S-ar putea să vă placă și
- Linear Algebra Cheat SheetDocument2 paginiLinear Algebra Cheat SheettraponegroÎncă nu există evaluări
- Em-4 Mini Project Linear TransformationsDocument27 paginiEm-4 Mini Project Linear TransformationsGautamkrishna ChintaÎncă nu există evaluări
- Linear TransDocument83 paginiLinear TransNandu100% (1)
- ENGR 2422 Engineering Mathematics 2 Brief Notes On Chapter 1 1.1 Lines and PlanesDocument10 paginiENGR 2422 Engineering Mathematics 2 Brief Notes On Chapter 1 1.1 Lines and PlanesbihanbaÎncă nu există evaluări
- 12 091220171111Document1 pagină12 091220171111Jack LupinoÎncă nu există evaluări
- 12 091220171111.mergedDocument4 pagini12 091220171111.mergedJack LupinoÎncă nu există evaluări
- DR Sailaja U - PhysicsDocument78 paginiDR Sailaja U - PhysicsYocobSamandrewsÎncă nu există evaluări
- Linear - Transformation by RSDocument84 paginiLinear - Transformation by RSSam ShekhawatÎncă nu există evaluări
- Curvilinear Motion N-TDocument16 paginiCurvilinear Motion N-TFaiselÎncă nu există evaluări
- KinematikaDocument4 paginiKinematikaPuji LestariÎncă nu există evaluări
- Physics Homework 0-4: Name: Graciella Fabiona Turangan (菲奥娜) STUDENT ID: 10460348771 Major: Mechanical EngineeringDocument3 paginiPhysics Homework 0-4: Name: Graciella Fabiona Turangan (菲奥娜) STUDENT ID: 10460348771 Major: Mechanical Engineeringrifky shawnÎncă nu există evaluări
- Physics Lec 04 2D MotionDocument17 paginiPhysics Lec 04 2D MotionAnthony Wijaya, S.Pd., M.Si.Încă nu există evaluări
- LT3 Solving Differential EquationsDocument4 paginiLT3 Solving Differential Equationssujayan2005Încă nu există evaluări
- 03 - Rotational Motion - Theory & Example Module-2Document32 pagini03 - Rotational Motion - Theory & Example Module-2Raju SinghÎncă nu există evaluări
- Linear TransformationDocument40 paginiLinear Transformationthuannm0426Încă nu există evaluări
- Country's Best Online Test PlatformDocument74 paginiCountry's Best Online Test PlatformSubhrasankar RaychaudhuryÎncă nu există evaluări
- Tensor Algebra Linear Transformations: August 2019Document21 paginiTensor Algebra Linear Transformations: August 2019antonio oliveiraÎncă nu există evaluări
- Clase Lugar Geometrico de Las Raices IDocument32 paginiClase Lugar Geometrico de Las Raices IJesus Tapia GallardoÎncă nu există evaluări
- 217 Determinant Are A 2017Document2 pagini217 Determinant Are A 2017rojit laiÎncă nu există evaluări
- Five II A AllproofsDocument16 paginiFive II A AllproofsRonald PerezÎncă nu există evaluări
- UKMT - IMOK - Hamilton - Intermediate Mathematical Olympiad and Kangaroo 2014 - SolutionsDocument6 paginiUKMT - IMOK - Hamilton - Intermediate Mathematical Olympiad and Kangaroo 2014 - SolutionsArsh TewariÎncă nu există evaluări
- Lecture-11 - 14-11-22Document31 paginiLecture-11 - 14-11-22Alkit SharmaÎncă nu există evaluări
- 18mat31 NotesDocument90 pagini18mat31 NotesABHI YRSÎncă nu există evaluări
- Kinematics of A Particle: by Dr. Toh Hoong ThiamDocument30 paginiKinematics of A Particle: by Dr. Toh Hoong Thiamnadia syahiraÎncă nu există evaluări
- Paper 2 With Solution PhysicsDocument15 paginiPaper 2 With Solution PhysicsKushagraÎncă nu există evaluări
- Orbital Magnetic Moment of An AtomDocument10 paginiOrbital Magnetic Moment of An Atomrohitau88Încă nu există evaluări
- A3 - Intro To FEM3 - Truss - MainDocument87 paginiA3 - Intro To FEM3 - Truss - MainNiño Cochise SarcenoÎncă nu există evaluări
- Week #6: Laplace Transforms - IntroductionDocument31 paginiWeek #6: Laplace Transforms - IntroductionAbasi IbrahimÎncă nu există evaluări
- Physics Notes 2Document21 paginiPhysics Notes 2Sanjeet KotaryaÎncă nu există evaluări
- Microwave Engg Passive DevicesDocument54 paginiMicrowave Engg Passive DevicesBibek BoxiÎncă nu există evaluări
- Te, TM, TemDocument144 paginiTe, TM, Temkiprotich allanÎncă nu există evaluări
- Advanced Engineering Mathematics: Laplace TransformDocument20 paginiAdvanced Engineering Mathematics: Laplace TransformAndenet AshagrieÎncă nu există evaluări
