S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
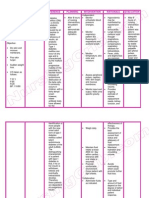
- Nursing Care Plan Diabetes Mellitus Type 1Document2 paginiNursing Care Plan Diabetes Mellitus Type 1deric85% (46)
- Neoclassical CounterrevolutionDocument1 paginăNeoclassical CounterrevolutionGraziella ValerioÎncă nu există evaluări
- User Manual ManoScanDocument58 paginiUser Manual ManoScanNurul FathiaÎncă nu există evaluări
- Sensory Play Activities Kids Will LoveDocument5 paginiSensory Play Activities Kids Will LoveGoh KokMingÎncă nu există evaluări
- ElectricityDocument196 paginiElectricityjingcong liuÎncă nu există evaluări
- Bearing Repeater CompassDocument4 paginiBearing Repeater CompassJohn PerdyÎncă nu există evaluări
- Part-II Poem Article and Report For College Magazine-2015-16 Dr.M.Q. KhanDocument4 paginiPart-II Poem Article and Report For College Magazine-2015-16 Dr.M.Q. KhanTechi Son taraÎncă nu există evaluări
- Case Study 2Document7 paginiCase Study 2api-561058683Încă nu există evaluări
- POLAR BEARS-Biology ProjectDocument16 paginiPOLAR BEARS-Biology Projectserwaa21Încă nu există evaluări
- Allowable Nozzle LoadsDocument6 paginiAllowable Nozzle Loads김동하Încă nu există evaluări
- Shaheed Suhrawardy Medical College HospitalDocument3 paginiShaheed Suhrawardy Medical College HospitalDr. Mohammad Nazrul IslamÎncă nu există evaluări
- Quiz Application in Visual BasicDocument20 paginiQuiz Application in Visual BasicShivangi SahaÎncă nu există evaluări
- New York LifeDocument38 paginiNew York LifeDaniel SineusÎncă nu există evaluări
- 100 IELTS Essay Topics For IELTS Writing - My IELTS Classroom BlogDocument16 pagini100 IELTS Essay Topics For IELTS Writing - My IELTS Classroom BlogtestÎncă nu există evaluări
- Evelyn Arizpe - Teresa Colomer - Carmen Martínez-Roldán - Visual Journeys Through Wordless Narratives - An International Inquiry With Immigrant Children and The Arrival-Bloomsbury Academic (2014)Document290 paginiEvelyn Arizpe - Teresa Colomer - Carmen Martínez-Roldán - Visual Journeys Through Wordless Narratives - An International Inquiry With Immigrant Children and The Arrival-Bloomsbury Academic (2014)Lucia QuirogaÎncă nu există evaluări
- Warranties Liabilities Patents Bids and InsuranceDocument39 paginiWarranties Liabilities Patents Bids and InsuranceIVAN JOHN BITONÎncă nu există evaluări
- Unit 9 TelephoningDocument14 paginiUnit 9 TelephoningDaniela DanilovÎncă nu există evaluări
- Manual Safety Installation Operations Tescom en 123946Document23 paginiManual Safety Installation Operations Tescom en 123946Karikalan JayÎncă nu există evaluări
- Certification Programs: Service As An ExpertiseDocument5 paginiCertification Programs: Service As An ExpertiseMaria RobÎncă nu există evaluări
- Networking With OrganizationsDocument23 paginiNetworking With OrganizationsClaudette Lui Cabanos- Mercado-ReyesÎncă nu există evaluări
- Support of Roof and Side in Belowground Coal MinesDocument5 paginiSupport of Roof and Side in Belowground Coal MinesNavdeep MandalÎncă nu există evaluări
- A A ADocument5 paginiA A ASalvador__DaliÎncă nu există evaluări
- Electric Heater Datasheet: Duty Bundle (@nom Voltage) Duty Heater (@nom Voltage)Document3 paginiElectric Heater Datasheet: Duty Bundle (@nom Voltage) Duty Heater (@nom Voltage)SonNguyenÎncă nu există evaluări
- FS1 Worksheet Topic 6Document2 paginiFS1 Worksheet Topic 6ALMALYN ANDIHÎncă nu există evaluări
- North Rig 4Document1 paginăNorth Rig 4avefenix666Încă nu există evaluări
- AMST 398 SyllabusDocument7 paginiAMST 398 SyllabusNatÎncă nu există evaluări
- University Physics With Modern Physics 2nd Edition Bauer Test BankDocument24 paginiUniversity Physics With Modern Physics 2nd Edition Bauer Test BankJustinTaylorepga100% (42)
- MP CRPDocument2 paginiMP CRPankutupanaÎncă nu există evaluări
- Plasterboard FyrchekDocument4 paginiPlasterboard FyrchekAlex ZecevicÎncă nu există evaluări
- Library SectionsDocument4 paginiLibrary SectionsGello Sotnuiq100% (4)