S-ar putea să vă placă și
- Technologies For Future Precision Strike Missile Systems - Missile/Aircraft IntegrationDocument18 paginiTechnologies For Future Precision Strike Missile Systems - Missile/Aircraft IntegrationMohammad Reza MadadiÎncă nu există evaluări
- H 1 T P A: Andling Ense Eaflet WIN Iston EroplanesDocument8 paginiH 1 T P A: Andling Ense Eaflet WIN Iston Eroplanesroyalairmaroc737Încă nu există evaluări
- Aircraft Instruments: Airspeed Indicator (Cont)Document17 paginiAircraft Instruments: Airspeed Indicator (Cont)ndprajapatiÎncă nu există evaluări
- SDBNDIAIntlA-GSymposiumFinal ForNDIADropboxDocument14 paginiSDBNDIAIntlA-GSymposiumFinal ForNDIADropboxamenendezamÎncă nu există evaluări
- Air Clues 1Document25 paginiAir Clues 1Jon LakeÎncă nu există evaluări
- Limitations of Guns As A Defence AgainstDocument56 paginiLimitations of Guns As A Defence Againsteje701Încă nu există evaluări
- Aerodynamics of An Unmanned Aerial VehicleDocument159 paginiAerodynamics of An Unmanned Aerial VehicleKarthik Keyan KÎncă nu există evaluări
- Methods of Radar Cross-section AnalysisDe la EverandMethods of Radar Cross-section AnalysisJ.W. Jr. CrispinÎncă nu există evaluări
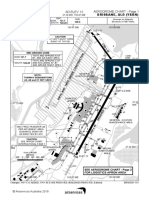
- Brisbane (YBBN) PDFDocument53 paginiBrisbane (YBBN) PDFBayu ChandraÎncă nu există evaluări
- Reducing Wave DragDocument43 paginiReducing Wave DragJaredSagagaÎncă nu există evaluări
- Airplane Performance Range and EnduranceDocument45 paginiAirplane Performance Range and Endurancearun2386Încă nu există evaluări
- Seeker/Sensor Technology Assessment For ECAP: Presented by Tim CarrollDocument18 paginiSeeker/Sensor Technology Assessment For ECAP: Presented by Tim CarrollWaqas Ahmed100% (2)
- Vrabac UAVDocument22 paginiVrabac UAVSandica DragosÎncă nu există evaluări
- Unmanned Aircraft SystemsDe la EverandUnmanned Aircraft SystemsElla AtkinsÎncă nu există evaluări
- 1 - Elrich Raven Introduction PresentationDocument22 pagini1 - Elrich Raven Introduction PresentationTory ElrichÎncă nu există evaluări
- Aircraft Control Surfaces CalculationDocument16 paginiAircraft Control Surfaces Calculationlove2me20040% (1)
- 14 01954MertMuameleciRapportDocument72 pagini14 01954MertMuameleciRapportandredurvalandradeÎncă nu există evaluări
- Convoy ProtectionDocument10 paginiConvoy ProtectionUAVs Australia100% (1)
- TACP-1008a Rockets GunsDocument32 paginiTACP-1008a Rockets GunsCharles Cousineau100% (1)
- Military Low-Level Flying From F-4 Phantom to F-35 Lightning II: A Pictorial Display of Low Flying in Cumbria and BeyondDe la EverandMilitary Low-Level Flying From F-4 Phantom to F-35 Lightning II: A Pictorial Display of Low Flying in Cumbria and BeyondÎncă nu există evaluări
- Optimization: of Joined-Wing AircraftDocument10 paginiOptimization: of Joined-Wing AircraftSagar KulkarniÎncă nu există evaluări
- Design of A Biplane Wing For Small-Scale Aircraft: The Pennsylvania State University, University Park, PA, 16802Document10 paginiDesign of A Biplane Wing For Small-Scale Aircraft: The Pennsylvania State University, University Park, PA, 16802Anonymous qTKCWlxÎncă nu există evaluări
