Documente Academic
Documente Profesional
Documente Cultură
Algebre Lineaire
Încărcat de
manzi1210Titlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Algebre Lineaire
Încărcat de
manzi1210Drepturi de autor:
Formate disponibile
Mathmatiques 4
Algbre linaire
Par M. Tendayi Chihaka
African Virtual university
Universit Virtuelle Africaine
Universidade Virtual Africana
ur|ve(s|l \|(lue||e Al(|ca|re 1
Note
Ce document est publi sous une licence Creative Commons.
http://en.wikipedia.org/wiki/Creative_Commons
Attribution
http://creativecommons.org/licenses/by/2.5/
License (abrviation cc-by ), Version 2.5.
ur|ve(s|l \|(lue||e Al(|ca|re 2
I. Mathmatiques de niveau 4, Algbre linaire _____________________3
II. Prrequis/connaissances pralables ncessaires __________________3
III. Volume horaire/temps ______________________________________3
IV. Matriel didactique _________________________________________3
V. Justification/importance du module ____________________________4
VI. Contenu _________________________________________________4
6.1 Aperu________________________________________________4
6.2 Grandes lignes _________________________________________5
6.3 Reprsentation graphique _________________________________6
VII. Objectif gnral ___________________________________________7
VIII. Objectifs spcifiques aux activits dapprentissage ________________7
IX. Activits dapprentissage ____________________________________8
X. Concepts-cls (glossaire) ___________________________________14
XI. Lectures obligatoires ______________________________________15
XII. Ressources obligatoires ____________________________________15
XIII. Liens utiles ______________________________________________16
XIV. Activits dapprentissage ___________________________________18
XV. Synthse du module _______________________________________68
XVI. valuation sommative ______________________________________69
XVII. Rfrences bibliographiques ________________________________82
Table des maTires
ur|ve(s|l \|(lue||e Al(|ca|re 3
i. mathmatiques de niveau 4,
algbre linaire
parMr. Tendayi Chihaka, Universit du Zimbabwe
ii. Prrequis/ connaissances pralables
ncessaires
Unit 1: Matrices et transformations linaires
Lapprentissage des mathmatiques enseigns au secondaire est une condition
pralable.
Ceci est un cours de niveau 1.
Unit 2: Applications des matrices
Lapprentissage de lalgbre linaire 1 est une condition pralable.
Ceci est un cours de niveau 2.
iii. Volume horaire
120 heures
iV. matriel didactique
Les matriels didactiques pour ce module sont :
Les matriels dtude (imprims, CD, en ligne)
(outils de pr-valuation inclus dans la catgorie matriel dtude)
Deux activits dvaluation formative par unit (toujours disponibles, mais
comportant des dates particulires de remise). (CD, en ligne)
Rfrences et lectures de sources libres de droit (CD, en ligne)
Fichiers dactivit des TIC (technologies de linformation et de la commu-
nication) :
ur|ve(s|l \|(lue||e Al(|ca|re 1
- Reposant sur des logiciels dauteur
- Reposant sur des logiciels libres
- Fichiers indpendants
- Fichiers vido
- Fichiers audio (avec une version cassette)
- Fichiers dinstallation de logiciels libres.
Calculatrices graphiques et logiciels licencis lorsque accessibles.
(Note: les dtails exacts seront spcifs lorsque les activits seront termines.)
V. Justifcation du module
Ltude de lalgbre linaire va vous quiper avec les connaissances de base
requises et la comprhension vous permettant denseigner des sujets tels que les
quations linaires et leurs solutions, les vecteurs et les oprations sur les vecteurs,
les matrices et les oprations sur les matrices. De plus, lapprentissage vous aidera
raliser les connections densemble entre ces sujets et appliquer ce savoir dans
lenseignement de la gomtrie et de la mcanique des symtries.
Vi. Contenu
6.1 Aperu
La prsentation gnrale du contenu de cette unit va, dans la mesure du possible,
de la reprsentation concrte des concepts vers leur forme abstraite.
LUnit 1 commence avec le traitement des systmes dquations linaires et leurs
solutions. Ce traitement est suivi par une section prsentant les vecteurs et les
matrices et sattarde beaucoup sur les oprations sur ces derniers et la thorie et
les proprits des dterminants. Ensuite est abord le concept relativement plus
abstrait despace vectoriel. Cette unit sachve avec la thorie et les proprits
des transformations linaires.
LUnit 2 prsente les notions de valeur propre et de vecteur propre. La proprit
de diagonalisation est dmontre et prouve.
Chaque unit comprend un maximum de quatre activits, dont lune est axe sur
lenseignement des mathmatiques, la pdagogie et la didactique. Cela aide les
lves-professeurs non seulement se concentrer sur le contenu mathmatique,
mais aussi garder en tte leurs buts en tant quenseignants en mathmatiques
lcole secondaire.
ur|ve(s|l \|(lue||e Al(|ca|re 5
6.2 Grandes lignes
Unit 1: Matrices et transformations linaires (80 heures/35 heures)
Niveau 1. Priorit A. Pas de prrequis
Espaces vectoriels sur R.(12/5)
Sous-espaces vectoriels. (10/4)
Indpendance linaire. (8/3)
Bases et dimension. (8/3)
Matrices. (10/4)
Transformations linaires et leurs matrices. (12/4)
Dterminants. (8/3)
Systmes dquations linaires. (12/4)
Unit 2: Applications des matrices (40 heures/35 heures)
Niveau 2. Priorit B. Algbre Linaire 1 est un prrequis.
Valeurs propres et vecteurs propres. (8/7)
Polynmes minimaux. (8/7)
Formes linaires. (8/7)
Formes quadratiques et bilinaires. (8/7)
Matrices et oprateurs orthogonaux. (8/7)
ur|ve(s|l \|(lue||e Al(|ca|re
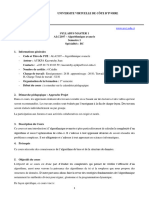
6.3 Reprsentation graphique
Ce diagramme montre comment les diffrentes sections de ce module sont re-
lies.
Le concept central est au centre du diagramme (en rouge).
Les concepts qui dpendent les uns des autres sont relis par une ligne.
Par exemple : Espace vectoriel est le concept central. Les vecteurs dpendent
dun Espace vectoriel. Les valeurs propres et vecteurs propres dpendent de
Vecteurs.
Valeurs propres
et vecteurs
propres
Application
linaire
Espace vectoriel Vecteurs
Matrices
Equations
linaires
ur|ve(s|l \|(lue||e Al(|ca|re Z
Vii. Objectifs gnraux
Vous devriez tre quip avec la connaissance des espaces vectoriels, des matrices,
des applications linaires, des dterminants et leurs applications appropries, y
compris ce qui est ncessaire pour enseigner ces sujets avec confance au niveau
de lcole secondaire.
Vous allez acqurir une connaissance sre des contenus des mathmatiques
scolaires pour pouvoir enseigner ces sujets avec confance au niveau de lcole
secondaire.
Vous allez acqurir une connaissance des technologies de linformation et de la
communication pour pouvoir amliorer lenseignement et lapprentissage des
mathmatiques scolaires.
Viii. Objectifs dapprentissage spcifques
(objectifs pdagogiques)
Vous devriez tre capable de :
Dmontrer une comprhension des concepts d'espaces et sous-espaces vec-
toriels, des systmes d'quations linaires, des matrices, des transformations
linaires, des dterminants et leurs applications, des valeurs propres et vec-
teurs propres, des formes linaires, des formes bilinaires et quadratiques,
des matrices orthogonales et des oprateurs orthogonaux.
Dterminer la dpendance ou l'indpendance linaire d'un ensemble de
vecteurs dans un espace vectoriel donn.
Trouver la base et la dimension d'un espace vectoriel.
Identifer et dcrire une application linaire.
Calculer avec des matrices.
Dterminer les conditions et la nature des solutions de systmes d'quations
linaires.
Trouver le dterminant de matrices.
Vous devriez amliorer votre connaissance des mathmatiques scolaires
dans les domaines suivants :
Vecteurs.
Systmes d'quations
Matrices et leurs inverses (2 2)
Dterminants
Applications gomtriques linaires
Trouver la matrice pour une application linaire donne
ur|ve(s|l \|(lue||e Al(|ca|re 8
iX. activits denseignement et dapprentissage
9.1 Pr-valuation
Titre de la pr-valuation : Concepts de base de lalgbre linaire.
Justifcation : ce pr-test a pour but de :
Tester la sret des connaissances de base des lves-professeurs en algbre
linaire, qui sont fondes sur leurs connaissances pralables de mathma-
tiques l'cole secondaire.
Trouver les forces et les faiblesses des diffrents lves-professeurs en
algbre linaire, de faon guider les dveloppeurs du programme sur le
savoir que les lves-professeurs possdent au dbut du cours.
