S-ar putea să vă placă și
- 312 BDocument2 pagini312 BДрагиша Небитни Трифуновић50% (2)
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10De la EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10Încă nu există evaluări
- Kirloskar KG645 - User Manual For Genset Controller PDFDocument123 paginiKirloskar KG645 - User Manual For Genset Controller PDFsandsrd Rd87% (63)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsDe la EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsEvaluare: 4 din 5 stele4/5 (5)
- 2P36784, Plug ValveDocument34 pagini2P36784, Plug ValveEdwin HernandezÎncă nu există evaluări
- McCormick T-MAX Product Guide ManualDocument58 paginiMcCormick T-MAX Product Guide Manuallbt Braakman100% (1)
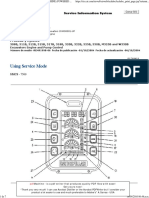
- Operacion Modulo y Codigos de FallaDocument21 paginiOperacion Modulo y Codigos de FallaJimmyJavierTorresSalas100% (1)
- Zhang Et Al. - 2014 - Continuation-Based Pull-In and Lift-Off SimulationDocument10 paginiZhang Et Al. - 2014 - Continuation-Based Pull-In and Lift-Off SimulationAÎncă nu există evaluări
- Semlyen 9842 2834Document9 paginiSemlyen 9842 2834Isai SantanaÎncă nu există evaluări
- 1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsDocument9 pagini1.cascaded Two-Level Inverter-Based Multilevel STATCOM For High-Power ApplicationsSivareddy MudiyalaÎncă nu există evaluări
- Chithra ConferenceDocument6 paginiChithra Conferencem.rathi meenaÎncă nu există evaluări
- A Feedback Linearizing Control Scheme For ADocument8 paginiA Feedback Linearizing Control Scheme For AFatih BurakÎncă nu există evaluări
- Robust Control of Servo DC Motor: LMI Approach: Petru DOBRA, Gheorghe LAZEA, Daniel MOGA and Mirela TRUŞCĂDocument6 paginiRobust Control of Servo DC Motor: LMI Approach: Petru DOBRA, Gheorghe LAZEA, Daniel MOGA and Mirela TRUŞCĂyuli maulizaÎncă nu există evaluări
- New Criteria For Voltage Stability Evaluation in Interconnected Power SystemDocument6 paginiNew Criteria For Voltage Stability Evaluation in Interconnected Power SystemAnkit BhattÎncă nu există evaluări
- Ts Boost ConverterDocument6 paginiTs Boost Converterala houamÎncă nu există evaluări
- Article CIREI'2019Document9 paginiArticle CIREI'2019Krimo de SaidaÎncă nu există evaluări
- IET Generation Trans Dist - 2022 - Hu - Reactive Power Compensation Method in Modern Power System Facing EnergyDocument11 paginiIET Generation Trans Dist - 2022 - Hu - Reactive Power Compensation Method in Modern Power System Facing EnergyDungÎncă nu există evaluări
- Step by Step Ieee AWESOMEDocument6 paginiStep by Step Ieee AWESOMESimon Pedro Aguilar RiosÎncă nu există evaluări
- The Effect of SVC-FACTS Controller On Power System Oscillation Damping ControlDocument5 paginiThe Effect of SVC-FACTS Controller On Power System Oscillation Damping ControlKamran KhanÎncă nu există evaluări
- Applying To Control Overcurrents at Unbalanced Faults of Forced-Commutated Vscs Used As Static Var CompensatorsDocument6 paginiApplying To Control Overcurrents at Unbalanced Faults of Forced-Commutated Vscs Used As Static Var CompensatorsJULFANRI SIRAITÎncă nu există evaluări
- Marchesoni1992 PDFDocument16 paginiMarchesoni1992 PDFNazmul IslamÎncă nu există evaluări
- A Harmonic Detection For Grid Connected PV Systems Under Non Linear Load Using Cuk ConverterDocument4 paginiA Harmonic Detection For Grid Connected PV Systems Under Non Linear Load Using Cuk ConverterArivumaniÎncă nu există evaluări
- Slidin Mode Research PaperDocument33 paginiSlidin Mode Research PaperAnimesh JainÎncă nu există evaluări
- 1 s2.0 S0142061517318483 MainDocument11 pagini1 s2.0 S0142061517318483 Mainenta elektroÎncă nu există evaluări
- Self-Tuning Fuzzy PI Dc-Bus Voltage Controller and Fuzzy Switching Sequences Selection For Direct Power Control of PWM AC/DC ConverterDocument6 paginiSelf-Tuning Fuzzy PI Dc-Bus Voltage Controller and Fuzzy Switching Sequences Selection For Direct Power Control of PWM AC/DC ConverterZikra ElninoÎncă nu există evaluări