- Unit - 3 - Laplace Tarnsform and Transient AnalysisDocument83 paginiUnit - 3 - Laplace Tarnsform and Transient AnalysisJoseph AgboglaÎncă nu există evaluări
- Slopes and LinesDocument46 paginiSlopes and LinesbalingbinglorieanneÎncă nu există evaluări
- JEE Main 2019 Question Paper With Solutions (12th April - Evening)Document73 paginiJEE Main 2019 Question Paper With Solutions (12th April - Evening)Sionna KatiyarÎncă nu există evaluări
- Sma3013 Linear Algebra SEMESTER 1 2020/2021Document52 paginiSma3013 Linear Algebra SEMESTER 1 2020/2021Ab BÎncă nu există evaluări
- Laplace Circuit AnalysisDocument41 paginiLaplace Circuit AnalysishibaÎncă nu există evaluări
- ME101 Lecture24 KD PDFDocument21 paginiME101 Lecture24 KD PDFMary EuniceÎncă nu există evaluări
- JEE Main Sample Paper-1Document44 paginiJEE Main Sample Paper-1Nandana ManikandanÎncă nu există evaluări
- Conformal Transformations: Neil Marks, DLS/CCLRC, Daresbury Laboratory, Warrington WA4 4AD, U.KDocument18 paginiConformal Transformations: Neil Marks, DLS/CCLRC, Daresbury Laboratory, Warrington WA4 4AD, U.KAnkur KulshresthaÎncă nu există evaluări
- 2.1 Complex Maths and Laplace Transform ReviewDocument31 pagini2.1 Complex Maths and Laplace Transform ReviewDawa PenjorÎncă nu există evaluări
- Solving IVP With Laplace TransformsDocument22 paginiSolving IVP With Laplace TransformslobarbiojeassÎncă nu există evaluări
- Pivot TRDocument16 paginiPivot TRpipul36Încă nu există evaluări
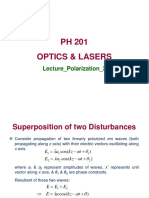
- PH 201 Optics & Lasers: Lecture - Polarization - 2Document15 paginiPH 201 Optics & Lasers: Lecture - Polarization - 2Selvi RÎncă nu există evaluări
- Linch6 Linear Transformation.Document34 paginiLinch6 Linear Transformation.Agung ManaluÎncă nu există evaluări
- Chapter 1 Physical Quantities and Units Checked PDFDocument6 paginiChapter 1 Physical Quantities and Units Checked PDFmerryÎncă nu există evaluări
- Rotatory MotionDocument55 paginiRotatory MotionstudyingwithjuhiÎncă nu există evaluări
- Lec 2-5 Rectilinear and Angular MotionDocument34 paginiLec 2-5 Rectilinear and Angular MotionSaqib SherÎncă nu există evaluări
- Laplace Transform OdeDocument24 paginiLaplace Transform OdeUmer KhanÎncă nu există evaluări
- Atoms AssignmentDocument19 paginiAtoms AssignmentStephenÎncă nu există evaluări
- Chapter05 Circular Motion SDocument9 paginiChapter05 Circular Motion SeltytanÎncă nu există evaluări
- Answer Scheme Test 1 MechanicsDocument10 paginiAnswer Scheme Test 1 MechanicsJayashiryMorganÎncă nu există evaluări
- Mechanics Units 1 and 2 BookletDocument122 paginiMechanics Units 1 and 2 BookletDavid100% (1)
- Engineering Mechanics II (Dynamics) (MEng1042. CH 2Document89 paginiEngineering Mechanics II (Dynamics) (MEng1042. CH 2Agare TubeÎncă nu există evaluări
- Aakash Home Assignment 7Document17 paginiAakash Home Assignment 7Pranav KapadiaÎncă nu există evaluări
- Physics Topic 3 Work Energy 28 Jan 2022Document55 paginiPhysics Topic 3 Work Energy 28 Jan 2022Benjamin Juanillo IIIÎncă nu există evaluări
- Slides IIIDocument159 paginiSlides IIIHimanshuÎncă nu există evaluări
- 1 CirclesDocument12 pagini1 CirclesjackieshanthekingÎncă nu există evaluări
- Circular Motion: 4.1b Further MechanicsDocument38 paginiCircular Motion: 4.1b Further MechanicsJeffreyÎncă nu există evaluări
- Linear Algebra Lect 1Document16 paginiLinear Algebra Lect 1SuzanÎncă nu există evaluări
- Multilinear Functions Of Direction And Their Uses In Differential GeometryDe la EverandMultilinear Functions Of Direction And Their Uses In Differential GeometryÎncă nu există evaluări
- Ias 18Document11 paginiIas 18user31415Încă nu există evaluări
- Ifrs Ias UpdateDocument4 paginiIfrs Ias Updateuser31415Încă nu există evaluări
- F10Document36 paginiF10user31415Încă nu există evaluări
- Student Academic Learning Services: Accounting: Debits & CreditsDocument11 paginiStudent Academic Learning Services: Accounting: Debits & Creditsuser31415Încă nu există evaluări
- Accounting Manual Federal Reserve BanksDocument222 paginiAccounting Manual Federal Reserve Banksuser31415Încă nu există evaluări