Questions
Algbre linaire
Pr-test
1. La solution ce systme dquations est :
1
2 3 7
x y
x y
+ =
+ =
A. (-5,4)
B. (4,-5)
C. (-4,5)
D. (-4,-5)
2. Le systme suivant :
2 3
3 6 9
x y
x y
+ =
+ =
A. pas de solution
B. une seule solution
C. De nombreuses solutions
D. Zro solutions
ur|ve(s|l \|(lue||e Al(|ca|re 9
3. La longueur du vecteur :
5
12
Est :
A.
( ) 17
B. 13
C. 7
D. 60
4. Quelle proposition na pas de solution ?
A.
3
4
6
+
4
0
0
B.
2
3
+
1
4
2
C.
0
1
0
1
0
0
D.
4
6
+
2
3
ur|ve(s|l \|(lue||e Al(|ca|re 10
5. Quelle proposition na pas de solution ?
A.
2 3 1 2 2
2 1 0 3 7
4 5 1 4 5
X
B.
[ ]
7 1
2 3 1 4 3
2 1
C
a x x
c d z
D. Aucune des rponses ci-dessus
6. Quelle matrice ne possde pas de dterminant ?
A
a b
c d
B.
1 2
4 8
C.
1 3 5
6 4 1
D.
0 8 7
7 1 9
5 6 4
ur|ve(s|l \|(lue||e Al(|ca|re 11
7. Linverse de la matrice
2 5
2
1
5
En vertu de la multiplication, est :
A.
1 5
2
2
5
B.
2 5
2
1
5
C.
0 0
0 0
D. Nexiste pas.
8 La matrice reprsentant une rotation de 90 vers la gauche lorigine cor-
respond :
A.
0 1
1 0
B.
1 0
1 0
C.
1 0
0 1
D.
1 1
0 1
ur|ve(s|l \|(lue||e Al(|ca|re 12
9. La matrice reprsentant une symtrie daxe dquation y=x est :
A.
0 1
1 0
B.
1 0
0 1
C.
1 1
0 1
D.
Cos60 sin60
sin60 cos60
10. La matrice reftant un facteur dagrandissement de k, de centre (0,0) est :
A
k k
k k
B.
0 k
k 0
C.
k 0
0 1
D. k
1 0
0 1
ur|ve(s|l \|(lue||e Al(|ca|re 13
Rponses :
1. C
2. C
3. B
4. B
5. D
6. C
7. A
8. A
9. A
10. D
Commentaire pdagogique pour les lves-professeurs
(100-200 mots)
Cette pr-valuation a pour but de vrifer votre connaissance des concepts fon-
damentaux de lalgbre linaire, acquise lcole primaire et secondaire. Vous
devriez facilement passer le cap !
Si vous obteniez un score de moins de 8, nous vous conseillons de revoir srieu-
sement vos connaissances du secondaire sur ce sujet, et de rviser avec un ami
ou un professeur de secondaire parmi vos collgues.
Idalement, cependant, le contenu de ce test est si fondamental et lmentaire
quun score de moins de 10 devrait tre une cause de proccupation srieuse...
BONNE CHANCE !!
ur|ve(s|l \|(lue||e Al(|ca|re 11
X. Concepts-cls (glossaire)
Utilisez Wikipdia pour une dfnition dtaille de ces termes. Allez sur : http://
fr.wikipedia.org/wiki/Main_page et tapez le terme dans la bote de recherche.
quation linaire
Variables, Constantes
quation non-linaire
Systme d'quations linaires
Systme homogne
Systme cohrent
Systme incohrent
Solution triviale
Solution non triviale
Vecteur
Addition de vecteur
Multiplication par un scalaire
Ingalit triangulaire
Matrice
Oprations sur les lignes
Mthode de Gauss
Thorme de Gauss
Forme chelonne
Variable libre
Paramtre
Paramtrer
Matrice
Vecteur nul
Matrice inversible
Produit scalaire
Longueur d'un vecteur
Thorme de l'ingalit triangulaire
Thorme de l'ingalit de Cauchy-Schwarz
Forme chelonne rduite
quivalence des lignes
limination de Gauss-Jordan
Matrice inversible
Dterminant
Expansion par permutation
Application multilinaire
Permutation de N
Fonction signe
Paralllpipde
Expansion de Laplace
Adjonction
Rgle de Cramer
ur|ve(s|l \|(lue||e Al(|ca|re 15
Xi. lectures obligatoires
Lecture n1
Rfrence complte :
Linear Algebra par Jim Hefferon Mathematics, Saint Michaels College, Col-
chester, Vermont USA 05439, 2006
Rfrence Web : http://joshua.smcvt.edu
Rsum/Justifcation : Un manuel dalgbre linaire complet en open-source. Ce
livre couvre toutes les exigences de ce cours. Au sein des activits dapprentissage
les lves-professeurs seront dirigs vers diffrentes pages de rfrence pour des
lectures, des activits et des exercices complmentaires.
Notez quil ny a quune lecture obligatoire car celle-ci est un manuel complet,
couvrant lensemble du cours.
Xii. ressources obligatoires
Ressource n1
wxMaxima. Il sagit dun Systme de Calcul Formel. Veuillez noter que le
logiciel est au moins partiellement en anglais. Vous devez double-cliquer sur
le fchier Maxima_Setup pour lancer linstallation. Suivez les instructions pour
installer le logiciel. Diffrentes versions seront installes. Nous allons toujours
utiliser la version wxMaxima, veillez choisir celle-ci. Vous y trouverez une
introduction gnrale des maxima dans le module Intgrer les TIC et les Maths
(Integrating ICT and Maths). Cependant, il existe un manuel complet disponible
pour le logiciel. Pour le trouver, lancez wxMaxima et choisissez Maxima help
dans le menu Help. Le site web de ce logiciel est http://maxima.sourceforge.net.
Parcourez lactivit 3 pour voir comment faire vos premiers pas en utilisant wx-
Maxima pour les oprations de matrice.
ur|ve(s|l \|(lue||e Al(|ca|re 1
Xiii. liens utiles
The Linear Algebra Toolkit (site visit le 07.11.06)
http://www.math.odu.edu/~bogacki/cgi-bin/lat.cgi?c=sys
Ce site montre une solution complte par matrice tout systme d'quations
linaires que vous y entrez.
Choisissez le nombre d'quations et le nombre d'inconnues, cliquez sur
NEXT.
Entrez les coeffcients, cliquez sur NEXT.
Vrifez soigneusement la mthode de rsolution.
Wolfram MathWorld (site visit le 07.11.06)
http://mathworld.wolfram.com/LinearSystemofEquations.html
Lisez cette page sur les systmes linaires.
Suivez les liens claircissant les concepts spcifques, au besoin.
Wikipedia (site visit le 07.11.06)
http://en.wikipedia.org/wiki/System_of_linear_equations
Lisez cette page sur les systmes linaires.
Suivez les liens claircissant les concepts spcifques, au besoin.
MacTutor History of Mathematics (site visit le 07.11.06)
http://www-history.mcs.st-andrews.ac.uk/Indexes/HistoryTopics.html
Parcourez les sujets sur l'histoire des quations linaires.
The Linear Algebra Toolkit (site visit le 07.11.06)
http://www.math.odu.edu/~bogacki/cgi-bin/lat.cgi?c=det
Explorez les dterminants avec ce programme.
Wolfram MathWorld (site visit le 07.11.06)
http://mathworld.wolfram.com/Determinant.html
Lisez cette page sur les dterminants
Suivez les liens claircissant les concepts spcifques, au besoin.
ur|ve(s|l \|(lue||e Al(|ca|re 1Z
Wikipedia (site visit le 07.11.06)
http://en.wikipedia.org/wiki/Determinant
Lisez cette page sur les dterminants
Suivez les liens claircissant les concepts spcifques, au besoin.
