S-ar putea să vă placă și
- Multi-Camera Platform For Panoramic Real-Time HDR Video Construction and RenderingDocument11 paginiMulti-Camera Platform For Panoramic Real-Time HDR Video Construction and RenderingRich ManÎncă nu există evaluări
- Exposure FusionDocument9 paginiExposure FusionlurkeÎncă nu există evaluări
- Tone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionDe la EverandTone Mapping: Tone Mapping: Illuminating Perspectives in Computer VisionÎncă nu există evaluări
- Graphite 2006Document9 paginiGraphite 2006Pál HústalzÎncă nu există evaluări
- Rendering High Dynamic Range Images: BdepmentDocument10 paginiRendering High Dynamic Range Images: BdepmentEverton Ferreira dos SantosÎncă nu există evaluări
- Ghost Detection and RemovalDocument23 paginiGhost Detection and RemovalZHappy FeetzÎncă nu există evaluări
- Design & Implementation of Image Compression Using Huffman Coding Through VHDL, Kumar KeshamoniDocument7 paginiDesign & Implementation of Image Compression Using Huffman Coding Through VHDL, Kumar KeshamoniKumar Goud.KÎncă nu există evaluări
- Deep High Dynamic Range Imaging With Large Foreground MotionsDocument16 paginiDeep High Dynamic Range Imaging With Large Foreground MotionsJames LiÎncă nu există evaluări
- Patle 2016 Ijca 912485Document4 paginiPatle 2016 Ijca 912485akttripathiÎncă nu există evaluări
- Hdrplus PreprintDocument12 paginiHdrplus PreprintBen KalziqiÎncă nu există evaluări
- 3d Gaussian Splatting HighDocument14 pagini3d Gaussian Splatting HighSteveÎncă nu există evaluări
- Learning To See in The Dark: Convert Shorter Exposure Images To Longer Exposure ImagesDocument8 paginiLearning To See in The Dark: Convert Shorter Exposure Images To Longer Exposure ImageskalluÎncă nu există evaluări
- Litrature Review On Improving Method of Image ReconstructionDocument25 paginiLitrature Review On Improving Method of Image ReconstructionUnnati PatelÎncă nu există evaluări
- Cascaded Light Propagation Volumes For Real-Time Indirect IlluminationDocument9 paginiCascaded Light Propagation Volumes For Real-Time Indirect IlluminationmfbaranowÎncă nu există evaluări
- Multi-Modal SensorsDocument8 paginiMulti-Modal SensorsThuan NguyenÎncă nu există evaluări
- Image EnhancementDocument27 paginiImage EnhancementJitendra YadavÎncă nu există evaluări
- Image RestorationDocument92 paginiImage RestorationDevajeet DasÎncă nu există evaluări
- Lossless Image Compression Algorithm For Transmitting Over Low Bandwidth LineDocument6 paginiLossless Image Compression Algorithm For Transmitting Over Low Bandwidth Lineeditor_ijarcsseÎncă nu există evaluări
- PanoWS Dresden2004 ChapmanDocument8 paginiPanoWS Dresden2004 Chapmanchandrasekhar71Încă nu există evaluări
- High Speed High Dynamic Range 3D Shape Measuremente Based On Deep LearningDocument9 paginiHigh Speed High Dynamic Range 3D Shape Measuremente Based On Deep LearningHarre Bams Ayma ArandaÎncă nu există evaluări
- 2024 DaiDocument12 pagini2024 DaielgharizahcentreÎncă nu există evaluări
- HDR Image Reconstruction Using Segmented Image LearningDocument14 paginiHDR Image Reconstruction Using Segmented Image LearningDr E SAKTHIVEL SÎncă nu există evaluări
- Effective Dynamic Range Evaluation of Digital Still Images in Mobile DevicesDocument8 paginiEffective Dynamic Range Evaluation of Digital Still Images in Mobile DevicesOscar Fernandez PerezÎncă nu există evaluări
- Reinhard Photographic PDFDocument10 paginiReinhard Photographic PDFtaunbv7711Încă nu există evaluări
- ViewDocument11 paginiViewbjoo46Încă nu există evaluări
- EG Practical HDR Broadcast WorkflowsDocument16 paginiEG Practical HDR Broadcast Workflowsjohn anthonyÎncă nu există evaluări