- On The Stability of Volts-per-Hertz Control For Induction MotorsDocument10 paginiOn The Stability of Volts-per-Hertz Control For Induction Motorsm tpÎncă nu există evaluări
- Torsional PssDocument6 paginiTorsional PssPablo RubenÎncă nu există evaluări
- Online Identification of PMSM Parameters: Parameter Identifiability and Estimator Comparative StudyDocument14 paginiOnline Identification of PMSM Parameters: Parameter Identifiability and Estimator Comparative StudyDahnoun IlyasÎncă nu există evaluări
- Ieee 9Document8 paginiIeee 9Rupesh SushirÎncă nu există evaluări
- Comparative Study of Different Control Strategies For DstatcomDocument7 paginiComparative Study of Different Control Strategies For DstatcomAmmuRaÎncă nu există evaluări
- Adaptive Sliding Mode Control Method For DC-DC ConvertersDocument10 paginiAdaptive Sliding Mode Control Method For DC-DC ConvertersTran Cuong HungÎncă nu există evaluări
- Lightning Impulse Voltage Distribution Over Power TransformerDocument3 paginiLightning Impulse Voltage Distribution Over Power Transformerbechir mettaliÎncă nu există evaluări
- Implementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRDocument14 paginiImplementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRRamphani NunnaÎncă nu există evaluări
- 5 106-6 PDFDocument6 pagini5 106-6 PDFCeh DjamelÎncă nu există evaluări
- ACDC Flyback Converter With A Single SwitchDocument6 paginiACDC Flyback Converter With A Single SwitchJAY S TANDELÎncă nu există evaluări
- Hybrid Control of The Boost Converter - Robust Global Stabilization - T. Theunisse Et Al. - Conference Paper (2013)Document6 paginiHybrid Control of The Boost Converter - Robust Global Stabilization - T. Theunisse Et Al. - Conference Paper (2013)Aaron CrucesÎncă nu există evaluări
- A Current Index Approach To Compensate Commutation Phase Error For Sensorless Brushless DC Motors With Nonideal Back EMFDocument11 paginiA Current Index Approach To Compensate Commutation Phase Error For Sensorless Brushless DC Motors With Nonideal Back EMFSUMAN PAULÎncă nu există evaluări
- Velocity Control of A PMSM Fed by An Inverter-DCDCDocument13 paginiVelocity Control of A PMSM Fed by An Inverter-DCDCAndreea IlieÎncă nu există evaluări
- Pub 9 Implementation of Grid-Connected Photovoltaic System With Power Factor Control and Islanding DetectionDocument4 paginiPub 9 Implementation of Grid-Connected Photovoltaic System With Power Factor Control and Islanding Detectionatam azerÎncă nu există evaluări
- Effects of Tap Changing Transformer and Shunt Capacitor On Voltage Stability Enhancement of Transmission NetworksDocument4 paginiEffects of Tap Changing Transformer and Shunt Capacitor On Voltage Stability Enhancement of Transmission NetworksbogdanÎncă nu există evaluări
- Veas 1994Document7 paginiVeas 1994martin.teruelÎncă nu există evaluări
- Pole-Placement Designs of Power System StabilizersDocument7 paginiPole-Placement Designs of Power System StabilizersabelcatayÎncă nu există evaluări
- Comparison of Universal Circuit Breaker Arc Representation With EMTP Built-In ModelDocument6 paginiComparison of Universal Circuit Breaker Arc Representation With EMTP Built-In ModelBalajiÎncă nu există evaluări
- Matrix Converter Modulation Strategies: A New General Approach Based On Space-Vector Representation of The Switch StateDocument1 paginăMatrix Converter Modulation Strategies: A New General Approach Based On Space-Vector Representation of The Switch StatevainateyagoldarÎncă nu există evaluări
- SC Modeling PDFDocument8 paginiSC Modeling PDFahmedÎncă nu există evaluări
- Design of BLDC Motor Control in Regenerative BrakingDocument5 paginiDesign of BLDC Motor Control in Regenerative BrakingBT20MEC120 Jyoti ThakurÎncă nu există evaluări
- Critical Eigenvalue Trajectory TracingDocument7 paginiCritical Eigenvalue Trajectory TracingLuis MuñozÎncă nu există evaluări
- The Continuation Power Flow A Tool For Steady State Voltage Stability AnalysisDocument8 paginiThe Continuation Power Flow A Tool For Steady State Voltage Stability AnalysisProsen DeyÎncă nu există evaluări