MacTutor History of Mathematics (site visit le 07.11.06)
http://www-history.mcs.st-andrews.ac.uk/HistTopics/Matrices_and_determinants.html
Explorez l'histoire des matrices et des dterminants.
ur|ve(s|l \|(lue||e Al(|ca|re 18
XiV. activits dapprentissage
Unit 1: Matrices and transformations linaires
Activits dapprentissage
Activit 1: Systmes linaires
1. Objectifs
la fn de cette activit, vous devriez tre capable de :
Dfnir une quation linaire
Faire la distinction entre une quation linaire et une quation non li-
naire
Dfnir un systme dquation linaire
Dfnir un systme homogne dquation linaire
Utiliser la notation approprie pour reprsenter un systme d'quations
linaires
Rsoudre des quations linaires et de distinguer les systmes non com-
patibles et compatibles
Utiliser l'limination de Gauss-Jordan pour rsoudre des systmes dqua-
tions linaires
Dfnir un vecteur
Effectuer des additions vectorielles et des multiplications scalaires de
vecteurs
Trouver la longueur dun vecteur et de prouver lingalit du triangle
noncer et dmontrer l'ingalit de Cauchy-Schwartz
Dfnir une matrice
Reprsenter des quations linaires sous forme matricielle
Effectuer des oprations de ligne sur les matrices
Rsoudre des quations linaires en utilisant la mthode de rduction de
Gauss-Jordan
ur|ve(s|l \|(lue||e Al(|ca|re 19
1.1 Glossaire
Utilisez Wikipdia pour une dfnition dtaille de ces termes. Allez sur : http://
fr.wikipedia.org/wiki/Main_page et tapez le terme dans la bote de recherche.
quation linaire
Variables, Constantes
quation non linaire
Systme d'quations linaires
Systme homogne
Systmes non compatibles
Systmes compatibles
Solutions triviales
Solutions non triviales
Vecteur
Addition de vecteur
Multiplication scalaire
Ingalit triangulaire
Matrice
Forme chelonne
Mthode de Gauss
Thorme de Gauss
Variables libres
Paramtres
Paramtrer
Vecteur nul
Matrice inversible
Produit scalaire
Longueur d'un vecteur
Thorme de l'ingalit triangulaire
Thorme de l'ingalit de Cauchy-Schwarz
Forme chelonne
quivalence des lignes
limination de Gauss-Jordan
ur|ve(s|l \|(lue||e Al(|ca|re 20
1.2 Rsum de lactivit dapprentissage
Dans cette activit, nous allons explorer les concepts et la nature des quations
linaires, leurs systmes et proprits, leurs solutions et la nature de leurs solutions.
Nous poursuivrons ensuite par la prsentation de la thorie des matrices lmen-
taires et ses applications dans la rsolution de systmes dquations linaires. La
dernire partie traite de lintroduction la thorie des dterminants. Cette activit
forme la base dune tude plus pousse de lalgbre linaire.
1.3a Lecture obligatoire
Toutes les lectures pour le module proviennent dun manuel en Open Source. Ceci
signife que lauteur a rendu le contenu disponible tous, gratuitement. Nous vous
fournissons une copie complte du manuel dans le CD accompagnant de cours.
Le manuel est :
Linear Algebra par Jim Hefferon
Mathematics, Saint Michaels College, Colchester, Vermont USA 05439, 2006
Rfrence Web: http://joshua.smcvt.edu
1.3b Internet et Ressources logicielles
Pour le cours dAlgbre linaire, nous vous fournissons une copie dun logiciel
open source. Vous pouvez utiliser ce logiciel loisir, gratuitement. Assurez-vous
de linstaller sur un ordinateur auquel vous avez accs rgulirement. Le logiciel
met votre disposition des outils vous permettant dexplorer les mathmatiques en
gnral, y compris des outils mathmatiques puissants pour lalgbre linaire.
Utilisez ce logiciel aussi souvent que possible, pour pouvoir vous familiariser
avec son utilisation.
1. wxMaxima. Ceci est un systme dalgbre informatis (SAI). Cliquez sur
licne Maxima_Setup. Suivez les instructions pour installer le logiciel. Diff-
rentes versions seront installes, nous utiliserons toujours la version nomme
wxMaxima. Faites attention de choisir la bonne. Vous trouverez une introduction
gnrale Maxima dans le module Intgrer les TIC et les Maths. Cependant, un
manuel complet du logiciel est disponible. Pour le trouver, lancer wxMaxima et
choisissez Maxima help dans le menu daide, Help. Le site internet de ce logiciel
est http://maxima.sourceforge.net. Reportez-vous lactivit 3 pour voir comment
dbuter dans lutilisation de mxMaxima pour la rsolution des oprations de
matrice.
Note: Vous ne devez pas utiliser wxMaxima pour rpondre aux exercices votre
place ! Vous devriez plutt essayer dutiliser diffrents exemples de calculs et
doprations pour vous assurer que vous comprenez comment elles marchent,
pour que vous soyez plus mme de les faire sans le soutien du logiciel.
ur|ve(s|l \|(lue||e Al(|ca|re 21
Rfrences Web
The Linear Algebra Toolkit (site visit le 07.11.06)
http://www.math.odu.edu/~bogacki/cgi-bin/lat.cgi?c=sys
Ce site montre une solution matrice complte de tout systme d'quations
linaires que vous y entrez.
Choisissez le nombre d'quations et le nombre d'inconnues, cliquez sur
NEXT.
Entrez les coeffcients, cliquez sur NEXT.
Vrifez soigneusement par la mthode de solution.
Wolfram MathWorld (site visit le 07.11.06)
http://mathworld.wolfram.com/LinearSystemofEquations.html
Lisez cette page sur les systmes linaires.
Suivez les liens claircissant les concepts spcifques, au besoin.
Wikipedia (site visit le 07.11.06)
http://en.wikipedia.org/wiki/System_of_linear_equations
Lisez cette page sur les systmes linaires.
Suivez les liens claircissant les concepts spcifques, au besoin.
MacTutor History of Mathematics (site visit le 07.11.06)
http://www-history.mcs.st-andrews.ac.uk/Indexes/HistoryTopics.html
Explorez l'histoire des quations linaires.
ur|ve(s|l \|(lue||e Al(|ca|re 22
1.4 Introduction
Considrons les scnarios suivants :
Vous tes le professeur de Mathmatiques du village et deux personnes viennent
vous consulter, Mme Nhau qui tient un restaurant, et M. Kondo, lherboriste du
village.
M. Kondo produit deux types de potions de sant, Rudo et Zwanamina. Pour
prparer un kilo de Rudo, M. Kondo passe 20 minutes sur le pilon et le mortier,
et 16 minutes sur la meule. Pour un kilo de Zwanamina, il passe 16 minutes sur
le pilon et le mortier et 8 minutes sur la meule. Il doit emprunter le mortier, le
pilon et la meule un collgue herboriste qui lui prte le mortier et le pilon pour
6 heures et la meule pour 4 heures. Combien de kilos de chaque type de potion
lui recommandez-vous de prparer afn de profter au maximum de lquipement
emprunt ?
Mme Nhau tient un restaurant qui produit un plat fait partir des aliments X, Y
et Z.
Chaque kilo de X contient 4 parts de protines, 6 parts de lipides et 8 parts de
glucides.
Chaque kilo de Y contient 3 parts de protines, 2 parts de lipides et 1 part de
glucides.
Chaque kilo de Z contient 3 parts de protines, 3 parts de lipides et 2 parts de
glucides.
Les responsables de la sant lui ont dit que le repas doit apporter exactement 25
parts de protines, 24 parts de lipides et 21 parts de glucides. Quel dosage dali-
ments de chaque type lui conseillez-vous pour que son plat rponde aux attentes
en termes de sant ?
FAITES CECI : Considrons les cas de M. Kondo et Mme Nhau.
1. Vous devez trouver des relations et des connexions dans lnonc. Quelles
sont ces relations ?
2. Vous devez trouver les reprsentations mathmatiques de ces connexions
et conseiller les deux commerants en consquence.
Quel avis avez-vous donn ?
3. Quelles sont les diffrences majeures entre les deux scnarios, sil y en a
?
4. Quelles sont les diffcults que vous avez rencontres lorsque vous avez
conseill ces deux personnes, sil y en a eu ?
5. Avez-vous demand laide dun ami, dun collgue pour lun des deux
problmes ? Lequel, et pourquoi ?
ur|ve(s|l \|(lue||e Al(|ca|re 23
1.5 quations
Depuis lcole primaire, on nous demande de trouver des inconnues dans des
situations donnes. Vous devez ici penser aux nombreux exemples et occurren-
ces o vous avez eu trouver des inconnues. Les problmes que vous aviez
rsoudre pour les inconnues taient appels quations et les inconnues
appeles variables.
De manire plus spcifque, nous tions aussi capable de reprsenter ces quations
par une ligne (ou plusieurs) dans un plan x-y sous la forme de :
b y a x a = +
2 1
Plus gnralement, nous dfnissons une quation Linaire dun nombre n de
variables n
x x x x ,...... ,
3 2 1 comme pouvant tre exprime par :
b x a x a x a
n n
= + + + ......
2 2 1 1
O n
a a a ,......, ,
2 1 et b sont des constantes.
Ci-dessous, plusieurs exemples dquations linaires :
3x + 4y =8, y=
4
2
1
+ x
,
7 4 2 3
4 3 2 1
= + + x x x x
FAITES CECI : lequel des suivants serait similaire, sil y en a, aux quations
drive des deux problmes ci-dessus.
Vous remarquerez que la puissance la plus leve de lune des variables est 1.
Ceci signife quil ny a pas de produit daucune des variables.
