S-ar putea să vă placă și
- CBIP2010 Considerations and Methods For Effective FBT PDFDocument12 paginiCBIP2010 Considerations and Methods For Effective FBT PDFeagles1109Încă nu există evaluări
- VSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsDe la EverandVSC-FACTS-HVDC: Analysis, Modelling and Simulation in Power GridsÎncă nu există evaluări
- Trafo ProtectionDocument12 paginiTrafo Protectionnishant choudharyÎncă nu există evaluări
- Power System PDFDocument31 paginiPower System PDFFaiza FofaÎncă nu există evaluări
- IEEE 1584 RevisionsDocument6 paginiIEEE 1584 RevisionsHugo Dennis Mattos EspinozaÎncă nu există evaluări
- Siemens Literature-Automatic Bus TransferDocument2 paginiSiemens Literature-Automatic Bus TransferKrishna VenkataramanÎncă nu există evaluări
- Article - Characteristics of Circuit Breaker Trip Curves and CoordinationDocument4 paginiArticle - Characteristics of Circuit Breaker Trip Curves and CoordinationHassenLÎncă nu există evaluări
- Interlockingonswitchgearprinciples 151126195644 Lva1 App6892Document8 paginiInterlockingonswitchgearprinciples 151126195644 Lva1 App6892Dinesh Pitchaivel100% (1)
- DC Arc Flash Calculation Example: Test Project: DC DemoDocument8 paginiDC Arc Flash Calculation Example: Test Project: DC DemomiguelpaltinoÎncă nu există evaluări
- Type - 2 CoordinationDocument3 paginiType - 2 CoordinationSudhir SainiÎncă nu există evaluări
- Capacitor Bank ProtectionDocument12 paginiCapacitor Bank ProtectionBafundi Cishe100% (1)
- Arc Flash Presentation IEEE CED FinalDocument68 paginiArc Flash Presentation IEEE CED FinalzomglolzscribdÎncă nu există evaluări
- Motor Protection-Basic ExplanationDocument23 paginiMotor Protection-Basic ExplanationedyÎncă nu există evaluări
- Page 1 of 4 Why Your Capacitor Bank Should Be Left UngroundedDocument4 paginiPage 1 of 4 Why Your Capacitor Bank Should Be Left UngroundedArunava BasakÎncă nu există evaluări
- 14 - Notes - Power Quality PartII - Harmonic Filters PDFDocument18 pagini14 - Notes - Power Quality PartII - Harmonic Filters PDFWillam Metz100% (1)
- SWICON 2008 Technical PapersDocument368 paginiSWICON 2008 Technical Papersboopelectra100% (1)
- Capacitor Bank.Document19 paginiCapacitor Bank.rajudhandekarÎncă nu există evaluări
- KR Monograph July2013Document410 paginiKR Monograph July2013Soumya RoyÎncă nu există evaluări
- InrushDocument226 paginiInrushDinesh SelvakumarÎncă nu există evaluări
- Performance and failures of CTs and CVTs in POWERGRIDDocument61 paginiPerformance and failures of CTs and CVTs in POWERGRIDS ManoharÎncă nu există evaluări
- Voltage Transformers Type UMZDocument25 paginiVoltage Transformers Type UMZpattarawatÎncă nu există evaluări
- SWGR PresentationDocument92 paginiSWGR PresentationArchita SaxenaÎncă nu există evaluări
- Arc Flash Hazard Standards The Burning Question SeshaDocument0 paginiArc Flash Hazard Standards The Burning Question SeshaFikret VelagicÎncă nu există evaluări
- Overview of Grid Code and Operational Requirements of Grid-Connected Solar PV Power Plants-NOTA TECNICADocument7 paginiOverview of Grid Code and Operational Requirements of Grid-Connected Solar PV Power Plants-NOTA TECNICAEdgardo Kat ReyesÎncă nu există evaluări
- TS Case 1 - Stability On A One-Unit-to-Grid System: DescriptionDocument3 paginiTS Case 1 - Stability On A One-Unit-to-Grid System: DescriptionFrancisco AndradeÎncă nu există evaluări
- Erdc D0007Document11 paginiErdc D0007Zaks MoreÎncă nu există evaluări
- Motor Thermal Overload ProtectionDocument5 paginiMotor Thermal Overload ProtectionSum BarzegaranÎncă nu există evaluări
- Why StudiesDocument4 paginiWhy StudiesDheeraj YadavÎncă nu există evaluări
- POWER DEVICES IMPLEMENTATION & ANALYSIS ON ETAP by Abhilash ReddyDocument26 paginiPOWER DEVICES IMPLEMENTATION & ANALYSIS ON ETAP by Abhilash ReddyAbhilash ReddyÎncă nu există evaluări
- Reference ArcFlashDocument139 paginiReference ArcFlashicaro100% (1)
- IS 2165 Part1-1977 Ins Coord - Phase To Earth PDFDocument28 paginiIS 2165 Part1-1977 Ins Coord - Phase To Earth PDFRohit DeraÎncă nu există evaluări