- When To Debit and Credit in AccountingDocument8 paginiWhen To Debit and Credit in Accountinguser31415Încă nu există evaluări
- Chapter 9: Introduction To The T StatisticDocument8 paginiChapter 9: Introduction To The T Statisticuser31415Încă nu există evaluări
- 08 Vector SubspacesDocument8 pagini08 Vector Subspacesuser31415Încă nu există evaluări
- Sufficient Statistics and Exponential FamilyDocument11 paginiSufficient Statistics and Exponential Familyuser31415Încă nu există evaluări
- 36 Spectral Decomposition and ImageDocument8 pagini36 Spectral Decomposition and Imageuser31415Încă nu există evaluări
- Chapter 3 PDFDocument39 paginiChapter 3 PDFVivek KumarÎncă nu există evaluări
- Solution of Linear Programming Problems With MatlabDocument3 paginiSolution of Linear Programming Problems With MatlabMahfuzulhoq ChowdhuryÎncă nu există evaluări
- Matlab ProgramDocument15 paginiMatlab ProgramnurmayulinaÎncă nu există evaluări
- Matrix Appendix (Katsuhiko Ogata) System Dynamics (4th Edition)Document15 paginiMatrix Appendix (Katsuhiko Ogata) System Dynamics (4th Edition)TracerLifeÎncă nu există evaluări
- Matrices: Table of Contents For MatricesDocument7 paginiMatrices: Table of Contents For MatricesTinkudhar prusethÎncă nu există evaluări
- Linear Algebra and Feature Selection - Course NotesDocument49 paginiLinear Algebra and Feature Selection - Course NotesHelen MylonaÎncă nu există evaluări
- Matrix AlgebraDocument87 paginiMatrix AlgebraRhythm NafiÎncă nu există evaluări
- MATHS MaticesDocument26 paginiMATHS Maticesvarma krishnaÎncă nu există evaluări
- Institute: Matrices Home Work 2Document3 paginiInstitute: Matrices Home Work 2Uday BhartiyaÎncă nu există evaluări
- Gallopoulos - Parallelism in Matrix ComputationsDocument505 paginiGallopoulos - Parallelism in Matrix ComputationsThermionÎncă nu există evaluări
- 3D Geometry in Geogebra - A Single VectorDocument6 pagini3D Geometry in Geogebra - A Single VectorMuhammad NazrinÎncă nu există evaluări
- Iitjee MathsDocument78 paginiIitjee MathsSanjay GuptaÎncă nu există evaluări
- LinearGames Matrix LabyrinthDocument2 paginiLinearGames Matrix LabyrinthVridhi AroraÎncă nu există evaluări
- Tutorial Sheet - 1 (Linear Algebra) PDFDocument2 paginiTutorial Sheet - 1 (Linear Algebra) PDFSushma VermaÎncă nu există evaluări
- ENTREGA - ESTOCASTICA Entrega 3Document43 paginiENTREGA - ESTOCASTICA Entrega 3Carlos Andrés Pérez Estrada100% (1)
- RPRTDocument9 paginiRPRTAshish PaudelÎncă nu există evaluări
- Engineering Statistics and Linear Algebra by Vijayashri V. B.Document128 paginiEngineering Statistics and Linear Algebra by Vijayashri V. B.1MV19EC072Nikita S Pai100% (1)
- Tutorial 1: Universiti Tunku Abdul RahmanDocument4 paginiTutorial 1: Universiti Tunku Abdul RahmanfreeloadÎncă nu există evaluări
- QP Code: 23105591Document4 paginiQP Code: 23105591aui207auiÎncă nu există evaluări
- Matrices DPP 2Document2 paginiMatrices DPP 2Saurav RaghavÎncă nu există evaluări
- Appendix Matrix Introduction: A.1 BasicsDocument10 paginiAppendix Matrix Introduction: A.1 BasicsaprilswapnilÎncă nu există evaluări
- Mata23 Final 2012sDocument15 paginiMata23 Final 2012sexamkillerÎncă nu există evaluări
- Midterm ExamDocument2 paginiMidterm ExamLê Thiên Hiền TrangÎncă nu există evaluări
- Matrices and Determinant - DPP 06 - (Kautilya)Document6 paginiMatrices and Determinant - DPP 06 - (Kautilya)Ameya PandeyÎncă nu există evaluări
- ES272 ch4bDocument18 paginiES272 ch4btarafe5509Încă nu există evaluări
- Linear Algebra ModuleDocument38 paginiLinear Algebra ModulekifuyeÎncă nu există evaluări
- Maths Manit Sec 2 Complete NotesDocument138 paginiMaths Manit Sec 2 Complete Notesdebu526mahanusÎncă nu există evaluări
- Determinants: Intext Exercise: 1Document30 paginiDeterminants: Intext Exercise: 1Remaining TechÎncă nu există evaluări
- Exercises On Applied Linear Algebra: 1 Systems of Linear Equations and MatricesDocument13 paginiExercises On Applied Linear Algebra: 1 Systems of Linear Equations and MatricesNhi PhamHuynh ThaoÎncă nu există evaluări