Les quations qui suit ne sont pas linaires :
xy = 4,
6 , 1 sin , 7 2
3 2 1
2
= + + = = + x x x x y y x
Trouver la valeur de linconnue, ou rsoudre lquation, cest trouver la solution
de lquation linaire.
Ainsi, la solution de :
7 2
1
= + x
Est le numro 5, tel que
5
1
= x
Plus prcisment, une solution de lquation
b x a x a x a
n n
= + + + ......
2 2 1 1
ur|ve(s|l \|(lue||e Al(|ca|re 21
est lensemble des nombres
n
c c c ,......, ,
2 1 tels que
b c a c a c a
n n
= + + + ......
2 2 1 1
Voici des exemples :
Trouver lensemble des solutions de :
5 7 (b)
, 1 4 3 (a)
3 2 1
= +
= +
x x x
y x
Ceci est assez diffrent de ce dont vous avez lhabitude, nest-ce pas ? Pourquoi ?
Vous pourriez ventuellement discuter avec un ami ou un collgue des solutions
aux quations ci-dessus.
1.5.1 Systmes dquations linaires.
Vous avez aussi rencontr des situations o vous tiez cens rsoudre, par exem-
ple, les quations suivantes :
x + y = 1
2x + y = 3
Cest--dire que vous deviez trouver les valeurs de x et y qui satisfaisaient aux
deux quations.
Quand on a plus dune quation linaire rsoudre, on dit que lon a un sys-
tme dquations linaires, ou un systme linaire. Plus gnralement, un
systme de m quations linaires ayant n inconnues est reprsent comme ceci :
b x a x a x a
b x a x a x a
b x a x a x a
= + +
= + +
= + +
...... .
.
.
.
......
......
ur|ve(s|l \|(lue||e Al(|ca|re 25
FAITES CECI : crivez la 4me et la ime quation.
Une squence de nombres n
s s s ,...... ,
2 1 est appele une solution du systme si
n n
s x s x s x = = = ,......, ,
2 2 1 1 pour toutes les quations du systme.
Tous les systmes nont pas de solutions. Si le systme na pas de solution, il est
dit incompatible. Sil a une solution il est appel systme compatible.
Si b b b = = = ...... , le systme est appel systme homogne.
Si
0 ......
2 1
= = = =
n
x x x
est la solution dun systme homogne, elle est
appele la rponse vidente, ou triviale.
La solution un systme homogne dans lequel lun
0
'
s i
x
est appele solution
non-triviale.
FAITES CECI : Maintenant, il vous faut rechercher les solutions aux paires
dquations suivantes en deux variables, et donner leur interprtation gomtri-
que.
Rsolvez les systmes suivants :
(a) 2x + 3y = 5
2x - y = 4
Rsolvez chaque paire dquation en utilisant lalgbre.
Rsolvez ensuite chaque paire en construisant un
graphique.
(b) x + 2y = 3
2x + 4y = 5
(c) 2x - y = 1
4x - 2y = 2
FAITES CECI : Lequel de ces systmes dquations a une solution, lequel na
pas de solution, et lequel a une infnit de solutions ?
ur|ve(s|l \|(lue||e Al(|ca|re 2
1.5.2 Systmes quivalents.
On dit de deux systmes quils sont quivalents sils ont tous les deux exactement
les mmes solutions.
Considrez par exemple les systmes suivants :
7 3
7 2
2 1
2 1
=
= +
x x
x x
Et
7 5
7 3 8
0 2 3
2 1
2 1
2 1
=
=
=
x x
x x
x x
FAITES CECI : Ces systmes sont-ils quivalents ? Vrifez cette affrmation.
FAITES CECI : Vous devrez vrifez les affrmations suivantes sur les systmes
quivalents en utilisant les quations :
3x + 2y = 5
2x + y = 6
Principes des systmes quivalents
tant donn un systme dquations,
(i) intervertir deux quations
(ii) la multiplication par une constante non-nulle et
(iii) Lajout dun multiple dune quation une autre quation produit un
systme quivalent dquations.
ur|ve(s|l \|(lue||e Al(|ca|re 2Z
1.6 limination de Gauss-Jordan
Vous vous rappellerez des nombreuses mthodes que vous avez employes pour
rsoudre des systmes dquations alors appels quations simultanes. Au
premier rang des mthodes fgurait la mthode dlimination par laquelle vous
cherchiez liminer lune des variables.
Essayez de dcrire le procd que vous utilisiez.
Maintenant utilisez la mme mthode sur le systme dquations suivant :
x - 2y + 3z = 9.1
y + 3z = 5..2
z = 2...3
Facile ! Pourquoi ?
Vous navez pas eu utiliser dlimination, puisque du 3 vous connaissiez la
valeur de z et tout ce que vous aviez besoin de faire tait une substitution pour
les autres quations.
Ce systme forme ce que lon appelle une forme chelonne de ligne, ce qui
signife quil suit un format en escalier et a des coeffcients principaux de 1.
Cependant, tous les systmes ne sont pas exprims sous cette forme.
1.6.1 Exemple
x 2y + 3z = 9.. 1
R
-
x +3y = 4 .. 2
R
=
i
R
ligne i
2x - 5y + 5z =17 . 3
R
Lexemple doit tre rduit sa forme quivalente de forme chelonne sur les
lignes avant quil ne devienne facile rsoudre. (Pas ici, bien que la substitution
puisse aussi tre utilise en rduisant ces quations en quations impliquant y et
z). On doit utiliser un procd systmatique qui puisse facilement tre appliqu
aux systmes possdant plus de variables.
En partant du coin gauche et en utilisant 1
R
, nous avons :
3 3
4 1 2 2
1 1
) (
R R
R R R R
R R
ur|ve(s|l \|(lue||e Al(|ca|re 28
Lisez ceci :
La ligne 1 dans la ligne 1
La ligne 2 dans la ligne 2, plus la ligne 1 deviennent la ligne 4
Cette ligne reste la ligne 3.
Ainsi :
x 2y + 3z = 9 . 1
R
y + 3z = 5 . 4
R
2x - 5y + 5z = 17... 3
R
) )( 2 (
) 5 1 3 3
4 4
1 1
R R R R
R R
R R
+
x - 2y + 3z = 9.. 1
R
y + 3z = 5.. 4
R
-
y z = -1 . 5
R
) ( R R R R
R R
R R
+
x +2y - 3z = 9 1
R
y + 3z = 5.. 4
R
2z = 4 . 6
R
) (
2
1
7 6 6
4 4
1 1
R R R
R R
R R
ur|ve(s|l \|(lue||e Al(|ca|re 29
x - 2y + 3z = 9 .. 1
R
y + 3z = 5 4
R
z = 2.. 7
R
Qui est lquivalent en forme chelonne de notre systme.
Une substitution nous donne comme rsultat x=1, y=1, z=2.
ASTUCE : Puisquil est facile de commettre des erreurs avec cette mthode, il
est prudent de confrmer que cest bien la solution de lquation en substituant
les valeurs de x, y et z dans le systme original.
1.6.2 Exemple
Rsolvez :
3 2 1
2 3 1
1 3 2
..... .......... .......... .......... .......... 1 3
..... .......... .......... .......... .......... 1 3
........ .......... .......... .......... .......... 0
R x x
R x x
R x x
= +
=
=
3 3
5 1 2
4 2 1
) ....(
) ....(
R R
R R R
R R R
3 2 1
5 3 2
4 3 1
...... .......... .......... .......... 1 3
. .......... .......... .......... .......... 0
.... .......... .......... .......... 1 3
R x x
R x x
R x x
= +
=
=
) ....(
6 4 3 3
5 5
4 4
R R R R
R R
R R
+
6 3 2
5 3 2
4 3 1
...... .......... .......... .......... 0 3 3
.......... .......... .......... .......... 0
..... .......... .......... .......... 1 3
R x x
R x x
R x x
=
=
=
ur|ve(s|l \|(lue||e Al(|ca|re 30
) )....( 3 (
7 5 6 6
5 5
4 4
R R R R
R R
R R
+
7
5 3 2
4 3 1
.. .......... .......... .......... .......... .......... 0 0
........ .......... .......... .......... 0
... .......... .......... .......... 1 3
R
R x x
R x x
=
=
=
7
R
devient inutile, il nous faut donc nous en dbarrasser !
5 3 2
4 3 1
5 5
4 4
. .......... .......... 0
..... .......... 1 3
R x x
R x x
R R
R R
=
=
Nous choisissons de laisser 3
x
tre la variable libre (indpendante)
Ainsi 3 2
x x =
Et
1 3
3 1
= x x
Donc 3
x
peut devenir nimporte quel nombre rel s et donc
1 3
1
2
3
=
=
=
s x
s x
s x
Ceci montre que ce systme a une infnit de solutions.
