S-ar putea să vă placă și
- Simulación 1Document6 paginiSimulación 1Lopex AndrexÎncă nu există evaluări
- Capítulo 2 Planeacion de Los Experimentos de Simulacion en Las ComputadorasDocument13 paginiCapítulo 2 Planeacion de Los Experimentos de Simulacion en Las ComputadorasAngeltaker Hulk ShawÎncă nu există evaluări
- Actividad 6ADocument8 paginiActividad 6AEmmanuelÎncă nu există evaluări
- Unidad 4 SimulacionDocument14 paginiUnidad 4 SimulacionyamoarefiÎncă nu există evaluări
- Instroduccion Al ProModelDocument54 paginiInstroduccion Al ProModelVictor Andrade SotoÎncă nu există evaluări
- Simulador ArenaDocument3 paginiSimulador ArenaMitziÎncă nu există evaluări
- Clase 1 OptimizacionDocument85 paginiClase 1 OptimizacionDeivid Mamani TorresÎncă nu există evaluări
- Presentacion I D - SIS - 19Document192 paginiPresentacion I D - SIS - 19nia corespiÎncă nu există evaluări
- Modelado de SistemasDocument46 paginiModelado de SistemasHarold AriasÎncă nu există evaluări
- Documentación Metodologia ScrumDocument10 paginiDocumentación Metodologia ScrumwellisÎncă nu există evaluări
- Trabajo Semana 4Document6 paginiTrabajo Semana 4Cindy Pintado100% (2)
- Números Aleatorios Uniformes PDFDocument5 paginiNúmeros Aleatorios Uniformes PDFAlexandra Soto RestrepoÎncă nu există evaluări
- Simulador PromodelDocument2 paginiSimulador PromodelSergio BarronÎncă nu există evaluări
- MARCO TEORICO Numeros AleatoriosDocument6 paginiMARCO TEORICO Numeros AleatoriosSelene Diaz RodriguezÎncă nu există evaluări
- Sistemas de RecomendacionDocument15 paginiSistemas de RecomendacionPatricia B. NolbertoÎncă nu există evaluări
- Estrategias de ManufacturaDocument8 paginiEstrategias de ManufacturaWilliam HarveyÎncă nu există evaluări
- 07 SIMULACION de SISTEMAS Simulación de Sistemas de ColasDocument51 pagini07 SIMULACION de SISTEMAS Simulación de Sistemas de ColasDiego MoranÎncă nu există evaluări
- Beneficios de Estándares y ProcedimientosDocument2 paginiBeneficios de Estándares y ProcedimientosMitchel DiazÎncă nu există evaluări
- Diseño de Software de Arquitectura de Tiempo RealDocument18 paginiDiseño de Software de Arquitectura de Tiempo RealFbj JhonÎncă nu există evaluări
- Diapositivas - Sistemas Empresariales de Negocio PDFDocument12 paginiDiapositivas - Sistemas Empresariales de Negocio PDFJorge Mario Toro LozanoÎncă nu există evaluări
- Ensayo Sobre Planeacion y Control de La ManufacturaDocument3 paginiEnsayo Sobre Planeacion y Control de La ManufacturaMarthanell1Încă nu există evaluări
- Actualización en Archivos SecuencialesDocument2 paginiActualización en Archivos SecuencialesAlonso MN0% (1)
- Auditoría de RedesDocument2 paginiAuditoría de RedesNixon PxÎncă nu există evaluări
- Proyecto SimulacionDocument15 paginiProyecto SimulacionAllan Ricardo Hernandez SazoÎncă nu există evaluări
- Proyecto Final Entrega-FlexsimDocument10 paginiProyecto Final Entrega-FlexsimXavier Ligna0% (1)
- Base de Datos para Negocio de CortinasDocument1 paginăBase de Datos para Negocio de CortinasCindy Adriana Bohórquez SantanaÎncă nu există evaluări
- Análisis Comparativo Sobre Los Pasos para Construir Un Modelo de Simulación Según Los Siguientes AutoresDocument4 paginiAnálisis Comparativo Sobre Los Pasos para Construir Un Modelo de Simulación Según Los Siguientes AutoresAlberto Francisco SantosÎncă nu există evaluări
- Modelo y Simulación - Dinamica SistemasDocument27 paginiModelo y Simulación - Dinamica SistemasChristopher Jesús Guerrero CarbajalÎncă nu există evaluări
- Metricas de BangDocument22 paginiMetricas de BangMark IsmÎncă nu există evaluări
- Antecedentes Metodo SimplexDocument8 paginiAntecedentes Metodo SimplexAlejandra Delgado SanchezÎncă nu există evaluări