- Control Strategy Based On Double Coordinates For Three-Phase Grid-Connected InvertersDocument5 paginiControl Strategy Based On Double Coordinates For Three-Phase Grid-Connected InvertersjogeshÎncă nu există evaluări
- A Novel Dynamic Voltage Restorer Based On Matrix ConvertersDocument7 paginiA Novel Dynamic Voltage Restorer Based On Matrix ConvertersAbdulwahid Al-safanyÎncă nu există evaluări
- A D-Q Synchronous Frame Controller For Single Phase InverterDocument7 paginiA D-Q Synchronous Frame Controller For Single Phase InvertershanÎncă nu există evaluări
- Ieee Vol. 11, No. 4, 1996: The Bus. EmtpDocument9 paginiIeee Vol. 11, No. 4, 1996: The Bus. EmtpthavaselvanÎncă nu există evaluări
- Adaptive Voltage Regulation of PWM Buck DC-DC Converters Using Backstepping Sliding Mode ControlDocument6 paginiAdaptive Voltage Regulation of PWM Buck DC-DC Converters Using Backstepping Sliding Mode ControlAbdelmalik BendaikhaÎncă nu există evaluări
- 1 s2.0 S1474667017345627 MainDocument4 pagini1 s2.0 S1474667017345627 MainArif KhattakÎncă nu există evaluări
- 1995 & 1996 Paper On A Multilevel Voltage-Source Inverter With Separate DC Sources For Static VAr GenerationDocument9 pagini1995 & 1996 Paper On A Multilevel Voltage-Source Inverter With Separate DC Sources For Static VAr GenerationfangzpengÎncă nu există evaluări
- A Novel Bidirectional T-Type Multilevel Inverter For Electric Vehicle ApplicationsDocument11 paginiA Novel Bidirectional T-Type Multilevel Inverter For Electric Vehicle Applicationsfarid kerroucheÎncă nu există evaluări
- Generalized Discontinuous DC-link Balancing Modulation Strategy For Three-Level InvertersDocument8 paginiGeneralized Discontinuous DC-link Balancing Modulation Strategy For Three-Level Invertersmeistehaft270Încă nu există evaluări
- PFC Small SignalDocument14 paginiPFC Small SignalMeral MeralÎncă nu există evaluări
- A Fuzzy Based Power Quality Enhancement Strategy For Ac-Ac ConvertersDocument6 paginiA Fuzzy Based Power Quality Enhancement Strategy For Ac-Ac Converterskottee1977Încă nu există evaluări
- Steady-State Analysis of Self-Excited Induction Generator Using Real and Reactive Power BalancesDocument4 paginiSteady-State Analysis of Self-Excited Induction Generator Using Real and Reactive Power Balancespk251094Încă nu există evaluări
- Clase 04Document9 paginiClase 04Mauricio LeañoÎncă nu există evaluări
- Chen 2012Document11 paginiChen 2012Dulal MannaÎncă nu există evaluări
- Comparative Study of Five Level and SeveDocument12 paginiComparative Study of Five Level and Sevemahmoud yarahmadiÎncă nu există evaluări
- Grid Tie Indirect Matrix Converter Operating With Unity Power Factor Under Double Space Vector ModulationDocument6 paginiGrid Tie Indirect Matrix Converter Operating With Unity Power Factor Under Double Space Vector ModulationGamarJanuzajÎncă nu există evaluări
- Smart System For Internet of Things Final 100313DLDocument32 paginiSmart System For Internet of Things Final 100313DLdenghueiÎncă nu există evaluări
- Marc Osajda 100313DLDocument16 paginiMarc Osajda 100313DLdenghueiÎncă nu există evaluări
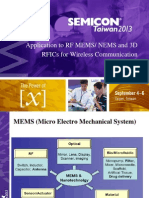
- An Emerging Dimension of Internet-of-Things System - Chemical MEMS SensorsDocument22 paginiAn Emerging Dimension of Internet-of-Things System - Chemical MEMS SensorsdenghueiÎncă nu există evaluări
- Trends in Wafer Bonding For High Volume Consumer MEMS ApplicationsDocument34 paginiTrends in Wafer Bonding For High Volume Consumer MEMS ApplicationsdenghueiÎncă nu există evaluări
- Lai Wen Zheng 100313DLDocument19 paginiLai Wen Zheng 100313DLdenghueiÎncă nu există evaluări
- 1663 July 2013 - 081413DLDocument28 pagini1663 July 2013 - 081413DLdenghueiÎncă nu există evaluări
- Photonicsspectra201307 DLDocument76 paginiPhotonicsspectra201307 DLdenghueiÎncă nu există evaluări
- Academy Sharing Knowledge: InsideDocument48 paginiAcademy Sharing Knowledge: InsidedenghueiÎncă nu există evaluări
