9 paginiPrimeros Pasos Con Arduino y XBeeMC. Rene Solis R.80% (5)
- Libro Basico ArduinoDocument120 paginiLibro Basico ArduinoJimena AL95% (21)
- Tutorial Arduino 04 - EjerciciosDocument15 paginiTutorial Arduino 04 - EjerciciosMC. Rene Solis R.100% (3)
- Practicas Con Arduino 2 ExcelenteDocument123 paginiPracticas Con Arduino 2 Excelentewaport100% (19)
- ArduinoDocument36 paginiArduinoTomas Rodriguez100% (2)
- Libro Azul Manual Arduino en EspañolDocument123 paginiLibro Azul Manual Arduino en EspañolAngel Herbra91% (35)
- Arduinoprctico2014 140712025133 Phpapp02Document60 paginiArduinoprctico2014 140712025133 Phpapp02Brian Zuñagua FloresÎncă nu există evaluări
- Libro Basico ArduinoDocument120 paginiLibro Basico ArduinoAristoteles Carreño100% (6)
- Libro Practicas ArduinoDocument91 paginiLibro Practicas Arduinoalex100% (3)
- Ejercicios de Arduino ResueltosDocument31 paginiEjercicios de Arduino ResueltosAlberto Espinoza92% (12)
- Apuntes Arduino Nivel EnterailloDocument28 paginiApuntes Arduino Nivel EnterailloRey Arturo100% (7)
- Programacion ArduinoDocument29 paginiProgramacion ArduinoMacramé100% (3)
- Tutorial Con Arduino para Mover Un Motor DCDocument5 paginiTutorial Con Arduino para Mover Un Motor DCJose Cuida100% (4)
- Guia MCI - Servo Motor Con ArduinoDocument7 paginiGuia MCI - Servo Motor Con Arduinobitos2002Încă nu există evaluări
- Manual de Electronica Con ArduinoDocument51 paginiManual de Electronica Con Arduinoadolfo castillo100% (3)
- ArduinoDocument124 paginiArduinoYous Dv67% (15)
- Arduino para principiantesDocument30 paginiArduino para principiantesMario Peña100% (4)
- Practicas Arduino Muy BuenoDocument78 paginiPracticas Arduino Muy BuenoJavier100% (6)
- Guia de Arduino para Principiantes Proyectos y TutorialesDocument171 paginiGuia de Arduino para Principiantes Proyectos y TutorialesKikote Cas Es90% (10)
- Practicas Con Arduino Nivel IDocument73 paginiPracticas Con Arduino Nivel Ialvaronevi100% (6)
- Taller de Arduino. Experimentando con Arduino MKR 1010De la EverandTaller de Arduino. Experimentando con Arduino MKR 1010Încă nu există evaluări
- Arduino. Edición 2018 Curso prácticoDe la EverandArduino. Edición 2018 Curso prácticoEvaluare: 4 din 5 stele4/5 (15)
- Robótica y domótica básica con Arduino: Contiene 28 prácticas explicadasDe la EverandRobótica y domótica básica con Arduino: Contiene 28 prácticas explicadasÎncă nu există evaluări
- Aprender Raspberry Pi 4 con 100 ejercicios prácticosDe la EverandAprender Raspberry Pi 4 con 100 ejercicios prácticosEvaluare: 5 din 5 stele5/5 (4)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe la EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadEvaluare: 5 din 5 stele5/5 (1)
- ARDUINO - Aplicaciones en Robótica, Mecatrónica e IngenieríasDe la EverandARDUINO - Aplicaciones en Robótica, Mecatrónica e IngenieríasEvaluare: 5 din 5 stele5/5 (1)
- Monitoreo, control y adquisición de datos con arduino y visual basic .netDe la EverandMonitoreo, control y adquisición de datos con arduino y visual basic .netÎncă nu există evaluări
- Robótica y domótica básica con Arduino: Ingeniería de control automáticoDe la EverandRobótica y domótica básica con Arduino: Ingeniería de control automáticoEvaluare: 4.5 din 5 stele4.5/5 (7)