- Investigacion de La Unidad Unidad 1 - Ing de SoftwareDocument14 paginiInvestigacion de La Unidad Unidad 1 - Ing de SoftwareTerryÎncă nu există evaluări
- Simuladores de Eventos DiscretosDocument40 paginiSimuladores de Eventos Discretosiorifoar0% (1)
- Proyecto Final Del Curso de Teoria General de SistemasDocument38 paginiProyecto Final Del Curso de Teoria General de SistemasChristopher AltamiranoÎncă nu există evaluări
- Aplicaciones de La SimulaciónDocument5 paginiAplicaciones de La SimulaciónLuis Enrique Huerta LauraÎncă nu există evaluări
- Diagrama de Flujo de Datos (DFD)Document13 paginiDiagrama de Flujo de Datos (DFD)José AlfonsoÎncă nu există evaluări
- Capítulo 3 MÉTODOS PARA PROBAR NUMEROS ALEATORIOSDocument23 paginiCapítulo 3 MÉTODOS PARA PROBAR NUMEROS ALEATORIOSSebastián Ignacio Lorca DelgadoÎncă nu există evaluări
- Práctica WekaDocument23 paginiPráctica WekaYael FlorezÎncă nu există evaluări
- Áreas de Aplicación de La Simulación DigitalDocument14 paginiÁreas de Aplicación de La Simulación DigitalAriel Enrique Perez NuñezÎncă nu există evaluări
- Invg Operaciones - 2aed - 02 PDFDocument40 paginiInvg Operaciones - 2aed - 02 PDFCruz Montes Ma de los AÎncă nu există evaluări
- Formulación de Modelos de SimulaciónDocument6 paginiFormulación de Modelos de SimulaciónflfgomezÎncă nu există evaluări
- Elementos de Un Simulador de Eventos DiscretosDocument3 paginiElementos de Un Simulador de Eventos DiscretosJosé Martí SistemasÎncă nu există evaluări
- Simulación de SistemasDocument10 paginiSimulación de SistemasJohanbert MosqueraÎncă nu există evaluări
- Equipo de Trabajo (Reduccion de Tiempo Muerto)Document24 paginiEquipo de Trabajo (Reduccion de Tiempo Muerto)Alain GonzalezÎncă nu există evaluări
- Sesion 1rrDocument99 paginiSesion 1rrPavel EchegarayÎncă nu există evaluări
- Simulacion Papeleria CompletoDocument78 paginiSimulacion Papeleria CompletoCitlalii GarciiaÎncă nu există evaluări
- MOPROSOFTDocument26 paginiMOPROSOFTJavier HdezÎncă nu există evaluări
- PRACTICA Salesiana ANALISIS Y DISEÑO DE SISTEMASDocument4 paginiPRACTICA Salesiana ANALISIS Y DISEÑO DE SISTEMASSergio Quispe Flores100% (1)
- Proyecto SimulaciónDocument47 paginiProyecto SimulaciónJAIR ALONSO GARCIA MENDOZAÎncă nu există evaluări
- Distribucion Muestral de ProporcionesDocument1 paginăDistribucion Muestral de ProporcionesrdsilvaÎncă nu există evaluări
- Proyecto Video Club El Gallo Sampedrano PDFDocument81 paginiProyecto Video Club El Gallo Sampedrano PDFLuis GoQui50% (2)
- Informe de Consultoría, SIMUNDocument16 paginiInforme de Consultoría, SIMUNDaniel Felipe Guzman CantilloÎncă nu există evaluări
- Sistemas de Manufactura Integrada Por ComputadoraDocument20 paginiSistemas de Manufactura Integrada Por ComputadoraKATIA CASTRO ARMENDARIZ0% (1)
- Programacion y SimulacionDocument6 paginiProgramacion y SimulacionLuis Enrique Moncada Toledo100% (1)
- Elementos Del Cim (Computer Integrated Manufacturing)Document6 paginiElementos Del Cim (Computer Integrated Manufacturing)Zurizaday Linares100% (1)
- Proyecto AnylogicDocument28 paginiProyecto AnylogicSoyly SalazarÎncă nu există evaluări
- Practica Diagrama de ForresterDocument19 paginiPractica Diagrama de ForresteralexitamenaÎncă nu există evaluări
- Introducción A La Investigación de Operaciones.Document26 paginiIntroducción A La Investigación de Operaciones.carolina polanco100% (1)
- Taguchi Material Didactico Respaldo 2Document59 paginiTaguchi Material Didactico Respaldo 2Miriiam LópezÎncă nu există evaluări
- Ajuste de Datos Con StatDocument13 paginiAjuste de Datos Con Statdowalos_aÎncă nu există evaluări
- UNIDAD I SIMULACION OkDocument20 paginiUNIDAD I SIMULACION OkArthur Cuatzozon RomanÎncă nu există evaluări