- Preliminary Design and Development of Small Class UAV For Testing of Different Payloads and SensorsDocument6 paginiPreliminary Design and Development of Small Class UAV For Testing of Different Payloads and SensorsAlg PRasadÎncă nu există evaluări
- Lecture 7Document12 paginiLecture 7artist-bossÎncă nu există evaluări
- RPG&RSHGDocument1 paginăRPG&RSHGprofesorkoleÎncă nu există evaluări
- Module 1: Lecture 1 What Is Guidance?Document10 paginiModule 1: Lecture 1 What Is Guidance?anchalÎncă nu există evaluări
- Strela: Launch Vehicle User ManualDocument63 paginiStrela: Launch Vehicle User ManualbospankerÎncă nu există evaluări
- A To Z Guide To Afghanistan Assistance 2012Document365 paginiA To Z Guide To Afghanistan Assistance 2012Sayed Sharif HashimiÎncă nu există evaluări
- Practical Aspects of Kalman Filtering ImplementationDocument187 paginiPractical Aspects of Kalman Filtering Implementationsdgpass2585Încă nu există evaluări
- Energy-Maneuverability MethodsDocument5 paginiEnergy-Maneuverability Methodsaleemsalman55Încă nu există evaluări
- A Technique To Determine Lift and Drag Polars in FlightDocument7 paginiA Technique To Determine Lift and Drag Polars in Flightmykingboody2156Încă nu există evaluări
- Airspeed Indicator - Wikipedia, The Free EncyclopediaDocument6 paginiAirspeed Indicator - Wikipedia, The Free EncyclopediaAnand TRÎncă nu există evaluări
- Guided MissileDocument13 paginiGuided MissileAnurag RanaÎncă nu există evaluări
- DCS JF-17 - Normal ProceduresDocument17 paginiDCS JF-17 - Normal ProceduresJamoc0Încă nu există evaluări
- Flight Testing Methodology andDocument6 paginiFlight Testing Methodology andSerdar BilgeÎncă nu există evaluări
- Preliminary Design of Supersonic FighterDocument28 paginiPreliminary Design of Supersonic FighterSarangÎncă nu există evaluări
- Instrumentation For Flight TestingDocument17 paginiInstrumentation For Flight TestingNambi RajanÎncă nu există evaluări
- DesignDocument9 paginiDesignSamx80Încă nu există evaluări
- Flight Test Techniques For Active Electronically Scanned Array RadarsDocument12 paginiFlight Test Techniques For Active Electronically Scanned Array RadarsAnonymous zbJUHjc3Încă nu există evaluări
- Barry M Goldwater Range West MALDocument1 paginăBarry M Goldwater Range West MALKyle FaginÎncă nu există evaluări
- Notable Achievements in AviationDocument122 paginiNotable Achievements in AviationYuryÎncă nu există evaluări
- Performance-Energy Excess PowerDocument53 paginiPerformance-Energy Excess PowerÇalanyalıoğluÎncă nu există evaluări
- Flying Qualities (Princeton MAE331 Lecture17)Document11 paginiFlying Qualities (Princeton MAE331 Lecture17)eeebbbuuuÎncă nu există evaluări
- FS2004 - The Aircraft - CFG FileDocument5 paginiFS2004 - The Aircraft - CFG FiletumbÎncă nu există evaluări
- Flight Test #2 ReportDocument38 paginiFlight Test #2 ReportBsharrellÎncă nu există evaluări
- 10 StructuresDocument22 pagini10 Structureskarthip08Încă nu există evaluări
- Adp Fighter AircraftDocument35 paginiAdp Fighter Aircraftiyyappan rockÎncă nu există evaluări
- A-10C - AAT06 Mission DataDocument7 paginiA-10C - AAT06 Mission DataUppotappÎncă nu există evaluări
- Introduction To Flight Test Engineering: Dan HrehovDocument30 paginiIntroduction To Flight Test Engineering: Dan HrehovmsrajuÎncă nu există evaluări