- Wipo Pub 931 050213DLDocument60 paginiWipo Pub 931 050213DLdenghueiÎncă nu există evaluări
- Wipo Pub 930 2013 050213DLDocument66 paginiWipo Pub 930 2013 050213DLdenghueiÎncă nu există evaluări
- R3ASC Summary 1998 2001 2004 2007 2010 2012 2014 15may14Document11 paginiR3ASC Summary 1998 2001 2004 2007 2010 2012 2014 15may14Karad KaradiasÎncă nu există evaluări
- Installation, Operating and Maintenance Manual: Double Eccentric Butterfly ValvesDocument8 paginiInstallation, Operating and Maintenance Manual: Double Eccentric Butterfly ValveszaidÎncă nu există evaluări
- Mek 2Document44 paginiMek 2Gaurav ShuklaÎncă nu există evaluări
- IAI Ethernet IP PCON ACON SpecsheetDocument2 paginiIAI Ethernet IP PCON ACON SpecsheetElectromateÎncă nu există evaluări
- Pneumatic Valve - Viking Xtreme Series - Catalogue PDE2569TCUKDocument64 paginiPneumatic Valve - Viking Xtreme Series - Catalogue PDE2569TCUKBranko BabicÎncă nu există evaluări
- Pneumatic Heavy-Duty Quarter Turn ActautorDocument14 paginiPneumatic Heavy-Duty Quarter Turn ActautorPriyanka rajpurohitÎncă nu există evaluări
- Gruner 227S enDocument22 paginiGruner 227S enErdinç Eşref UsluÎncă nu există evaluări
- Bucyrus Dump Mod Installation Manual - Rev3 PDFDocument17 paginiBucyrus Dump Mod Installation Manual - Rev3 PDFchristopher walkerÎncă nu există evaluări
- Foam System - V.0 - WS PDFDocument82 paginiFoam System - V.0 - WS PDFSajjadÎncă nu există evaluări
- Axial Control Valve BrochureDocument9 paginiAxial Control Valve BrochureJeromeÎncă nu există evaluări
- Systems & Components For The Bus and CoachDocument8 paginiSystems & Components For The Bus and CoachAlessandra NoeliaÎncă nu există evaluări
- Design Volvo A60Document15 paginiDesign Volvo A60reanÎncă nu există evaluări
- Design and Compliance Control of A Robotic Gripper For Orange HarvestingDocument5 paginiDesign and Compliance Control of A Robotic Gripper For Orange HarvestingLeonardoGrandiniAdamiÎncă nu există evaluări
- L&T Report FinalDocument39 paginiL&T Report FinalDivyanshuÎncă nu există evaluări
- 795 Series Double-Diaphragm Pressure-Balanced Actuator (Obsolete Product)Document17 pagini795 Series Double-Diaphragm Pressure-Balanced Actuator (Obsolete Product)gani prayudaÎncă nu există evaluări
- Mokveld-Product Sheet Axial Control ValveDocument2 paginiMokveld-Product Sheet Axial Control Valveจตุพล กมลเลิศÎncă nu există evaluări
- Handling Systems: 7 Options To Choose From To Study Different Mechanical Handling TechniquesDocument18 paginiHandling Systems: 7 Options To Choose From To Study Different Mechanical Handling TechniquesMuhammad Izzamir FirdausÎncă nu există evaluări
- Periodic Preventive Maintenance Safety Check: Manual For Eleganza 1 (1GT) BedDocument5 paginiPeriodic Preventive Maintenance Safety Check: Manual For Eleganza 1 (1GT) BedJorge LagosÎncă nu există evaluări
- DR Esmaeel System 3 Hydraulic PDFDocument38 paginiDR Esmaeel System 3 Hydraulic PDFsbhaleshÎncă nu există evaluări
- Components of Hydraulic and Pneumatic SystemDocument84 paginiComponents of Hydraulic and Pneumatic SystemErvert SoteraniaÎncă nu există evaluări
- Seminar ReportDocument31 paginiSeminar ReportPriyaranjan BeheraÎncă nu există evaluări
- Multi-Turn Actuators SA 07.2 - SA 16.2/SAR 07.2 - SAR 16.2 Control Unit: Electromechanic With Actuator Controls AUMATIC AC 01.2 IntrusiveDocument80 paginiMulti-Turn Actuators SA 07.2 - SA 16.2/SAR 07.2 - SAR 16.2 Control Unit: Electromechanic With Actuator Controls AUMATIC AC 01.2 Intrusivejose ricardo echeverria banegasÎncă nu există evaluări
- Shan-Rod Fabricated Butterfly Valves 4300 Series: Bulletin 4300Document4 paginiShan-Rod Fabricated Butterfly Valves 4300 Series: Bulletin 4300drÎncă nu există evaluări
- Gangway DesignDocument88 paginiGangway DesignGabriel MacaulayÎncă nu există evaluări
- 87-88 Actuator - Technical SpecificationsDocument9 pagini87-88 Actuator - Technical SpecificationsJose Luis Frias ColoradoÎncă nu există evaluări