S-ar putea să vă placă și
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsDe la EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsÎncă nu există evaluări
- Bode Plots: Multiple Choice Questions For Online ExamDocument23 paginiBode Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtÎncă nu există evaluări
- Compensation in Control SystemDocument10 paginiCompensation in Control Systemshouvikchaudhuri0% (1)
- Proteus VSMDocument2 paginiProteus VSMbouje72Încă nu există evaluări
- ECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. JacksonDocument4 paginiECE485/585: Programmable Logic Controllers Exam #1 (Sample Style Questions) Instructor: Dr. D. J. Jacksonnida haqÎncă nu există evaluări
- Lab 6 LCS 078Document13 paginiLab 6 LCS 078Asad saeedÎncă nu există evaluări
- EEE3001 Software ManualDocument34 paginiEEE3001 Software ManualManuDubeyÎncă nu există evaluări
- PIC To PIC Communication Using UARTDocument9 paginiPIC To PIC Communication Using UARTUma Shankar100% (1)
- Inverse Nichols Chart ProblemDocument5 paginiInverse Nichols Chart ProblemKgotsofalang Kayson Nqhwaki0% (1)
- FCS Lab2Document36 paginiFCS Lab2muhammadÎncă nu există evaluări
- Economic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleDocument26 paginiEconomic Load Dispatch (Optimal Power Flow) : by Adisu TeshaleAdisuÎncă nu există evaluări
- Problem Sheet No 5Document2 paginiProblem Sheet No 5mahad ashfaq33% (3)
- Laplace Transform ExamplesDocument19 paginiLaplace Transform Exampleshamza abdo mohamoudÎncă nu există evaluări
- Pic 18Document78 paginiPic 18anses1000Încă nu există evaluări
- Lab Manual - TheoryDocument49 paginiLab Manual - TheoryLovely VinayÎncă nu există evaluări
- Akra, Bazzi - On The Solution of Linear Recurrence Equations PDFDocument16 paginiAkra, Bazzi - On The Solution of Linear Recurrence Equations PDFSHIVAM GUPTAÎncă nu există evaluări
- PIC18F4550 I2C - PIC ControllersDocument8 paginiPIC18F4550 I2C - PIC ControllersKrishanu Modak100% (1)
- Generating 50Hz PWM Using PIC16F877ADocument2 paginiGenerating 50Hz PWM Using PIC16F877AZarko DacevicÎncă nu există evaluări
- How Does Microprocessor Differentiate Between Data and InstructionDocument60 paginiHow Does Microprocessor Differentiate Between Data and InstructionUbaid Saudagar100% (1)
- Program For Arranging Data Array in Ascending OrderDocument5 paginiProgram For Arranging Data Array in Ascending OrderTanishqa RawlaniÎncă nu există evaluări
- Pic ProjectsDocument6 paginiPic ProjectsAmr GhonemÎncă nu există evaluări
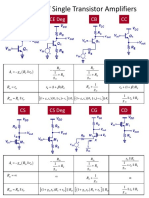
- Transistor Amplifier SummaryDocument1 paginăTransistor Amplifier SummaryJhonÎncă nu există evaluări
- "Bridge B2HZ" For The Control of A DC MotorDocument16 pagini"Bridge B2HZ" For The Control of A DC MotorhadiÎncă nu există evaluări
- InverterDocument53 paginiInverterAgus SetyawanÎncă nu există evaluări
- Transformer Less POWER SUPPLY REPORTDocument7 paginiTransformer Less POWER SUPPLY REPORTضياء بن احمد الكباري67% (3)
- Load Flow Matrices IIT Roorkee Notes NPTELDocument88 paginiLoad Flow Matrices IIT Roorkee Notes NPTELconsultrail100% (1)
- SCR Firing CircuitsDocument4 paginiSCR Firing CircuitsShubham BagalÎncă nu există evaluări
- Lab Report On ECE 210 Lab1Document6 paginiLab Report On ECE 210 Lab1Joanne Lai100% (1)
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDocument7 paginiTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Time Response AnalysisDocument43 paginiTime Response AnalysisAkmal IsnaeniÎncă nu există evaluări
- Calculation PPT For EnergyDocument12 paginiCalculation PPT For EnergyMalyaj MishraÎncă nu există evaluări