- In PaintingDocument6 paginiIn PaintingnugrohoÎncă nu există evaluări
- Multi-Focus Image Fusion For Extended Depth of Field: Wisarut Chantara and Yo-Sung HoDocument4 paginiMulti-Focus Image Fusion For Extended Depth of Field: Wisarut Chantara and Yo-Sung Hofiza ashfaqÎncă nu există evaluări
- RAISR: Rapid and Accurate Image Super Resolution: Yaniv Romano, John Isidoro, and Peyman Milanfar, Fellow, IEEEDocument31 paginiRAISR: Rapid and Accurate Image Super Resolution: Yaniv Romano, John Isidoro, and Peyman Milanfar, Fellow, IEEEvivekvwÎncă nu există evaluări
- Colorization Using OptimizationDocument6 paginiColorization Using OptimizationdefefalienÎncă nu există evaluări
- Local Edge-Preserving Multiscale Decomposition For High Dynamic Range Image Tone MappingDocument12 paginiLocal Edge-Preserving Multiscale Decomposition For High Dynamic Range Image Tone MappinglambanaveenÎncă nu există evaluări
- Zou Learning To Reconstruct High Speed and High Dynamic Range Videos CVPR 2021 PaperDocument10 paginiZou Learning To Reconstruct High Speed and High Dynamic Range Videos CVPR 2021 PaperSunilmahek MahekÎncă nu există evaluări
- Bridgenet: A Joint Learning Network of Depth Map Super-Resolution and Monocular Depth EstimationDocument10 paginiBridgenet: A Joint Learning Network of Depth Map Super-Resolution and Monocular Depth Estimation唐麒麒Încă nu există evaluări
- MERF: Memory-Efficient Radiance Fields For Real-Time View Synthesis in Unbounded ScenesDocument10 paginiMERF: Memory-Efficient Radiance Fields For Real-Time View Synthesis in Unbounded ScenesVetal YeshorÎncă nu există evaluări
- A Frequency Domain Approach To Registration Ofaliased Images With Application To Super-ResolutionDocument16 paginiA Frequency Domain Approach To Registration Ofaliased Images With Application To Super-ResolutionSohini RoyÎncă nu există evaluări
- Bilagrid WebDocument9 paginiBilagrid Webyuheng weiÎncă nu există evaluări
- Sensors 22 06923Document28 paginiSensors 22 06923jhvghvghjvgjhÎncă nu există evaluări
- S Patio Temporal Kernel RegressionDocument18 paginiS Patio Temporal Kernel Regressionsonalidhali157622Încă nu există evaluări
- Recovering High Dynamic Range Radiance Maps From PhotographsDocument10 paginiRecovering High Dynamic Range Radiance Maps From PhotographsAkshay PhadkeÎncă nu există evaluări
- Digital Photography: High Dynamic RangeDocument4 paginiDigital Photography: High Dynamic Rangeerik rainierÎncă nu există evaluări
- Image Enhancement Under Improper Lightning Condition: A Project Review OnDocument27 paginiImage Enhancement Under Improper Lightning Condition: A Project Review OnSai KumarÎncă nu există evaluări
- Mixed PDFDocument9 paginiMixed PDFatom tuxÎncă nu există evaluări
- Public Health MT#1Document3 paginiPublic Health MT#1RaymondÎncă nu există evaluări
- (Yu2018) Haze Removal Algorithm Using Color Attenuation Prior and Guided FilterDocument5 pagini(Yu2018) Haze Removal Algorithm Using Color Attenuation Prior and Guided FilterK SavitriÎncă nu există evaluări
- Lossy Image Compression by Rounding The Intensity Followed by Dividing (RIFDDocument6 paginiLossy Image Compression by Rounding The Intensity Followed by Dividing (RIFDSomaya ZacoutÎncă nu există evaluări
- Hardware Implementation of Real-Time Multiple Frame Super-ResolutionDocument6 paginiHardware Implementation of Real-Time Multiple Frame Super-Resolutionmouhamed al amin BenattiaÎncă nu există evaluări
- Synopsis PDF Batch40Document11 paginiSynopsis PDF Batch40vgmanjunathaÎncă nu există evaluări