- Is.3842.1.1967 - Application Guide For Electrical Relays For Ac Systems, Part 1 Overcurrent Relays For Feeders and Transformers PDFDocument64 paginiIs.3842.1.1967 - Application Guide For Electrical Relays For Ac Systems, Part 1 Overcurrent Relays For Feeders and Transformers PDFChristian MarquezÎncă nu există evaluări
- Per Unit System PPDocument15 paginiPer Unit System PPfatank04100% (1)
- Presentation On Insulation CoordinationDocument17 paginiPresentation On Insulation CoordinationBhavik PrajapatiÎncă nu există evaluări
- Bus Protection Device Coordination ReportDocument6 paginiBus Protection Device Coordination ReportMichael S. NuezÎncă nu există evaluări
- Technical Comparison of Harmonic Mitigation PDFDocument9 paginiTechnical Comparison of Harmonic Mitigation PDFGurmeet SinghÎncă nu există evaluări
- LV Network Calculations and Use of AmtechDocument38 paginiLV Network Calculations and Use of AmtechAbraham JyothimonÎncă nu există evaluări
- Technical Basics For Grid ConnectionDocument73 paginiTechnical Basics For Grid ConnectionHilal SaidÎncă nu există evaluări
- Philosophy Protn CoordinationDocument12 paginiPhilosophy Protn CoordinationRitaban222Încă nu există evaluări
- Control PQ y PV PDFDocument93 paginiControl PQ y PV PDFjano_rdrÎncă nu există evaluări
- Power Engineering Training CourseDocument254 paginiPower Engineering Training Courseme_chÎncă nu există evaluări
- Arc FlashDocument7 paginiArc FlashniksharrisÎncă nu există evaluări
- Fast Bus Changeover PDFDocument8 paginiFast Bus Changeover PDFhussainÎncă nu există evaluări
- Reactors in power system: roles, types, installation and protectionDocument78 paginiReactors in power system: roles, types, installation and protectionAdil Farzand100% (4)
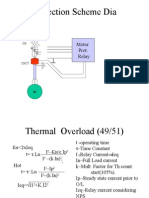
- Protection Scheme Dia: Motor Prot. RelayDocument9 paginiProtection Scheme Dia: Motor Prot. RelayPradipta Kumar MohantyÎncă nu există evaluări
- Auto Bus Transfer Scheme in Power PlantsDocument58 paginiAuto Bus Transfer Scheme in Power Plantsashu_pandaÎncă nu există evaluări
- Battery Rating:: Technical SpecificationDocument6 paginiBattery Rating:: Technical SpecificationAnonymous 0BYsFuVÎncă nu există evaluări
- VSTPP Transformer Failures at VindhyachalDocument96 paginiVSTPP Transformer Failures at VindhyachalSam100% (1)
- Power Quality Report RecommendationsDocument9 paginiPower Quality Report RecommendationssoripiciuÎncă nu există evaluări
- KTH IEC 61850 For Substation Automation 2013-04-12Document105 paginiKTH IEC 61850 For Substation Automation 2013-04-12Chad WoodÎncă nu există evaluări
- Selection of Surge Protective Device (SPD) - (Part 1)Document5 paginiSelection of Surge Protective Device (SPD) - (Part 1)supermannonÎncă nu există evaluări
- Control CableDocument2 paginiControl CableMuhammed FazilÎncă nu există evaluări
- Knowledge is "Real Power": Introduction to Power QualityDe la EverandKnowledge is "Real Power": Introduction to Power QualityÎncă nu există evaluări
- Switching in Electrical Transmission and Distribution SystemsDe la EverandSwitching in Electrical Transmission and Distribution SystemsÎncă nu există evaluări
- Integration of Green and Renewable Energy in Electric Power SystemsDe la EverandIntegration of Green and Renewable Energy in Electric Power SystemsÎncă nu există evaluări
- Street Lighting Installation Worker: Passbooks Study GuideDe la EverandStreet Lighting Installation Worker: Passbooks Study GuideÎncă nu există evaluări
- Arc Control in Circuit Breakers: Low Contact Velocity 2nd EditionDe la EverandArc Control in Circuit Breakers: Low Contact Velocity 2nd EditionÎncă nu există evaluări
- USCO Catalog DisconnectorDocument56 paginiUSCO Catalog DisconnectornitinpeÎncă nu există evaluări
- Multi RelayDocument27 paginiMulti RelaynitinpeÎncă nu există evaluări
- Disconnector ABBDocument16 paginiDisconnector ABBnitinpeÎncă nu există evaluări
- Multi RelayDocument27 paginiMulti RelaynitinpeÎncă nu există evaluări
- 9LT HT NEW LP - Price ListDocument5 pagini9LT HT NEW LP - Price ListnitinpeÎncă nu există evaluări
- Zig Zag TransformerDocument4 paginiZig Zag Transformernitinpe100% (2)