- Desarrollo de aplicaciones IoT en la nube para Arduino y ESP8266De la EverandDesarrollo de aplicaciones IoT en la nube para Arduino y ESP8266Evaluare: 5 din 5 stele5/5 (2)
- 100 circuitos de shields para arduino (español)De la Everand100 circuitos de shields para arduino (español)Evaluare: 3.5 din 5 stele3.5/5 (3)
- Google Assistant. Desarrollo de aplicaciones IoT para Arduino y ESP8266De la EverandGoogle Assistant. Desarrollo de aplicaciones IoT para Arduino y ESP8266Încă nu există evaluări
- Processing: Desarrollo de interfaces de usuario, aplicaciones de visión artificial e IoT para Arduino y ESP8266De la EverandProcessing: Desarrollo de interfaces de usuario, aplicaciones de visión artificial e IoT para Arduino y ESP8266Evaluare: 5 din 5 stele5/5 (1)
- Arduino. Guía práctica de fundamentos y simulación: RobóticaDe la EverandArduino. Guía práctica de fundamentos y simulación: RobóticaEvaluare: 4.5 din 5 stele4.5/5 (5)
- Alexa. Desarrollo de aplicaciones IoT para Arduino y ESP8266De la EverandAlexa. Desarrollo de aplicaciones IoT para Arduino y ESP8266Încă nu există evaluări
- Robótica educativa.: RobóticaDe la EverandRobótica educativa.: RobóticaÎncă nu există evaluări
- El Mundo Genuino-Arduino: Curso práctico de formaciónDe la EverandEl Mundo Genuino-Arduino: Curso práctico de formaciónÎncă nu există evaluări
- Robótica Educativa. Prácticas y Actividades: RobóticaDe la EverandRobótica Educativa. Prácticas y Actividades: RobóticaEvaluare: 3.5 din 5 stele3.5/5 (2)
- Aprende electrónica con Arduino: Una guía ilustrada para principiantes sobre la informática físicaDe la EverandAprende electrónica con Arduino: Una guía ilustrada para principiantes sobre la informática físicaÎncă nu există evaluări
- ARDUINODocument44 paginiARDUINOFabio Arce EÎncă nu există evaluări
- Manual Programacion ArduinoDocument68 paginiManual Programacion Arduinobedahom66Încă nu există evaluări
- Manual MapleDocument17 paginiManual MapleAlfonso Aguilar AcevedoÎncă nu există evaluări
- Curso Basico Arduino IDEDocument157 paginiCurso Basico Arduino IDEAlfre Develope0% (1)
- Tema1 ProgramacionbasicaenarduinoDocument11 paginiTema1 ProgramacionbasicaenarduinochristiamÎncă nu există evaluări
- Capitulo 3 Lenguaje de Programacion para Arduino: 3.1 IntroducciónDocument22 paginiCapitulo 3 Lenguaje de Programacion para Arduino: 3.1 IntroducciónMiguel AlvarezÎncă nu există evaluări
- Guia Practicas ArduinoDocument18 paginiGuia Practicas ArduinofannyÎncă nu există evaluări
- Curso de ArduinoDocument23 paginiCurso de ArduinoHexy ZÎncă nu există evaluări
- Introducción a la programación en ArduinoDocument5 paginiIntroducción a la programación en ArduinoOswaldo samanoÎncă nu există evaluări
- Respuesta Temporal Segundo OrdenDocument10 paginiRespuesta Temporal Segundo OrdenlupoecuÎncă nu există evaluări
- Conceptos Básicos TMsdfEDocument11 paginiConceptos Básicos TMsdfEJose Torres NuñezÎncă nu există evaluări
- Mplab V8.00Document20 paginiMplab V8.00cymonso100% (2)
- AnovaDocument32 paginiAnovaJulián HernándezÎncă nu există evaluări
- Ejercicios Propuestos Estructuras IsaostaticasDocument9 paginiEjercicios Propuestos Estructuras IsaostaticasJose Torres NuñezÎncă nu există evaluări