- Learning To Correct Overexposed and Underexposed PhotosDocument23 paginiLearning To Correct Overexposed and Underexposed PhotosNei Cardoso De Oliveira NetoÎncă nu există evaluări
- Godavari Institute of Enginnering and Technology: Image ProcessingDocument15 paginiGodavari Institute of Enginnering and Technology: Image ProcessingAlekhyaÎncă nu există evaluări
- Fast Mobile DepthDocument10 paginiFast Mobile Depthder tupÎncă nu există evaluări
- Zhou Breaking Through The Haze An Advanced Non-Homogeneous Dehazing Method Based CVPRW 2023 PaperDocument10 paginiZhou Breaking Through The Haze An Advanced Non-Homogeneous Dehazing Method Based CVPRW 2023 Paperlohithinfinite154Încă nu există evaluări
- 1 s2.0 S1051200413001929 MainDocument7 pagini1 s2.0 S1051200413001929 MainpradiptamÎncă nu există evaluări
- C-LIENet - A Multi-Context Low-Light Image Enhancement NetworkDocument12 paginiC-LIENet - A Multi-Context Low-Light Image Enhancement NetworkSubhankar Chakraborty ee17b031Încă nu există evaluări
- Carnegie Mellon: Department of Electrical and Computer EngineeringDocument35 paginiCarnegie Mellon: Department of Electrical and Computer Engineeringanunay_scribdÎncă nu există evaluări
- Unit Ii - CCDocument200 paginiUnit Ii - CCjhaa98676Încă nu există evaluări
- Immersive Light Field Video With A LayeredMeshRepresentationDocument15 paginiImmersive Light Field Video With A LayeredMeshRepresentationOoon NattaonÎncă nu există evaluări
- Li Et Al - 2021 - Neural 3D Video SynthesisDocument15 paginiLi Et Al - 2021 - Neural 3D Video SynthesisMiguel Andres AlonsoÎncă nu există evaluări
- Instant 3D Photography: Peter Hedman, Johannes KopfDocument12 paginiInstant 3D Photography: Peter Hedman, Johannes KopfAvinash MallickÎncă nu există evaluări
- Image Compression: Efficient Techniques for Visual Data OptimizationDe la EverandImage Compression: Efficient Techniques for Visual Data OptimizationÎncă nu există evaluări
- Digital Image Processing: Fundamentals and ApplicationsDe la EverandDigital Image Processing: Fundamentals and ApplicationsÎncă nu există evaluări
- The Wonderful Wizard of Oz SummaryDocument14 paginiThe Wonderful Wizard of Oz SummaryRashi AgarwalÎncă nu există evaluări
- Image Segmentation Using Nearest Neighbor Classifier in MatlabDocument16 paginiImage Segmentation Using Nearest Neighbor Classifier in MatlabRashi AgarwalÎncă nu există evaluări
- Machine Learning FunctionalitiesDocument58 paginiMachine Learning FunctionalitiesRashi AgarwalÎncă nu există evaluări
- CSS Stands For Cascading Style SheetsDocument29 paginiCSS Stands For Cascading Style SheetsRashi AgarwalÎncă nu există evaluări
- Module 7Document35 paginiModule 7Rashi AgarwalÎncă nu există evaluări
- HTML FormsDocument31 paginiHTML FormsRashi AgarwalÎncă nu există evaluări
- Remotesensing 02 00591Document20 paginiRemotesensing 02 00591Rashi AgarwalÎncă nu există evaluări
- Ksou SC Business ProposalDocument18 paginiKsou SC Business ProposalmeledathÎncă nu există evaluări
- GIS&EnvDocument11 paginiGIS&EnvRashi AgarwalÎncă nu există evaluări
- ECES 682 Digital Image Processing: Oleh Tretiak ECE Department Drexel UniversityDocument23 paginiECES 682 Digital Image Processing: Oleh Tretiak ECE Department Drexel UniversityRashi AgarwalÎncă nu există evaluări
- Bug Games 2023Document10 paginiBug Games 2023orbit bangdeÎncă nu există evaluări
- Fresher ECE Resume Model 213Document3 paginiFresher ECE Resume Model 213shanky_cs82% (17)
- Thesis On Power Factor ImprovementDocument8 paginiThesis On Power Factor ImprovementBrittany Brown100% (2)
- GMRC AdvertisementDocument11 paginiGMRC AdvertisementSHAH VIRALÎncă nu există evaluări
