S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Structural Dynamics by Finite ElementsDocument308 paginiStructural Dynamics by Finite ElementsLuis Ortiz71% (7)
- Counting Surfaces - B. EynardDocument427 paginiCounting Surfaces - B. EynardFernanda Florido100% (1)
- Group Theory by Flipping The MattressDocument9 paginiGroup Theory by Flipping The Mattressvinita_95742Încă nu există evaluări
- GRHW 1Document2 paginiGRHW 1Kastalia Delaporta0% (1)
- FFT Image ProcessingDocument116 paginiFFT Image ProcessingMarco Shrimpie CoetzerÎncă nu există evaluări
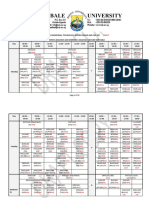
- Fetadfa Lecture Time Table Semester I 2023 - 24 and Semester II 2022 - 23 DraftDocument12 paginiFetadfa Lecture Time Table Semester I 2023 - 24 and Semester II 2022 - 23 Draftamosainamani6Încă nu există evaluări
- General Mathematics-FINALDocument187 paginiGeneral Mathematics-FINALDummy AccountÎncă nu există evaluări
- 2.3 Real Zeros of PolynomialDocument35 pagini2.3 Real Zeros of PolynomialYukiC123Încă nu există evaluări
- COMSATS Institute of Information Technology Abbottabad: Course Outline - Semester Fall 2019Document4 paginiCOMSATS Institute of Information Technology Abbottabad: Course Outline - Semester Fall 2019Haider AliÎncă nu există evaluări
- Co - Ordinate Systems: Engr. Mansoor A. Soomro Assistant Professor, Department of Electrical Engineering, MUET, JamshoroDocument28 paginiCo - Ordinate Systems: Engr. Mansoor A. Soomro Assistant Professor, Department of Electrical Engineering, MUET, JamshoroAwesh KumarÎncă nu există evaluări
- Kuan C.-M. Introduction To Econometric Theory (LN, Taipei, 2002) (202s) - GLDocument202 paginiKuan C.-M. Introduction To Econometric Theory (LN, Taipei, 2002) (202s) - GLMateus RamalhoÎncă nu există evaluări
- Numerical Methods SyllabusDocument2 paginiNumerical Methods SyllabusArun C Sai100% (1)
- Review Exercises For Chapter 12Document9 paginiReview Exercises For Chapter 12Kelly MenorÎncă nu există evaluări
- 3 - Root Locus Design Method For DC Motor Position ControlDocument9 pagini3 - Root Locus Design Method For DC Motor Position Controledgartepe4324Încă nu există evaluări
- Advanced Mathematics Module 3: Systems of Linear Equations: Prepared byDocument13 paginiAdvanced Mathematics Module 3: Systems of Linear Equations: Prepared byJohn Steven LlorcaÎncă nu există evaluări
- Introduction To Differential Equations - Ryan Lok-Wing PangDocument41 paginiIntroduction To Differential Equations - Ryan Lok-Wing PangPang Lok WingÎncă nu există evaluări
- Edwin VargasDocument20 paginiEdwin VargasMaximilian Renato Farfan PastranaÎncă nu există evaluări
- ITF-DPP#01 Mains PDFDocument3 paginiITF-DPP#01 Mains PDFAkshit MaheshwariÎncă nu există evaluări
- CH 1 Relations and Functions Multiple Choice Questions With Answers PDFDocument3 paginiCH 1 Relations and Functions Multiple Choice Questions With Answers PDFAnindya100% (4)
- Maths 2018 Guess PaperDocument23 paginiMaths 2018 Guess PapersuyashÎncă nu există evaluări
- The Transition From Calculus and To AnalysisDocument14 paginiThe Transition From Calculus and To AnalysisAlfonso Gómez MulettÎncă nu există evaluări
- Maths 1 Question Paper Nov Dec 2010Document4 paginiMaths 1 Question Paper Nov Dec 2010suriteddyÎncă nu există evaluări
- Lecture Notes in Topological Aspects of Condensced Matter PhysicsDocument129 paginiLecture Notes in Topological Aspects of Condensced Matter Physicsnouserhere123Încă nu există evaluări
- Numerical Methods NotesDocument180 paginiNumerical Methods NotesSyed Hasif Sy Mohamad100% (1)
- The Hopf Fibration and Encoding Torus Knots in Light FieldsDocument70 paginiThe Hopf Fibration and Encoding Torus Knots in Light Fieldsعمرو دراغمةÎncă nu există evaluări
- Maths QP Set-1Document6 paginiMaths QP Set-1Zam NaizamÎncă nu există evaluări
- Solutions To Exercise Set 1, TMA4220: September 2, 2015Document5 paginiSolutions To Exercise Set 1, TMA4220: September 2, 2015Salomon HagenimanaÎncă nu există evaluări
- Calculation Methods For Two-Dimensional Groundwater Flow: P. Van Der VeerDocument173 paginiCalculation Methods For Two-Dimensional Groundwater Flow: P. Van Der VeerJavier alvaroÎncă nu există evaluări