S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- MG DC PDF 0182Document250 paginiMG DC PDF 0182kushÎncă nu există evaluări
- Cadic Catalogue 2018 PDFDocument27 paginiCadic Catalogue 2018 PDFChiito Vidal100% (1)
- (A214) 897998 H PM Us en (06 2006)Document812 pagini(A214) 897998 H PM Us en (06 2006)Adam Lee100% (4)
- 18 0567 - AAAFTS ADAS Potential Benefits Brief - v2Document10 pagini18 0567 - AAAFTS ADAS Potential Benefits Brief - v2Peeyush KumarÎncă nu există evaluări
- MRT-X 1840 Easy 400°Document5 paginiMRT-X 1840 Easy 400°Reynaldo CaballeroÎncă nu există evaluări
- 5-Speed Manual Gearbox 0A4 Jetta Golf 2005 2011 PDFDocument210 pagini5-Speed Manual Gearbox 0A4 Jetta Golf 2005 2011 PDFrodandoÎncă nu există evaluări
- TechNIx MRP List Nov 22Document59 paginiTechNIx MRP List Nov 22Ambak PradhanÎncă nu există evaluări
- 14X Meritor Service ManualDocument113 pagini14X Meritor Service Manualeloyabner100% (8)
- 206 Vehicle Lighting and Fueling GuideDocument173 pagini206 Vehicle Lighting and Fueling GuideEmre YükselÎncă nu există evaluări
- Cars Reading ComprehensionDocument1 paginăCars Reading ComprehensionChan PhakkdeyÎncă nu există evaluări
- 85 Monte Carlo WiringDocument31 pagini85 Monte Carlo Wiringdustyboner0% (1)
- Toyota FDZN20-30 forklift specsDocument4 paginiToyota FDZN20-30 forklift specsrahna pristiÎncă nu există evaluări
- Chevrolet Europe Case StudyDocument5 paginiChevrolet Europe Case StudyBonnie SalamatosÎncă nu există evaluări
- Alternator Catalog 20171582682690632Document122 paginiAlternator Catalog 20171582682690632warmman suhayaÎncă nu există evaluări
- Me463 Automobile Engneering-Important QuestionsDocument3 paginiMe463 Automobile Engneering-Important QuestionsVarsha SreekumarÎncă nu există evaluări
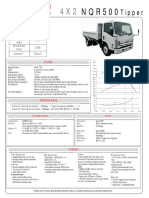
- 4X2 NQR500 Tipper Specs & FeaturesDocument2 pagini4X2 NQR500 Tipper Specs & FeaturesHugo RodriguezÎncă nu există evaluări
- JTEKT Letter To The U.S. Department of CommerceDocument8 paginiJTEKT Letter To The U.S. Department of CommerceAnnaBrutzmanÎncă nu există evaluări
- Universal Joint Application Chart PDFDocument1 paginăUniversal Joint Application Chart PDFROYALÎncă nu există evaluări
- Directechs DirectWire - Quick Print - 2013 Lexus LX 570 (Smart Key)Document1 paginăDirectechs DirectWire - Quick Print - 2013 Lexus LX 570 (Smart Key)Erwin HernandezÎncă nu există evaluări
- Katalog Dílů RKS 125 150 - GS Engine - 2011 Ver - 131031Document181 paginiKatalog Dílů RKS 125 150 - GS Engine - 2011 Ver - 131031VictorÎncă nu există evaluări
- Transaxle & Transmission: SectionDocument196 paginiTransaxle & Transmission: SectionTESA MOTORSÎncă nu există evaluări
- FedWorldReport PDFDocument1.177 paginiFedWorldReport PDFHugo Bañuelos100% (2)
- Gaikindo 2Document3 paginiGaikindo 2Kholis WatiÎncă nu există evaluări
- Mechanical Engineering Companies in GermanyDocument6 paginiMechanical Engineering Companies in Germany21-Syed Ihtasham Javaid ShahÎncă nu există evaluări
- VSTAR Full Car Models DatabaseDocument65 paginiVSTAR Full Car Models DatabaseMarx RedzÎncă nu există evaluări
- Manitou MRT Privilege Plus (EN)Document32 paginiManitou MRT Privilege Plus (EN)ManitouÎncă nu există evaluări
- Banner Power BullDocument3 paginiBanner Power Bullanon_579800775Încă nu există evaluări
- Study - Id26959 - Car Sales in Spain Statista DossierDocument125 paginiStudy - Id26959 - Car Sales in Spain Statista DossierfadÎncă nu există evaluări
- Operating Manuals - MaestralDocument10 paginiOperating Manuals - Maestralbillytheblack67Încă nu există evaluări
- Subaru Outback: More User Manuals OnDocument27 paginiSubaru Outback: More User Manuals OnLeonel Jara AlarcónÎncă nu există evaluări