S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- My Notes On Long Term Memory Storage Capacity of Multi Connected Neural NetworksDocument4 paginiMy Notes On Long Term Memory Storage Capacity of Multi Connected Neural NetworksAmir Hesam SalavatiÎncă nu există evaluări
- Learning, in Variance, and Generalization in High-Order Neural NetworksDocument7 paginiLearning, in Variance, and Generalization in High-Order Neural NetworksAmir Hesam SalavatiÎncă nu există evaluări
- My Notes On The Subspace Learning Algorithm As A Formalism For Pattern Recognition and Neural NetworkDocument4 paginiMy Notes On The Subspace Learning Algorithm As A Formalism For Pattern Recognition and Neural NetworkAmir Hesam SalavatiÎncă nu există evaluări
- My Notes On Learning, in Variance, and Generalization in High-Order Neural Networks"Document2 paginiMy Notes On Learning, in Variance, and Generalization in High-Order Neural Networks"Amir Hesam SalavatiÎncă nu există evaluări
- My Notes On "The Null Space Problem II. Algorithms"Document3 paginiMy Notes On "The Null Space Problem II. Algorithms"Amir Hesam SalavatiÎncă nu există evaluări
- Expander CodesDocument13 paginiExpander CodesAmir Hesam SalavatiÎncă nu există evaluări
- My Notes On "Expander Codes"Document5 paginiMy Notes On "Expander Codes"Amir Hesam SalavatiÎncă nu există evaluări
- My Notes On Expander Graph Arguments For Message Passing AlgorithmsDocument3 paginiMy Notes On Expander Graph Arguments For Message Passing AlgorithmsAmir Hesam SalavatiÎncă nu există evaluări
- My Notes On DNA Hyper Networks For Information Storage and RetrievalDocument4 paginiMy Notes On DNA Hyper Networks For Information Storage and RetrievalAmir Hesam SalavatiÎncă nu există evaluări
- 6th Central Pay Commission Salary CalculatorDocument15 pagini6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 1KHW001492de Tuning of ETL600 TX RF Filter E5TXDocument7 pagini1KHW001492de Tuning of ETL600 TX RF Filter E5TXSalvador FayssalÎncă nu există evaluări
- Thermal Physics Lecture 1Document53 paginiThermal Physics Lecture 1Swee Boon OngÎncă nu există evaluări
- Tec066 6700 PDFDocument2 paginiTec066 6700 PDFExclusivo VIPÎncă nu există evaluări
- Music Production EngineeringDocument1 paginăMusic Production EngineeringSteffano RebolledoÎncă nu există evaluări
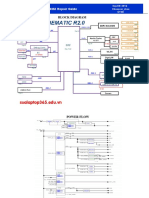
- Asus x453Document5 paginiAsus x453Rhiry Ntuh AthryÎncă nu există evaluări
- Current Harmonics: Electric Power System Power QualityDocument3 paginiCurrent Harmonics: Electric Power System Power QualityAlliver SapitulaÎncă nu există evaluări
- New Presentation-Group AuditingDocument23 paginiNew Presentation-Group Auditingrajes wariÎncă nu există evaluări
- Electronics 11 02566Document13 paginiElectronics 11 02566卓七越Încă nu există evaluări
- Coke Drum Repair Welch Aquilex WSI DCU Calgary 2009Document37 paginiCoke Drum Repair Welch Aquilex WSI DCU Calgary 2009Oscar DorantesÎncă nu există evaluări
- 2.ed - Eng6 - q1 - Mod3 - Make Connections Between Information Viewed and Personal ExpiriencesDocument32 pagini2.ed - Eng6 - q1 - Mod3 - Make Connections Between Information Viewed and Personal ExpiriencesToni Marie Atienza Besa100% (3)
- Punches and Kicks Are Tools To Kill The Ego.Document1 paginăPunches and Kicks Are Tools To Kill The Ego.arunpandey1686Încă nu există evaluări
- Guidelines For Doing Business in Grenada & OECSDocument14 paginiGuidelines For Doing Business in Grenada & OECSCharcoals Caribbean GrillÎncă nu există evaluări
- FIREBASE Edited PresentationDocument12 paginiFIREBASE Edited PresentationNiraj MirgalÎncă nu există evaluări
- Physiol Toric Calculator: With Abulafia-Koch Regression FormulaDocument1 paginăPhysiol Toric Calculator: With Abulafia-Koch Regression FormuladeliÎncă nu există evaluări
- Lecture 19 Code Standards and ReviewDocument27 paginiLecture 19 Code Standards and ReviewAdhil Ashik vÎncă nu există evaluări
- Densha: Memories of A Train Ride Through Kyushu: By: Scott NesbittDocument7 paginiDensha: Memories of A Train Ride Through Kyushu: By: Scott Nesbittapi-16144421Încă nu există evaluări
- French Cuisine RecipeDocument6 paginiFrench Cuisine RecipeJimmy AchasÎncă nu există evaluări
- Sociology A Brief Introduction Canadian Canadian 5th Edition Schaefer Test Bank DownloadDocument44 paginiSociology A Brief Introduction Canadian Canadian 5th Edition Schaefer Test Bank DownloadJohn Blackburn100% (20)
- Pyromet Examples Self StudyDocument2 paginiPyromet Examples Self StudyTessa BeeÎncă nu există evaluări
- Joomag 2020 06 12 27485398153Document2 paginiJoomag 2020 06 12 27485398153Vincent Deodath Bang'araÎncă nu există evaluări
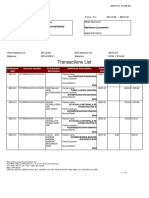
- Transactions List: Marilena Constantin RO75BRDE445SV93146784450 RON Marilena ConstantinDocument12 paginiTransactions List: Marilena Constantin RO75BRDE445SV93146784450 RON Marilena ConstantinConstantin MarilenaÎncă nu există evaluări
- ACC030 Comprehensive Project April2018 (Q)Document5 paginiACC030 Comprehensive Project April2018 (Q)Fatin AkmalÎncă nu există evaluări
- Diagnosis ListDocument1 paginăDiagnosis ListSenyorita KHayeÎncă nu există evaluări
- The One With The ThumbDocument4 paginiThe One With The Thumbnoelia20_09Încă nu există evaluări
- Investigation Data FormDocument1 paginăInvestigation Data Formnildin danaÎncă nu există evaluări
- Catalogo PukangDocument41 paginiCatalogo PukangClarita Muller LeigueÎncă nu există evaluări
- Initial Police Report: Calamba City Police Station Brgy Real, Calamba City, Laguna E-Mail: 545-1694/545-6789 Loc 8071Document1 paginăInitial Police Report: Calamba City Police Station Brgy Real, Calamba City, Laguna E-Mail: 545-1694/545-6789 Loc 8071Jurish BunggoÎncă nu există evaluări
- Rdramirez Aota 2018 Poster For PortfolioDocument1 paginăRdramirez Aota 2018 Poster For Portfolioapi-437843157Încă nu există evaluări
- EPMS System Guide For Subcontractor - V1 2Document13 paginiEPMS System Guide For Subcontractor - V1 2AdouaneNassim100% (2)
- Properties of WaterDocument23 paginiProperties of WaterNiken Rumani100% (1)