- Universal Cables Price ListDocument6 paginiUniversal Cables Price ListAdnan Anwer0% (4)
- Cable Price List - HavellsDocument2 paginiCable Price List - HavellsnitinpeÎncă nu există evaluări
- Ecology QuizDocument4 paginiEcology QuiznitinpeÎncă nu există evaluări
- Equivalence Chart: Part No Description Old Material No 2007 Trade PriceDocument2 paginiEquivalence Chart: Part No Description Old Material No 2007 Trade PricenitinpeÎncă nu există evaluări
- The Three-Phase Squirrel-Cage Inductor Motor: Ac MachineryDocument7 paginiThe Three-Phase Squirrel-Cage Inductor Motor: Ac MachineryGeva GarradoÎncă nu există evaluări
- FRF800E SeriesDocument6 paginiFRF800E SeriesgalvangrrÎncă nu există evaluări
- 2019 Full Exam SolutionDocument8 pagini2019 Full Exam SolutionAhmed AliÎncă nu există evaluări
- Electric MotorsDocument30 paginiElectric MotorsAmanpreet SinghÎncă nu există evaluări
- SKM Product BrochureDocument48 paginiSKM Product BrochureyalmanzaÎncă nu există evaluări
- Estimating Typical Parameters for Simulating Squirrel-Cage Induction MotorsDocument10 paginiEstimating Typical Parameters for Simulating Squirrel-Cage Induction MotorscontenteeeÎncă nu există evaluări
- Automation and Robotic Lec 2Document9 paginiAutomation and Robotic Lec 2Josh Sam Rindai MhlangaÎncă nu există evaluări
- 17 Samss 503Document8 pagini17 Samss 503munnaÎncă nu există evaluări
- MV January 2014 EEDocument10 paginiMV January 2014 EEMargo Isay EriveÎncă nu există evaluări
- Lecture06 HandoutDocument7 paginiLecture06 HandoutBotlhe SomolekaeÎncă nu există evaluări
- Principles and Practice of Electrical EngineeringDocument422 paginiPrinciples and Practice of Electrical EngineeringSaiKishoreÎncă nu există evaluări
- Max - E2: Low Voltage 3-Phase Induction Motors 0.18kW To 185kWDocument36 paginiMax - E2: Low Voltage 3-Phase Induction Motors 0.18kW To 185kWOmprakash_janaÎncă nu există evaluări
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 paginiDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666Încă nu există evaluări
- D. P. Sen Gupta, J. W. Lynn (Auth.) - Electrical Machine Dynamics-Macmillan Education UK (1980)Document310 paginiD. P. Sen Gupta, J. W. Lynn (Auth.) - Electrical Machine Dynamics-Macmillan Education UK (1980)Jay Acer100% (5)
- Electrical Engineering Full Paper 2007Document27 paginiElectrical Engineering Full Paper 2007Khatri RaviÎncă nu există evaluări
- Automatic Power Factor Correction Using PIC MicrocontrollerDocument92 paginiAutomatic Power Factor Correction Using PIC MicrocontrollerAsad AsifÎncă nu există evaluări
- Etap Tip 008Document6 paginiEtap Tip 008yetignr0% (1)
- LN 1226 EWG - enDocument24 paginiLN 1226 EWG - enM. T.Încă nu există evaluări
- Standard Specification For MotorDocument13 paginiStandard Specification For MotorSubhendu JanaÎncă nu există evaluări
- Ejemplo Modelo Motor - PSSEDocument2 paginiEjemplo Modelo Motor - PSSEAnton MatzÎncă nu există evaluări
- Induction Relay Types - Disc, Cup & Their WorkingDocument8 paginiInduction Relay Types - Disc, Cup & Their WorkinghilalsherÎncă nu există evaluări
- ICE Export Catalog 2011Document72 paginiICE Export Catalog 2011elkhalfiÎncă nu există evaluări
- ME2143-1 Lab ManualDocument10 paginiME2143-1 Lab ManualJoshua ChooÎncă nu există evaluări
- FR100 Series User Manual en V1.5 20180511Document131 paginiFR100 Series User Manual en V1.5 20180511RICHARD0% (2)
- Induction Motor 15kWDocument8 paginiInduction Motor 15kWAnnamali ThiayagarajanÎncă nu există evaluări
- Synchronous Machines PDFDocument49 paginiSynchronous Machines PDFPradeep_VashistÎncă nu există evaluări
- Condition Monitoring Methods, Failure Identification and Analysis For Induction MachinesDocument8 paginiCondition Monitoring Methods, Failure Identification and Analysis For Induction MachinesRamya DeviÎncă nu există evaluări
- SynchrosDocument43 paginiSynchrosjashjaÎncă nu există evaluări
- Power Electronics and Drives U4Document58 paginiPower Electronics and Drives U4Idiots Idiotss100% (1)
- Load Test of A Single-Phase Induction MotorDocument18 paginiLoad Test of A Single-Phase Induction MotorChin Chin EdraÎncă nu există evaluări