Considrons le systme dquations suivant :
ur|ve(s|l \|(lue||e Al(|ca|re 31
1.6.3 Exemple
Rsolvez :
3 3
4 ..... )......... 1 2 ( 2 2
1 1
3 ......... 1 3 2
2 .. .......... 2 2 2
1 ... .......... 1 3
3 2 1
3 2 1
3 2 1
R R
R R R R
R R
R x x x
R x x x
R x x x
= +
+
= +
5 .... )......... 1 ( 3 3
4 4
1 1
3 .. .......... .......... 1 3 2
4 .......... .......... .......... 0 4 5
1 .... .......... .......... 1 3
R R R R
R R
R R
R x x x
R x x
R x x x
+
= +
=
= +
5 ...... .......... 2 4 5
4 ........ .......... 0 4 5
1 ... .......... 1 3
3 2
3 2
3 2 1
R x x
R x x
R x x x
=
=
= +
6 ...... .......... .......... .......... 2 0
4 ......... .......... 0 4 5
1 ..... .......... 1 3 3
6 ... )......... 4 ( 5 5
4 4
1 1
3 2
2 1
R
R x x
R x x x
R R R R
R R
R R
=
=
= +
+
=
ur|ve(s|l \|(lue||e Al(|ca|re 32
1.6.4 Discussion
Nous avons donc trouv un systme quivalent, qui a t rduit une absurdit,
et nous en concluons que le systme na pas de solution.
Vous aurez remarqu que dans cette activit il y a certaines questions se poser,
certaines astuces garder en tte lorsque lon mathmatise des problmes. Vous
devez toujours vous poser la question de savoir pourquoi est-ce que vous faites
certaines choses lors de la rsolution dun problme. Pourquoi, par exemple,
devons-nous interchanger les lignes lors dune limination de Gauss-Jordan ?
Pourquoi devons-nous transformer seulement une quation la fois ? Nest-il
pas possible dinterchanger une ligne et de transformer toutes les autres la fois ?
Quelles sont les consquences si on le fait ? Et ctera, et ctera
Dans les activits suivantes, la plupart des consignes ont t laisses de ct et
la place, rfrence est faite aux matriels et lectures mises votre disposition.
Nous esprons que vous suivrez les astuces ci-dessus et continuerez vous poser
les questions qui vous feront comprendre et conceptualiser les mathmatiques de
manire intressante. BONNE CHANCE !
ce stade, je vais vous initier au message du paragraphe prcdent en utilisant
votre manuel principal Linear Algebra par Jim Hefferon, qui est un manuel
ouvert quon peut trouver sur Internet.
Vous remarquerez que certaines des ides discutes ci-dessus seront rptes dans
la section suivante mais dans le format de votre manuel principal. Nous vous
conseillons vivement de vous familiariser avec la notation utilise dans le texte
et dtre capable de le relier dautres indications dans les diffrentes sources
que vous rencontrerez lors de votre tude.
1.7 Rsoudre des systmes linaires
Lectures et exemples pp1- 8
Rduction de Gauss I.1 p2
Dfnition 1.1 p2
1.7.1 quation linaire, coeffcients, constantes, systme dquations linaires.
Note importante :
Notez la correction
a
1
,.......a
n
, d , and(s
1
, s
2
.....s
n
)
n
dans la dfnition.
Thorme 1.4 p3 mthode de rduction de Gauss
Dfnition 1.5 p4; oprations de rduction lmentaires ou oprations
de ligne ou oprations Gaussiennes. changer, pivoter, multiplier par un
scalaire ou faire un changement dchelle.
Note Importante:
ur|ve(s|l \|(lue||e Al(|ca|re 33
Notez le changement de la notation R1 pour ligne un dans la section pr-
cdente pour le caractre grec
1
dans le texte et vous pouvez vous charger
de plus d'une opration de ligne si vous y arrivez !
Dfnition 1.9 p5 variable dominante, forme chelonne
FAITES CECI :
Exercices 1.16- 1.17. L'exercice 1.18 vous renvoie vos cours du lyce et
procure une lecture trs intressante
Exercice 1.21, 1.25. Faites les exercices 1.26 -1.29, 1.35- 1.37 avec un
collgue
(RPONSES : P1-12)
1.7.2 Dcrire lensemble solution
Lecture et exemples p11-18
Note importante :
Veuillez noter l'utilisation des termes paramtre et paramtrer en p. 13 qui
seront utiliss trs souvent dans le texte.
Dfnition 2.2 variables libres
Dfnition 2.6 p13 matrice nxn
Dfnition 2.8 vecteur, vecteur colonne, vecteur ligne, composantes; 2.9;
2.10 somme vectorielle; 2.11 multiplication par un scalaire p15
FAITES CECI :
Exercices 2.15- 2.21, 2.22, 2.26 pp 18-20
(RPONSES : P12-16)
1.7.3 Gnral = Particulier + Homogne
Thorme 3.1 p21
Dfnition 3.2 p21 quation homogne
Dfnition 3.4 p22 vecteur nul
Lemme 3.7 p22
Lemme 3.8 p24
Corollaire 3.11 p26 ensemble de solution
Note Importante :
La table p.27 est trs utile car elle rsume les facteurs affectant la taille d'une
solution gnrale.
Dfnition 3.12 p27 matrice inversible et non inversible
ur|ve(s|l \|(lue||e Al(|ca|re 31
FAITES CECI :
Exercice 3.15- 3.20 p29-31
Faites 3.31-3.25 avec un collgue
(RPONSES : P16-19)
1.7.4 Gomtrie linaire dun espace de dimension n
Lecture et exemples p32-37
FAITES CECI :
Exercices1.1- 1.7 p37
(RPONSES : P20-21)
1.7.5 Longueur et mesures dangle
Lecture et exemples p39-42
Dfnition 2.1 p39 Longueur d'un vecteur
Dfnition 2.3 p40 Le produit scalaire, ou produit scalaire de deux vec-
teurs.
Thorme 2.5 p40 L'ingalit du triangle
Corollaire 2.6 p41 L'ingalit de Cauchy-Schwartz
Dfnition 2.7 L'angle entre deux vecteurs
Note Importante :
Lisez attentivement la dfnition des vecteurs orthogonaux p42.
FAITES CECI :
Exercices 2.10, 2.12. p42-45
Faites les exercices 2.17, 2.28, 2.25, 2.32, 2.38, 2.39 avec un collgue.
(RPONSES : P22-26)
ur|ve(s|l \|(lue||e Al(|ca|re 35
1.8 Forme chelonne rduite
1.8.1 Rduction de Gauss-Jordan
Lecture et exemples p46-51
Dfnition 1.3 p47 Forme chelonne rduite
Lemme 1.4, 1.5 p50
Dfnition 1.6 p50 quivalence des lignes des matrices
FAITES CECI :
Exercices complets 1.7-1.13 p51 avec un collgue
(RPONSES : P27-29)
1.8.2 quivalence des lignes
Lecture et exemples p52- 5.9
Dfnition 2.1 p52 Combinaison linaire
Lemme 2.2 p52 lemme de la Combinaison linaire
Corollaire 2.3 p53
Lemme 2.5 p55
Lemme 2.6 p56
Thorme 2.7 p57
FAITES CECI :
Exercices 2.11, 2.19. p59
Faites les exercices 2.24-2.28 avec un collgue.
(RPONSES : P29-33)
1.9 Synthse
Dans cette activit vous avez appris les dfnitions et proprits des concepts de
base des quations et des systmes dquations. Vous avez russi trouver et ca-
tgoriser les solutions en utilisant diffrentes mthodes, et plus particulirement la
rduction de Gauss-Jordan. Vous devriez maintenant tre famili avec les notions
basiques de vecteurs et matrices ainsi quavec les oprations correspondantes, et
vous devriez pouvoir les appliquer dans les activits qui suivent.
ur|ve(s|l \|(lue||e Al(|ca|re 3
Activit 2 : Les espaces vectoriels
2. Objectifs
la fn de cette activit, vous devriez tre capable de :
Dfnir un vecteur et noter sa forme gnrale.
Examiner les conditions pour lgalit de deux vecteurs.
Additionner des vecteurs et effectuer des multiplications par des scalaires
sur des vecteurs.
Prouver les thormes et lois qui guident les deux oprations de laddition
de vecteur et la multiplication par un scalaire, et rsolvent les problmes
lis.
Dfnir et noncer ce que lon veut dire par espace vectoriel et tous ses
axiomes.
Dterminer si un ensemble donn et deux oprations forment un espace
vectoriel.
Utiliser les axiomes despace vectoriel pour montrer les caractristiques
importantes des espaces vectoriels.
Dfnir et noncer ce que lon veut dire par sous-espace vectoriel.
Faire la liste et utiliser les conditions dun sous-espace pour dterminer si
un sous-ensemble despace vectoriel est un sous-espace.