- Experiment 3 Economic Load DispatchDocument12 paginiExperiment 3 Economic Load DispatchMahesh KambleÎncă nu există evaluări
- Week 4Document39 paginiWeek 4EVTÎncă nu există evaluări
- Lecture-5 Modeling of Electromechanical SystemsDocument19 paginiLecture-5 Modeling of Electromechanical Systemsusama asifÎncă nu există evaluări
- EEE F427 - Lecture 6Document29 paginiEEE F427 - Lecture 6james40440Încă nu există evaluări
- Bode PlotDocument7 paginiBode Plotnabilo20Încă nu există evaluări
- Polar & Nyquist Plots: Multiple Choice Questions For Online ExamDocument18 paginiPolar & Nyquist Plots: Multiple Choice Questions For Online ExamRajeev Singh BishtÎncă nu există evaluări
- Nyquist PlotsDocument10 paginiNyquist PlotsUmy KalsoomÎncă nu există evaluări
- Lecture 14 Memory InterfaceDocument19 paginiLecture 14 Memory Interfacenjpar0% (2)
- Design of PID ControllerDocument13 paginiDesign of PID ControllershrikrisÎncă nu există evaluări
- Chapter 11: Dynamic Force AnalysisDocument34 paginiChapter 11: Dynamic Force AnalysisSurenderan LoganÎncă nu există evaluări
- Double Frequency Buck ConverterDocument68 paginiDouble Frequency Buck ConverterSanthosh GuduruÎncă nu există evaluări
- Lab 4-Discrete-Time Filters With FIR Systems Edit1 X 14Document12 paginiLab 4-Discrete-Time Filters With FIR Systems Edit1 X 14Oscar EsparzaÎncă nu există evaluări
- CBPSD-lab Manual PDFDocument40 paginiCBPSD-lab Manual PDFShiv Rajput80% (10)
- Unit6 Resonance Circuit (VTU)Document23 paginiUnit6 Resonance Circuit (VTU)fanah_13100% (1)
- DC-DC Switching Boost ConverterDocument16 paginiDC-DC Switching Boost ConverterRaden Mas AgoenkÎncă nu există evaluări
- Lab Manual - EEE 402 - Exp01 July2014Document7 paginiLab Manual - EEE 402 - Exp01 July2014AhammadSifatÎncă nu există evaluări
- Reduction of Multiple SubsystemsDocument28 paginiReduction of Multiple SubsystemsDian Riana MustafaÎncă nu există evaluări
- QUBE-Servo DC Motor ModelingDocument5 paginiQUBE-Servo DC Motor Modelingandres guerreroÎncă nu există evaluări
- Lesson 13 Induction Motor Model Example: ET 332b Ac Motors, Generators and Power SystemsDocument8 paginiLesson 13 Induction Motor Model Example: ET 332b Ac Motors, Generators and Power SystemsJocel GuzmanÎncă nu există evaluări
- Simulation - Thermal AssignmentDocument2 paginiSimulation - Thermal Assignmentsumardiono10Încă nu există evaluări
- Course Objective: To Design Microwave AmplifierDocument3 paginiCourse Objective: To Design Microwave AmplifierAshwini KothavaleÎncă nu există evaluări
- MatLab AssignmentDocument9 paginiMatLab AssignmentTher Htet AungÎncă nu există evaluări
- Police Light FinalDocument4 paginiPolice Light Finalmrindian88Încă nu există evaluări
- Mechatronics (2015) Unit IIDocument38 paginiMechatronics (2015) Unit IIkishan100% (1)
- Arduino SPWM Sine InverterDocument5 paginiArduino SPWM Sine InvertermaurilioctbaÎncă nu există evaluări
- Power Electronics Converters and their Control for Renewable Energy ApplicationsDe la EverandPower Electronics Converters and their Control for Renewable Energy ApplicationsArezki FekikÎncă nu există evaluări
- Nichols Charts: Stability & FeedbackDocument7 paginiNichols Charts: Stability & FeedbackArsenal HolicÎncă nu există evaluări
- NMB34203 - ch6 - Frequency Response (Bode Plot)Document45 paginiNMB34203 - ch6 - Frequency Response (Bode Plot)fatinÎncă nu există evaluări
- Epas G9 M Q3 W3-W4Document4 paginiEpas G9 M Q3 W3-W4ALLYSSA MAE PELONIAÎncă nu există evaluări
- Pages From FDM (Ducted Split R22) - 6 PDFDocument1 paginăPages From FDM (Ducted Split R22) - 6 PDFZiyadawaliÎncă nu există evaluări
- 72.5 - 420kV Current Transformer (New)Document4 pagini72.5 - 420kV Current Transformer (New)narinderÎncă nu există evaluări