- Micro Air Vehicles Seminar1Document33 paginiMicro Air Vehicles Seminar1deepubs89Încă nu există evaluări
- Multirole Fighter Aircraft ADP PDFDocument72 paginiMultirole Fighter Aircraft ADP PDFBala MuruganÎncă nu există evaluări
- 2009 UAV Project DescriptionDocument2 pagini2009 UAV Project Descriptionjohnyb111Încă nu există evaluări
- Introduction To Aerial Vehicle Flight Mechanics, Stability and Control - CranfieldDocument14 paginiIntroduction To Aerial Vehicle Flight Mechanics, Stability and Control - Cranfielddaus100% (1)
- Annular Wing CraftDocument2 paginiAnnular Wing CraftCalvin NgÎncă nu există evaluări
- Aerodynamics and Theory of Flight, Forces of Flight, Lift, Weight, Thrust, DragDocument14 paginiAerodynamics and Theory of Flight, Forces of Flight, Lift, Weight, Thrust, DragMohammad ChessterÎncă nu există evaluări
- Some Flight Characteristics of A Deflected Slipstream V-Stol Aircraft 19630008786 - 1963008786 PDFDocument38 paginiSome Flight Characteristics of A Deflected Slipstream V-Stol Aircraft 19630008786 - 1963008786 PDFSergiy_KirÎncă nu există evaluări
- Autopilot HistoryDocument20 paginiAutopilot HistoryKamesh PrasadÎncă nu există evaluări
- CFD NoteDocument48 paginiCFD NoteAli YıldırımÎncă nu există evaluări
- Numerical Method For Linear AlgebraDocument16 paginiNumerical Method For Linear AlgebraAshwini Kumar PalÎncă nu există evaluări
- Discretization of Convection - Diffusion Type Equation: 10 Indo - German Winter Academy 2011Document50 paginiDiscretization of Convection - Diffusion Type Equation: 10 Indo - German Winter Academy 2011Gaurav KulkarniÎncă nu există evaluări
- Navier StokesDocument36 paginiNavier StokesSoumi RoyÎncă nu există evaluări
- Gmres SiamDocument14 paginiGmres SiamKien NguyenÎncă nu există evaluări
- Jacobian-Free Newton-Krylov Methods Issues and SolutionsDocument6 paginiJacobian-Free Newton-Krylov Methods Issues and SolutionsAli YıldırımÎncă nu există evaluări
- Aerodynamic Design Sensitivities On An Unstructured Mesh Using The Navier-Stokes Equations and A Discrete Adjoint Formulation PDFDocument119 paginiAerodynamic Design Sensitivities On An Unstructured Mesh Using The Navier-Stokes Equations and A Discrete Adjoint Formulation PDFAli YıldırımÎncă nu există evaluări
- Recent Computational Developments in Krylov Subspace Methods For Linear SystemsDocument59 paginiRecent Computational Developments in Krylov Subspace Methods For Linear SystemsAli YıldırımÎncă nu există evaluări
- Aiaa 2009 4140 PDFDocument26 paginiAiaa 2009 4140 PDFAli YıldırımÎncă nu există evaluări
- Comparison of SplittingDocument21 paginiComparison of SplittingAli YıldırımÎncă nu există evaluări
- 2008 - Filkovic - Graduate Work - 3D Panel MethodDocument70 pagini2008 - Filkovic - Graduate Work - 3D Panel MethodMatej AndrejašičÎncă nu există evaluări
- AE451 - Aeronautical Engineering DesignDocument60 paginiAE451 - Aeronautical Engineering DesignAli YıldırımÎncă nu există evaluări
- Theory of Wing SectionsDocument544 paginiTheory of Wing SectionsAli YıldırımÎncă nu există evaluări
- AAA33 ManualDocument202 paginiAAA33 ManualAli YıldırımÎncă nu există evaluări