Trouver la base et la dimension dun espace vectoriel donn.
Dfnir et dterminer la transpose dune matrice donne.
Trouver la somme directe de sous-espaces donns.
1.1 Glossaire
Utilisez Wikipedia pour une dfnition exhaustive de ces termes. Allez sur http://
fr.wikipedia.org/wiki/Accueil et tapez le terme dans la bote de recherche.
Espace vectoriel
Espace vectoriel trivial
Sous-espace
Espace engendr
Combinaison linaire
Indpendance linaire
Dpendance linaire
Base
Dimension
Espace des lignes
Rang des lignes
ur|ve(s|l \|(lue||e Al(|ca|re 3Z
Espace des colonnes
Rang des colonnes
Transposition
Somme des sous-espaces
Concatnation
Somme directe
2.2 Introduction
Dans cette activit nous allons explorer un important aspect de lalgbre linaire :
lespace vectoriel. Lide despace vectoriel est centrale dans le cours dalgbre
linaire, puisque tout ce qui a t vu avant cette activit et tout ce qui la suivra
dpend de la comprhension totale de ce concept. Une comprhension claire
et complte de la notion et de la structure dun champ abordes dans le cours
Algbre de Base, est essentielle pour que vous puissiez bnfcier pleinement
de cette activit.
Nous continuons ensuite en explorant le comportement des sous-ensembles des-
paces vectoriels subissant les mmes oprations dfnies dans lespace vectoriel,
qui sont des espaces vectoriels eux-mmes, pour ressortir la structure essentielle,
appele sous-espace, qui hrite des mmes proprits quun espace vectoriel.
Mais pour commencer, voici un problme introduisant lune des composantes
essentielles dun espace vectoriel.
Voici plusieurs problmes pour vous et vos amis :
Une voiture part de Nairobi et roule une vitesse moyenne de 120 km/h.
O est la voiture aprs une heure ?
Un avion part de Nairobi et vole une vitesse moyenne de 600 km/h. O
est l'avion aprs une heure ?
1. Discutez de toutes les informations dont vous auriez
besoin pour pouvoir rsoudre les deux problmes.
2. O sont les mots-cls ncessaire pour rsoudre les
deux problmes ?
3. Quelles sont, s'il y en a, les diffrences fondamen-
tales physiques ou conceptuelles entre les deux problmes ?
Dans cette activit, nous commenons par dfnir et reprsenter le concept de
vecteur. Elle est suivie par des reprsentations algbriques et gomtriques de
laddition de vecteurs et de multiplication par un scalaire. Les proprits
de base de ces oprations seront examines. Un vecteur a t dfni dans le
plan dimensionnel comme une paire ordonne de membres, soit comme une
matrice 2x1. Similairement un vecteur dans lespace a t dcrit comme un
triplet ordonn de nombres rels ou comme une matrice 3x1. Dans un espace
n-dimensions ou espace-n, un vecteur a t dcrit comme un multiple n. En
ur|ve(s|l \|(lue||e Al(|ca|re 38
pratique, dans des matires comme la physique, nous avons dfni un vecteur
comme une entit qui possde amplitude et direction, ou comme un segment de
droite avec une direction.
Nous avons donc de nombreuses diffrentes manires de conceptualiser un vec-
teur, et les avons toutes appeles vecteurs. Le seul intrt commun dans des
conceptions, cest le comportement du vecteur. Cette activit porte sur les rgles
et les proprits qui structurent ce comportement.
2.3 Ressources Internet et logicielles
Rfrences Web :
The Linear Algebra Toolkit (site visit le 07.11.06)
http://www.math.odu.edu/~bogacki/cgi-bin/lat.cgi
Ceci est la page de menu. Il existe de nombreux outils pour s'exercer avec
les espaces vectoriels. Utilisez ces outils pour aider vrifer votre com-
prhension dans les activits.
Wolfram MathWorld (site visit le 07.11.06)
http://mathworld.wolfram.com/VectorSpace.html
Lisez cette entre sur les espaces vectoriels.
Suivez les liens pour obtenir plus d'informations sur des concepts spcif-
ques, selon vos besoins.
Wikipedia (site visit le 07.11.06)
http://en.wikipedia.org/wiki/Vector_space
Lisez cette entre sur les espaces vectoriels.
Suivez les liens pour obtenir plus d'informations sur des concepts spcif-
ques, selon vos besoins.
MacTutor History of Mathematics (site visit le 07.11.06)
http://www-history.mcs.st-andrews.ac.uk/HistTopics/Abstract_linear_spaces.html
Lisez, pour votre culture personnelle, propos de l'histoire du dveloppe-
ment des espaces linaires abstraits.
Note : Vous aurez besoin de votre copie de Linear Algebra par Jim Hefferon,
pour toute lactivit 2.
ur|ve(s|l \|(lue||e Al(|ca|re 39
2.4 Espaces vectoriels
2.4.1 Dfnition dun espace vectoriel.
Lecture et exemples lis pg79-87.
Dfnition 1.1 p80 Espace vectoriel
Vous devriez suivre attentivement les exemples 1:3 1:5, qui examine la faon
de dterminer quun ensemble donn possdant deux oprations dfnies forme
ou non un ensemble vectoriel.
Notez en particulier les exemples 1.11, 1.9, 1.8, qui montrent que le concept
despaces vectoriels nest pas seulement confn lensemble de vecteurs et ses
oprations lies, mais aux autres ensembles aussi.
FAITES CECI :
Vous devriez essayer avec un collgue de russir tous les exercices sans
solution dans la section prcdente.
Exercices : p88-90 1.18 (c-d) 1.19 (b-c) 1.20 (b) 1.25 * 1.44 (a)
(RPONSES : P39-42)
2.4.2 Sous-espaces et Espaces engendrs
Lectures et exemples p91-97
Dfnition : 2.1 p91 Sous-espaces
Lemme 2.9 p93
Dfnition 2.13 p95 Espace engendr ou clture linaire
Note Importante :
Dans d'autres textes utilisant des symboles mathmatiques stricts, l'espace en-
gendr d'un espace vectoriel, Sp(S) est dfni comme tel :
Si
S V
et
S = x
i
{ }
alors par l'espace engendr de S on veut dire que
y Sp S ( )
tel que
y = a
i
x
i
. Vous aurez peut-tre besoin de vous fami-
liariser avec une telle notation puisque vous allez certainement la rencontrer de
nouveau en lisant d'autres textes sur le mme sujet.
Lemme 2.13 p95
ur|ve(s|l \|(lue||e Al(|ca|re 10
FAITES CECI :
Exercice 2.20 - 2.47 p 97
(RPONSES : P42- 48)
Commentaire
Lexercice 2.42 donne de trs intressantes notions sur la construction des sous-
espaces et les oprations sur les sous-espaces, et nous y prouvons et donnons la
rponse certains des problmes soulevs par la question :
2.42(a). Si A et B sont des sous-espaces dun espace vectoriel V, est-ce que
B A
doit tre un sous-espace de V? Toujours ? Parfois ? Jamais ?
Rponse
Si A et B sont des sous-espaces, alors ils sont des espaces vectoriels eux aussi, donc
. , , , . , B w Aandv w Bthenv A w Ifv B A henceO B AandO O
Ainsi nimporte quelle combinaison linaire
B w v Aand w v + +
puisque A et B sont des sous-espaces. Ainsi
. B A w v +
On en dduit
que
B A
est un sous-espace de V.
En gnral, lintersection dun nombre quelconque de sous-espaces dun espace
vectoriel V est un sous-espace.
2.4.3 Indpendance linaire
Lectures et exemples p101 108
Lemme 1.1 p101
Dfnition 1.3 p 103 Indpendance linaire, dpendance linaire
Lemme 1.4
Note Importante :
Vous aurez remarqu que nous avons uniquement utilis les conditions que
O A B
et que toute combinaison linaire de deux vecteurs dans A et B est
aisso leir intersection pour prouver que que l'intersection est un espace vectoriel.
Ce sont des conditions suffsantes pour pouvoir prouver qu'un sous-ensemble
donn d'un espace vectoriel est un sous-espace.
ur|ve(s|l \|(lue||e Al(|ca|re 11
Note importante :
Vous devriez noter que le Lemme en 1.4 est celui donn en tant que dfnition
d'indpendance linaire dans d'autres textes. Remarquez aussi que les diffrences
entre Dfnition, Thormes et Lemme est simplement une question de choix. La
dfnition doit tre prise telle quelle et utilise en tant que ligne directrice. Tho-
rmes et Lemmes prennent la dfnition comme un problme et la prouvent
Thorme 1.12 p104
FAITES CECI :
Prouver le Lemme 1.14 p105
Note Importante :
La table en page 107 is un outil usuel qui rsume les proprits dindpendance
et de dpendance et les relations de sous-ensembles et de super ensembles.