- Lecture 9 Magnetic Fields Due To Currents Ch. 30Document26 paginiLecture 9 Magnetic Fields Due To Currents Ch. 30terrygohÎncă nu există evaluări
- SIEPC80000045C SigmaV User Manual Design Maintenance Rotational MotorDocument402 paginiSIEPC80000045C SigmaV User Manual Design Maintenance Rotational MotorNguyễn Hữu Tuân100% (1)
- Belereaces: Chap. RepDocument11 paginiBelereaces: Chap. Repkenlavie2Încă nu există evaluări
- Transformer Power EquationsDocument2 paginiTransformer Power EquationsBudi LindrawatiÎncă nu există evaluări
- Battery Technology Crash Course A Concise Introduction by Slobodan PetrovicDocument123 paginiBattery Technology Crash Course A Concise Introduction by Slobodan Petrovicsamsonit1100% (3)
- MM410 Catalogue 09-01 enDocument14 paginiMM410 Catalogue 09-01 enbajricaÎncă nu există evaluări
- Standard Abbreviation List by Siemens 20Document1 paginăStandard Abbreviation List by Siemens 20Pendl PendlÎncă nu există evaluări
- Questions & Answers On Constructional Features of Rotating Electrical MachinesDocument17 paginiQuestions & Answers On Constructional Features of Rotating Electrical Machineskibrom atsbhaÎncă nu există evaluări
- Strong Cast: Test Full AmplifiersDocument8 paginiStrong Cast: Test Full AmplifiersyanmaesÎncă nu există evaluări
- Mounting Instructions - 123ignitionDocument5 paginiMounting Instructions - 123ignitionminimaniaÎncă nu există evaluări
- Instrument InstallationDocument4 paginiInstrument InstallationadelmnrÎncă nu există evaluări
- Design of A Wireless Power Transfer System Using Inductive Coupling and MATLAB ProgrammingDocument9 paginiDesign of A Wireless Power Transfer System Using Inductive Coupling and MATLAB Programmingvijay patilÎncă nu există evaluări
- Terminating and Connecting of Electrical Wirings and Electronics Circuits - Part1 PDFDocument43 paginiTerminating and Connecting of Electrical Wirings and Electronics Circuits - Part1 PDFgerwin100% (1)
- Science5 ST3 Q3Document4 paginiScience5 ST3 Q3ronaldÎncă nu există evaluări
- Active and Reactive Power Injection Strategies For Three-Phase Four-Wire Inverters During Symmetrical/Asymmetrical Voltage SagsDocument9 paginiActive and Reactive Power Injection Strategies For Three-Phase Four-Wire Inverters During Symmetrical/Asymmetrical Voltage SagsRamesh NaiduÎncă nu există evaluări
- SP0407 C04 Ver 1Document20 paginiSP0407 C04 Ver 1VinzoKeiÎncă nu există evaluări
- 9020-0618 MCS Multi-Criteria SensorDocument2 pagini9020-0618 MCS Multi-Criteria SensorGUZMANÎncă nu există evaluări
- Mobira MD59 Modifications For Radio Amateur Use: (Draft Version)Document4 paginiMobira MD59 Modifications For Radio Amateur Use: (Draft Version)DefaultAnomolyÎncă nu există evaluări
- Balun QEX Chris - Trask PDFDocument13 paginiBalun QEX Chris - Trask PDFNestor Alberto EscalaÎncă nu există evaluări
- Ats-021 022Document4 paginiAts-021 022Nebojša MaletinÎncă nu există evaluări
- Hcf4017 Data SheetDocument11 paginiHcf4017 Data SheetFilipe CoimbraÎncă nu există evaluări
- Harmonics: Passive FiltersDocument12 paginiHarmonics: Passive FiltersPop-Coman SimionÎncă nu există evaluări
- Heat Flow Control From Thermal Transistor To Thermal Logic GateDocument36 paginiHeat Flow Control From Thermal Transistor To Thermal Logic GategiridharkumarabÎncă nu există evaluări
- Canalis KTA 800 - 4000A PDFDocument205 paginiCanalis KTA 800 - 4000A PDFband summersÎncă nu există evaluări
- Coulomb's Law PacketDocument4 paginiCoulomb's Law PacketMohit MjÎncă nu există evaluări
- 0.047uf - 1uf 160V Variations K42Y-2 PIO Capacitors USSR NOS New - EbayDocument1 pagină0.047uf - 1uf 160V Variations K42Y-2 PIO Capacitors USSR NOS New - Ebayniko grigoratosÎncă nu există evaluări