- ListadoMasEjercicios (Ad1)Document1 paginăListadoMasEjercicios (Ad1)Jose Torres NuñezÎncă nu există evaluări
- Ejemplos Redes de PetriDocument23 paginiEjemplos Redes de PetriAnxo Do Forte100% (3)
- Transmisión Modulación Angular FMDocument8 paginiTransmisión Modulación Angular FMJhon Chuyma AroneÎncă nu există evaluări
- Acreditacion Del Conocimiento de Una Lengua Extranjera para La Obtencion Del Grado y Acceso A MasterDocument7 paginiAcreditacion Del Conocimiento de Una Lengua Extranjera para La Obtencion Del Grado y Acceso A MasterGsus84Încă nu există evaluări
- Ejercicio ExamenDocument3 paginiEjercicio ExamenJose Torres NuñezÎncă nu există evaluări
- Calendario Academico de Grado 2015-2016Document3 paginiCalendario Academico de Grado 2015-2016Jose Torres NuñezÎncă nu există evaluări
- Ejecicios AdicionaalesDocument2 paginiEjecicios AdicionaalesJose Torres NuñezÎncă nu există evaluări
- Calendario Academico de Grado 2015-2016Document3 paginiCalendario Academico de Grado 2015-2016Jose Torres NuñezÎncă nu există evaluări
- Latex Manual PDFDocument41 paginiLatex Manual PDFJulieta MassÎncă nu există evaluări
- Calendario Academico de Grado 2015-2016Document3 paginiCalendario Academico de Grado 2015-2016Jose Torres NuñezÎncă nu există evaluări
- Calendario Academico de Grado 2015-2016Document3 paginiCalendario Academico de Grado 2015-2016Jose Torres NuñezÎncă nu există evaluări
- Ejercicios Informática Industrial 2013-14Document5 paginiEjercicios Informática Industrial 2013-14ferny92Încă nu există evaluări
- Vigas Contínuas y Pórticos HiperestáticosDocument138 paginiVigas Contínuas y Pórticos Hiperestáticoshernan8585% (27)
- Cinematica Del RobotDocument23 paginiCinematica Del RobotLuis Aguilar OrellanaÎncă nu există evaluări
- Tema 2Document58 paginiTema 2Jose Torres NuñezÎncă nu există evaluări
- JFETDocument22 paginiJFETJose Torres NuñezÎncă nu există evaluări
- Prontuario EstructurasDocument52 paginiProntuario Estructurasneomatrix2009Încă nu există evaluări
- Cinematica Del RobotDocument23 paginiCinematica Del RobotLuis Aguilar OrellanaÎncă nu există evaluări
- 1415 TeoriaDocument12 pagini1415 TeoriaJose Torres NuñezÎncă nu există evaluări
- Preguntas Test Tema 2 PDFDocument6 paginiPreguntas Test Tema 2 PDFJose Torres NuñezÎncă nu există evaluări
- Ejercicios DiodosDocument2 paginiEjercicios Diodoseber000% (1)
- Problemas Tema 3Document5 paginiProblemas Tema 3Jose Torres NuñezÎncă nu există evaluări
- Teoría Física TermodinámicaDocument10 paginiTeoría Física TermodinámicaJose Torres NuñezÎncă nu există evaluări
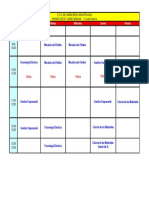
- Horarios 2 Curso Grados 1 Cuatrimestre PDFDocument1 paginăHorarios 2 Curso Grados 1 Cuatrimestre PDFJose Torres NuñezÎncă nu există evaluări
- Principios Generales de ConcurrenciaDocument17 paginiPrincipios Generales de ConcurrenciaGabriel MontesinosÎncă nu există evaluări
- Modificadores de Acceso y Sobrecarga de MétodosDocument34 paginiModificadores de Acceso y Sobrecarga de MétodosjeshuitamÎncă nu există evaluări
- Herramienta de Soporte para Programadores Con Discapacidad Visual Mediante El Marcado de Cdigo Fuente Not Available in EnglishDocument4 paginiHerramienta de Soporte para Programadores Con Discapacidad Visual Mediante El Marcado de Cdigo Fuente Not Available in EnglishAndrew AcostaÎncă nu există evaluări