FAITES CECI : :
Faites les exercices 1.18-1.41 p108-114
(RPONSES : P48-55)
2.4.4 Bases et dimensions
Lectures et exemples p112- 122
Lectures et exemples p112-116
Dfnition 1.1 p112 Base
Dfnition 1.5 p113 Base standard
Thorme 1.12 p114
Dfnition 1.13 p115 reprsentation
FAITES CECI :
Faites les exercices : 1.16 -1.34 p116-118
(RPONSES : P55-59)
ur|ve(s|l \|(lue||e Al(|ca|re 12
2.4.5 Dimension
Lectures et exemples p118-122
Dfnition 2.1 p119 Espace de dimension fnie
Lemme 2.2 p119 Lemme dchange.
Thorme 2.3 p119
Dfnition 2.4 p120 Dimension
Corollaire 2.8 p120
Corollaire 2.11 p121
FAITES CECI :
Exercices 2.14- 2.18 p122-123
Faites les exercices 2.22, 2.24, 2.31, 2.33, avec un collgue.
(RPONSES : 60-62)
2.4.6 Espaces vectoriels et systmes linaires
Lectures et exemples p123-128
Dfnition : 3.1 p124 Espace des lignes, rang des lignes
Lemme 3.3, 3.4 p124
Dfnition 3.6 p125 Espace des colonnes, rang des colonnes
Dfnition 3.8 p126 Matrice transpose
FAITES CECI :
Examinez la transformation qui fait correspondre la matrice A en
trans
A avec un
collgue :
A=
0 6 5 1
4 3 2 1
,
=
0 4
6 3
5 2
1 1
trans
A
Est-il possible de le faire partir de vos connaissances sur la gomtrie des
transformations ?
ur|ve(s|l \|(lue||e Al(|ca|re 13
Espaces vectoriels et Systmes Linaires (Seconde partie)
Lemme 3.10
Thorme 3.11 Rang des lignes = Rang des colonnes
Dfnition. 3.12 p12
Thorme 3.13 p128
Corollaire 3.15 p128
FAITES CECI :.
Exercice p129-130 3.16- 3. 21
Faites 3.30, 3.34, 3.37, 3.38 avec un collgue
(RPONSES : P63-67)
2.4.7 Combiner les sous-espaces
Lectures et exemples p131-136
Dfnition 4.1 p131 Somme de sous-espaces
Dfnition 4.7 Concatnation de suites
Lemme 4.8 p133
Dfnition 4.9, Sous-espaces indpendants, 4.10 Somme directe de sous-
espaces, p135
Corollaire 4.13 p135
Dfnition 4.14 p135 Complments
Lemme 4.15 p135
FAITES CECI :
Exercices 4.20, 4.25, 4.31 p136-139
Faites 4.40, 4.38, 4.40, 4.43 avec un collgue.
(RPONSES :P68-71)
2.5 Synthse
Cette activit a prolong vos notions de base des vecteurs et vous a prsent une
nouvelle structure, lespace vectoriel et ses axiomes ncessaires. Les sous-en-
sembles despaces vectoriels et les sous-espaces ont aussi t introduits, et leurs
proprits ont t explores. Vous devriez maintenant tre familiers avec les pro-
prits de ces espaces comme les bases et dimensions et les utiliser pour rsoudre
des problmes connexes, et prouver lemmes, thormes et leurs corollaires.
Arms de cette connaissance, vous devriez maintenant tre prt explorer les
correspondances et les transformations au sein de lespace vectoriel et entre les
espaces.
ur|ve(s|l \|(lue||e Al(|ca|re 11
Activit 3:
Transformations Linaires, applications entre Espaces
3.0 Objectifs
A la fin de cette activit, vous devriez tre capable de :
Prciser ce qu'on entend par une application entre deux espaces
Dfnir et distinguer un isomorphisme et un homomorphisme
Dterminer et indiquer si une application donne est une application li-
naire ou une transformation linaire.
Prouver que limage et le noyau dune application linaire sont des sous-
espaces de leurs espaces vectoriels respectifs.
Reprsenter des cartes linaires avec des matrices.
Calculer le vecteur de coordonnes dun lment par rapport une base
donne de lespace vectoriel.
crivez la matrice de la transformation par rapport une base donne.
Trouver des applications composes entre les espaces et leurs reprsenta-
tions en matrices.
Effectuer des oprations d'addition, de soustraction, de multiplication
par un scalaire et de multiplication de matrices.
Trouver l'inverse dune matrice donne.
3.1 Glossaire
Utilisez Wikipdia pour des dfnitions exhaustives de ces termes. Allez sur :
http://fr.wikipedia.org/wiki/Accueil et tapez le terme dans la bote de recherche.
Isomorphisme
Homomorphisme
Application linaire
Transformation linaire
Espace image
Espace vectoriel nul (ou trivial)
Noyau
Rang du noyau
Application non injective
Somme
Produit scalaire
ur|ve(s|l \|(lue||e Al(|ca|re 15
Multiplication de matrices
Matrice d'unit
Matrice d'identit
Matrice diagonale
Matrice de permutation
Matrice non inversible
quivalence matricielle
Projection orthogonale
Orthogonalisation de Gram-Schmidt
Base orthogonale
Supplmentaire orthogonal
3.2 Introduction
Dans cette activit nous allons nous intresser aux applications sur les espaces
vectoriels que nous avons explores dans lactivit prcdente. Nous concentre-
rons nos efforts sur les applications qui prservent les oprations sur les espaces
vectoriels, telle laddition de vecteurs et la multiplication par un scalaire.
Ces applications sont appels applications linaires, ou transformations li-
naires.
Dans le premier module vous vous tes familiaris avec le concept dapplications
ou de fonctions liant des ensembles, et avec les diffrentes faons de les dcrire,
injective et surjective, correspondance injective etc. Nous lions ces concepts
ceux disomorphisme et de dhomomorphisme.
Nous continuons pour montrer que ces reprsentations linaires sur les espaces
vectoriels de dimension fnie sont essentiellement des matrices, de sens que
ltude des applications linaires est ltude des matrices.
Une famille consiste en les membres suivants :
Le pre, Masenge
La mre, Maria
2 fls, Tendayi et Paul
3 flles, Anesu, Memory et Rudo.
Discutez avec un collgue sur toutes les relations existant entre les membres de la
famille. Par exemple est la mre de est une relation entre Maria et Memory.
ur|ve(s|l \|(lue||e Al(|ca|re 1
Le pre trouve un nouveau travail dans une autre ville et la famille doit dm-
nager dans cette nouvelle ville, dans une nouvelle maison. Bien que la nouvelle
maison soit peut-tre plus grande que leur prcdente, possde plus de chambres
et ait une cuisine plus grande, le mouvement prservera les relations que vous
avez tablies entre les membres de la famille. Discutez de lanalogie entre cette
description et celle dune application linaire donne ci-dessus.
Note : Vous aurez besoin de votre exemplaire de Linear Algebra par Jim Hefferon
pour toute lactivit 3.
3.3 Ressources logicielles et Internet
Logiciel
Vous pouvez vous exercer avec toutes les oprations de matrice en utilisant
wxMaxima.
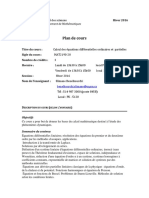
Lancez le logiciel. Lcran devrait ressembler celui-ci :
Tapez vos
commande
ici
Soyez attentif :
Ne pas ajouter dinter espaces
ou ponctuation.
Soyez sr de choisir les bonnes
parenthses.
Quand vous ouvrez une
parenthse, la parenthse qui
ferme entre automatiquement.
Dbuter avec les matrices
Tapez : A:Ma-
trix([3,0,0],[0,3,0],[0,0,3])
Appuyez sur la touche EN-
TRE de votre clavier
Tapez : B:Ma-
trix([1,2,3],[4,5,6],[7,8,9])
Vous devriez voir ceci :
(Si vous tes coinc et que vous vou-
lez recommencer, choisissez Restart
maxima dans le menu maxima).
ur|ve(s|l \|(lue||e Al(|ca|re 1Z
Maintenant que vous avez entr
deux matrices, vous pouvez tester
quelques oprations :
Tapez : A+B et appuyez sur
ENTRE
Tapez : 3*A et appuyez sur
ENTRE
Tapez : A.B (pour calculer
le produit scalaire et ap-
puyez sur ENTRE
Tapez : determinant(A) et
appuyez sur ENTRE
Tapez : invert(A) et appuyez
sur ENTRE
Tapez : eigenvectors(A) et
appuyez sur ENTRE
Tapez : eigenvalues(A) et
appuyez sur ENTRE
Vous devriez vous exercer avec mxMaxima.