- BCI-Based Control of Electric Wheelchair Using Fractal Characteristics ofDocument9 paginiBCI-Based Control of Electric Wheelchair Using Fractal Characteristics ofBukong LiÎncă nu există evaluări
- Technology A Boon or A Bane Ojas - Eng - FinalDocument12 paginiTechnology A Boon or A Bane Ojas - Eng - FinalOjasÎncă nu există evaluări
- Analysis and Optimization of Spiral Plate Heat Exchanger Using Computational Fluid DynamicsDocument10 paginiAnalysis and Optimization of Spiral Plate Heat Exchanger Using Computational Fluid DynamicsIJRASETPublicationsÎncă nu există evaluări
- Las WK4Document3 paginiLas WK4Jessa TanÎncă nu există evaluări
- Gesm FDocument2 paginiGesm Fmic.senadÎncă nu există evaluări
- CATALOG. Baotou Steel Seamless ProductsDocument8 paginiCATALOG. Baotou Steel Seamless ProductsEdward R KaolinÎncă nu există evaluări
- PW #01 Resistance MeasurementDocument2 paginiPW #01 Resistance Measurementnetpower19017Încă nu există evaluări
- Marine Transmissions List of Lubricants TE-ML 04Document15 paginiMarine Transmissions List of Lubricants TE-ML 04chao wangÎncă nu există evaluări
- HG6145F GPON Optical Network Terminal Product Manual ADocument38 paginiHG6145F GPON Optical Network Terminal Product Manual AAtila RaphaelÎncă nu există evaluări
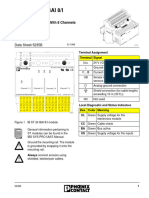
- Ib ST (ZF) 24 Bai 8/I: Analog Input Module With 8 ChannelsDocument24 paginiIb ST (ZF) 24 Bai 8/I: Analog Input Module With 8 ChannelsJosep Giménez CreixellÎncă nu există evaluări
- Remi Butler - 2020 - 1Document2 paginiRemi Butler - 2020 - 1Remi ButlerÎncă nu există evaluări
- Media and Information Literacy Lesson PlanDocument7 paginiMedia and Information Literacy Lesson PlanElenor May Chantal MessakaraengÎncă nu există evaluări
- Human Resources Division: Candidate's Name Vacant Position Date TimeDocument15 paginiHuman Resources Division: Candidate's Name Vacant Position Date TimebawokeÎncă nu există evaluări
- (TM) VRF - DVM S - Installation - GL - ES - 2016 - Ver1.03 Capacitacion Sep 2017 PDFDocument303 pagini(TM) VRF - DVM S - Installation - GL - ES - 2016 - Ver1.03 Capacitacion Sep 2017 PDFwilliam ruizÎncă nu există evaluări
- Flash BloquesDocument13 paginiFlash BloquesJose Alonso CalleÎncă nu există evaluări
- Rapid Miner - Data PreparationDocument17 paginiRapid Miner - Data PreparationanithaaÎncă nu există evaluări
- Shu 2016Document11 paginiShu 2016Usuário1243Încă nu există evaluări
- Instruction Manual: Fusion SplicerDocument89 paginiInstruction Manual: Fusion SplicerIgor SetasÎncă nu există evaluări
- PVAC Tie in Method of StatementDocument8 paginiPVAC Tie in Method of StatementKAY UNAÎncă nu există evaluări
- Angular FrameworkDocument9 paginiAngular Frameworkvarsha dixitÎncă nu există evaluări
- Introduction To The Windows 10 Desktop, Teacher's Lesson PlanDocument2 paginiIntroduction To The Windows 10 Desktop, Teacher's Lesson PlanJyothi Raghu ReddyÎncă nu există evaluări
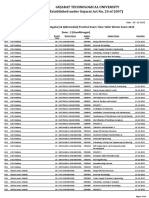
- Gujarat Technological University (Established Under Gujarat Act No. 20 of 2007)Document23 paginiGujarat Technological University (Established Under Gujarat Act No. 20 of 2007)SVKP KADIÎncă nu există evaluări
- DetailedReport Automation Anywhere Enterprise 2 Jul 2020 VeracodeDocument118 paginiDetailedReport Automation Anywhere Enterprise 2 Jul 2020 Veracodetg82770Încă nu există evaluări
- W4540022 - V11 - EN - Service ManualDocument131 paginiW4540022 - V11 - EN - Service ManualBudhi HastomoÎncă nu există evaluări
- Aircon Servicing Singapore ZCRWGDocument5 paginiAircon Servicing Singapore ZCRWGbutaneshoe4Încă nu există evaluări
- Manual Microsoft Excel 2016Document252 paginiManual Microsoft Excel 2016Cesar GarciaÎncă nu există evaluări