- Paradigma de ProgramaciónDocument18 paginiParadigma de ProgramaciónfuchimaÎncă nu există evaluări
- Buenasprcticas 120207123334 Phpapp02Document74 paginiBuenasprcticas 120207123334 Phpapp02Marco Antonio LetelierÎncă nu există evaluări
- Historia C++ desde C y sus antecesores BCPL, BDocument4 paginiHistoria C++ desde C y sus antecesores BCPL, BJoshua LozaÎncă nu există evaluări
- Presentacion 2 - ABAP ObjectsDocument45 paginiPresentacion 2 - ABAP ObjectsLuis QuinteroÎncă nu există evaluări
- S03 S1-MaterialDocument17 paginiS03 S1-MaterialJose VasquezÎncă nu există evaluări
- Conceptos Básicos de FlutterDocument7 paginiConceptos Básicos de FlutterJose Enrique Rodriguez100% (1)
- Semana 15 - AutoevaluacionDocument13 paginiSemana 15 - AutoevaluacionBRAULIO ABELARDO SIANCAS RODRIGUEZÎncă nu există evaluări
- Lenguajes de Alto Nivel, Ensamblador y Código de MáquinaDocument26 paginiLenguajes de Alto Nivel, Ensamblador y Código de MáquinaCarlos Rodriguez BernalÎncă nu există evaluări
- Tecnología Industrial (Andalucía)Document7 paginiTecnología Industrial (Andalucía)Antonio Peregrina CarriónÎncă nu există evaluări
- Quiz 2 - Semana 7 - Ra - Primer Bloque-Programacion de Computadores - (Grupo5) NewDocument11 paginiQuiz 2 - Semana 7 - Ra - Primer Bloque-Programacion de Computadores - (Grupo5) NewBestialidadesÎncă nu există evaluări
- Que Es Un Modelo c4Document9 paginiQue Es Un Modelo c4Ivanova San LucasÎncă nu există evaluări
- Power ShellDocument13 paginiPower Shelldghfhgfhf fghfhfÎncă nu există evaluări
- Ventajas y DesventajasDocument5 paginiVentajas y DesventajasScorpion GaymerÎncă nu există evaluări
- Guía 1 Fundamentos Basicos de CNCDocument4 paginiGuía 1 Fundamentos Basicos de CNCGonzalo VillalobosÎncă nu există evaluări
- MetodoSimplex ResumenDocument1 paginăMetodoSimplex Resumenandres velasquezÎncă nu există evaluări
- Unidad 06 Estructuras Básicas C++Document7 paginiUnidad 06 Estructuras Básicas C++Yaris Margarita Vargas ContrerasÎncă nu există evaluări
- Practica 8 Códificación de HammingDocument21 paginiPractica 8 Códificación de HammingAdolfo LopezÎncă nu există evaluări
- Introducción A La ProgramaciónDocument15 paginiIntroducción A La Programaciónabejita araÎncă nu există evaluări
- Taller 1 Programacion Orientada Al ObjetoDocument2 paginiTaller 1 Programacion Orientada Al ObjetoEdgardo Alonso RiveraÎncă nu există evaluări
- Agenda Estudiantes JavaDocument4 paginiAgenda Estudiantes JavaJefe Jorch FénixÎncă nu există evaluări
- Informe AplicativoDocument33 paginiInforme AplicativojhonÎncă nu există evaluări
- Programación A - Material DidácticoDocument107 paginiProgramación A - Material DidácticoSamotelmagoÎncă nu există evaluări
- Arrays en C#Document18 paginiArrays en C#pablo roqueÎncă nu există evaluări
- Curso de Python - Sesion 01Document22 paginiCurso de Python - Sesion 01daniel vigoÎncă nu există evaluări
- Manual Jquery PDFDocument200 paginiManual Jquery PDFyaredita2Încă nu există evaluări
- Los Lenguajes de Programación de Alto NivelDocument11 paginiLos Lenguajes de Programación de Alto NivelJavier Hdz TristanÎncă nu există evaluări
- Campo 6Document11 paginiCampo 6Raúl Sebastián Cerna BarriosÎncă nu există evaluări