- NTC2462Document86 paginiNTC2462cesar_durangoÎncă nu există evaluări
- Historia de Los NumerosDocument4 paginiHistoria de Los NumerosLiliana ValenzuelaÎncă nu există evaluări
- Formulario Composición CorporalDocument6 paginiFormulario Composición CorporalJosé Luis FloresÎncă nu există evaluări
- Juana Ramírez TirpticoDocument2 paginiJuana Ramírez TirpticoLa Reina Isabel Cacique100% (2)
- Problemas de Reforzamiento-Ultimo TallerDocument3 paginiProblemas de Reforzamiento-Ultimo TallerSaul David Coronel Soto100% (1)
- Dilemas MoralesDocument4 paginiDilemas Moralesmichael hidalgoÎncă nu există evaluări
- Boyer y La Teoría de La RegulaciónDocument3 paginiBoyer y La Teoría de La RegulaciónLautaro LazarteÎncă nu există evaluări
- Centro Municipal Distrito Sur - Rosa Ziperovich - Ciudad de Rosario - Monografi PDFDocument5 paginiCentro Municipal Distrito Sur - Rosa Ziperovich - Ciudad de Rosario - Monografi PDFFernando AriasÎncă nu există evaluări
- Conducción de Calor en Los SolidosDocument6 paginiConducción de Calor en Los SolidosdanteunmsmÎncă nu există evaluări
- Aprovechamiento de Residuos Solidos Organicos DomesticosDocument13 paginiAprovechamiento de Residuos Solidos Organicos DomesticosSusannaCastroÎncă nu există evaluări
- Analisis Caso LucatoDocument16 paginiAnalisis Caso LucatoRichard MoyaÎncă nu există evaluări
- Guía A RealizarDocument23 paginiGuía A RealizarFabrizio ArratiaÎncă nu există evaluări
- Comparativo Salones de FiestasDocument6 paginiComparativo Salones de FiestasAnny SfmÎncă nu există evaluări
- Parque La LloviznaDocument2 paginiParque La LloviznaEfren J Aliendres L100% (1)
- Las Ideas Son Capitales Que Solo GananDocument2 paginiLas Ideas Son Capitales Que Solo GananCristal Dagger OrozcoÎncă nu există evaluări
- Documento Resumen 4Document8 paginiDocumento Resumen 4Neowancis Perez OgandoÎncă nu există evaluări
- Formulario Validación Centro PrácticaDocument1 paginăFormulario Validación Centro PrácticaDanilo VegaÎncă nu există evaluări
- L 0012863810 PDFDocument11 paginiL 0012863810 PDFSumak KawsayÎncă nu există evaluări
- Manejo Integrado de Nematodos y Control BiologicoDocument7 paginiManejo Integrado de Nematodos y Control BiologicoPaola AlcocerÎncă nu există evaluări
- Indicadores CinemáticosDocument5 paginiIndicadores CinemáticosLup BelloÎncă nu există evaluări
- Neurosis Postmoderna Análisis PsicoculturalDocument22 paginiNeurosis Postmoderna Análisis PsicoculturalRosa CerqueiroÎncă nu există evaluări
- Test Asertividad de Rathus ManualDocument3 paginiTest Asertividad de Rathus Manualcompras.abecapÎncă nu există evaluări
- Enrocado Del Talud y La Uña de Cimentacion Del DiqueDocument5 paginiEnrocado Del Talud y La Uña de Cimentacion Del DiqueAlejandro TeránÎncă nu există evaluări
- Tarea FinalDocument7 paginiTarea FinalvalladaresrcÎncă nu există evaluări
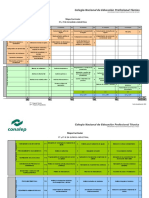
- Mapa Curricular Quimica IndustrialDocument2 paginiMapa Curricular Quimica IndustrialGerard JuarezÎncă nu există evaluări
- Ficha de Monitoreo Al Docente - 2023Document5 paginiFicha de Monitoreo Al Docente - 2023Daniel Palomino100% (3)
- Bar - La Prueba de Rorschach. Un Manual de Aplicación PluriculturalDocument146 paginiBar - La Prueba de Rorschach. Un Manual de Aplicación PluriculturalDaniel Alejandro AlzateÎncă nu există evaluări
- EjersiciosDocument9 paginiEjersiciosMeister YassirÎncă nu există evaluări
- Unidad I Introducción A Las Plantas Eléctricas y CalderasDocument9 paginiUnidad I Introducción A Las Plantas Eléctricas y CalderasMax Cotera PalaciosÎncă nu există evaluări
- Manual Gestiona 3.0Document131 paginiManual Gestiona 3.0Helder Gutiérrez100% (3)