Quand vous tes prt passer plus complexe, lancez l'aide de maxima dans le
menu help et choisissez lobjet 26 : Matrices and Linear Algebra (Matrices et Al-
gbre Linaire). Recherchez les oprations sur matrices dont vous avez besoins et
suivez les instructions pour vrifer que vous comprenez comment les utiliser.
Rfrences Internet
Wolfram MathWorld (site visit le 07.11.06)
http://mathworld.wolfram.com/LinearTransformation.html
Lisez cette entre sur les Transformations Linaires.
Suivez les liens claircissant les concepts spcifques, au besoin.
Wikipedia (site visit le 07.11.06)
http://en.wikipedia.org/wiki/Linear_transformations
Lisez cette entre sur les Transformations Linaires.
Suivez les liens claircissant les concepts spcifques, au besoin.
ur|ve(s|l \|(lue||e Al(|ca|re 18
3.4 Isomorphismes et Homomorphismes
3.4.1 Isomorphismes
Lectures et exemples p153-160
Dfnition 1.3 p155 isomorphisme
Dfnition p157 automorphisme
Note Importante :
Nous avons un autre nom pour une application, morphisme, et la dfnition d'iso-
morphisme sur la mme page.
Lemme 1.8, 1.9 p159
FAITES CECI :
Exercices 1.10, 1.11, 1.13, 1.17,1.19, 1.25, 1.28, 1.34
(RPONSES : P77-85)
3.4.2 Dimension and isomorphisme
Lectures et exemples p163-168.
Thorme 2.1 p163
Note Importante :
Il est important de se rappeler de la dfnition d'une relation d'quivalence. Cette
relation doit tre:
- Symtrique
- Rfexive
- Transitive.
Thorme 2.2 p164 Espaces vectoriels isomorphes
Lemme 2.3, 2.4 p164
Corollaire 2.6 p166
FAITES CECI :
Exercice p168-169: 2.8, 2.9, 2.11, 2.15, 2.17, 2.25.
(RPONSES : P85-87)
ur|ve(s|l \|(lue||e Al(|ca|re 19
3.4.3 Homomorphismes
Lectures et exemples p170- 175
Notes Importantes :
1. La dfnition est aussi la dfnition d'une application linaire ou une trans-
formation linaire (dans d'autres sources que vous rencontrerez, comme
expliqu ci-dessous dans la remarque 1.12). Notez aussi exemple 1.4, qui
traite de la notion d'un homomorphisme zro.
2. L'exemple 1.5 requiert une attention spciale car il explique le concept
d'homomorphisme en tant qu'application linaire et aussi la mthode de
rfutation par un contre-exemple.
Dfnition II.1 p170 homomorphisme
Lemme 1.6 p172
Lemme 1.7 p172
Notes Importantes :
Le lemme 1.7 p172 (1) est une condition suffsante pour la dfnition II.1. Car,
si l'on prend
c
1
= c
2
= 1
en (1) nous avons la premire condition d'un homo-
morphisme, et si nous prenons
c
2
= 0
en (1), nous avons la seconde condition
pour la dfnition II.1. Vous allez voir que le Lemme 1.7 est souvent utilis pour
prouver qu'une application est une transformation linaire puisqu'il est plus court
que la dfnition
FAITES CECI :
Discutez de l'utilisation de (2) du Lemme avec un ami.
Quels ajustements devez-vous faire (2) pour pouvoir le transformer en
thorme II.1 ?
Homomorphismes (Suite)
Thorme 1.9 p172
Thorme 1.9 menant une trs importante dfnition de transformation
linaire, particulire cette source-ci.
Dfnition 1.11 p173 transformation linaire
Remarque 1.12 p174 expliquant la dclaration pralable et la rupture par
rapport d'autres sources.
Lemme 1.16 p174
FAITES CECI :
Exercice 1.17, 1.18, 1.19
Discutez des exemples 1.20, 1.23, 1.26, 1.35, 1.38, avec un collgue et
trouvez les solutions.
RPONSES : P87-92
ur|ve(s|l \|(lue||e Al(|ca|re 50
3.5 Applications linaires
3.5.1 Espace image et Espace vectoriel nul
Note importante :
L'espace image est appel l'ensemble image ou juste l'image dans d'autres sources,
tandis que l'espace vectoriel nul est appel le noyau.
Lectures et exemples: p177-186.
Lemme 2.1 p178
Note importante :
La dimension de l'espace image est le rang de l'application.
Dfnition 2.2 p178. Espace image.
Lemme 2.10 p182.
Note importante :
Vous aurez besoin de vous rappeler des concepts de fonction inverse et image
inverse pour cette section.
Dfnition 2.11 p182 Espace vectoriel nul ou noyau.
Note importante :
L'espace vectoriel nul ou noyau de l'application linaire h:V
W est parfois
dnote par noyau(h) et est l'ensemble des lments de V qui ont pour image
0 W
.
Thorme 2.14 p183
Corollaire 2.17 p184
Lemme 2.18
Dfnition 2.19 p184 Application linaire inversible
Note importante :
Remarquez comment l'auteur a fait le lien entre applications linaires et matrices
en introduisant l'ide d'une application inversible.
Thorme 2.21 p185
FAITES CECI :
Exercice 2.22, 2.23, 2.24, 2.27
Discutez avec un collgue de 2.35, 2.38, 2.40, 2.42. p186-188.
(RPONSES : P93-97)
ur|ve(s|l \|(lue||e Al(|ca|re 51
3.5.2 Calcul des applications linaires
Lectures et exemples p189-203
3.5.3 Reprsenter des applications linaires avec des matrices
Dfnition 1.2 p191 reprsentation matricielle
Thorme 1.4 p192
Note importante :
Ce thorme dfnit essentiellement le procd de multiplication de matrices avec
lequel vous tes dj familier.
Dfnition 1.5 p 192 Produit multiplicatif matriciel
Note importante :
Les exemples de 1.8 nous ramnent la gomtrie de transformation. Vous devrez
revoir ce sujet chaque fois que vous aurez affaire des applications linaires et
des transformations, ainsi qu' des produits scalaires.
FAITES CECI :
Exercice: 1.11, 1.12, 1.13, 1.15, 1.17, 1.26. p196-199
Travaillez sur l'exercice 1.28 avec un collgue.
(RPONSES : P97-105)
3.5.4 Toute matrice reprsente une application linaire
Rappelez-vous : dans une activit prcdente nous avons introduit le concept de
matrice et utilis les oprations de ligne pour rsoudre les quations linaires.
Dans cette activit nous examinons le concept de matrice en tant quapplication
linaire. Vous devez donc revoir lactivit prcdente et vous familiariser avec
les oprations de lignes que nous y avons effectues.
Lectures et exemples: p199-203
Thorme 2.1 p199.
Note importante :
Le commentaire au pied de la page 200 est trs important et vous devriez le
prendre en note.
Thorme 2.3 p201
Corollaire 2.5 and 2.6 p202
ur|ve(s|l \|(lue||e Al(|ca|re 52
FAITES CECI :
Exercices 2.9, 2.10, 2.11, 2.14, 2.18 p203-205 (Notez les dfnitions de
matrice diagonale dans cet exercice).
Faites 2.20, 2.21, 2.22, avec un collgue.
(RPONSES : P105-109)
3.6 Oprations de matrices
Voici une section qui ne devrait pas vous poser problme puisque vous avez
effectu des oprations sur des matrices depuis lcole secondaire ! Tout ce que
vous avez faire est de faire attention la notation et la transposer pour rpondre
vos expriences prcdentes, et vice-versa !
Amusez-vous bien !
3.6.1 Sommes (addition de matrices) et Produits scalaires (Multiplication
dune matrice par un scalaire)
Lectures et exemples p206-207
Dfnition 1.3 p207 somme et multiplication par un scalaire
Thorme 1.5 p207
FAITES CECI :
Exercice 1.7, 1.8, 1.9 (Qu'est-ce que cet exercice vous rappelle ?)
Faites 1.10,-1.16 avec un collgue
(RPONSES : P109-110)
3.6.2 Multiplication de matrices
Lectures et exemples: p209-214
Lemme 2.1 p209
Dfnition 2.3 p 210
Thorme 2.6 p210 Produit multiplicatif de matrice
Note importante :
L'exemple 2.5 devrait vous rappeler quelque chose, puisque c'est ce que vous
avez fait tout du long !
Thorme 2.12 p213 Associativit des multiplications de matrices, distri-
butivit de la multiplication sur laddition de matrice.
ur|ve(s|l \|(lue||e Al(|ca|re 53
Note importante :
L'exemple 2.9, 2.10, et la remarque 2.11 p212 soulve un concept trs important
de multiplication de matrice et de loi commutative.
Note importante :
La thorie des fonctions a t utilise pour prouver ce thorme. Remarquez que
dans d'autres textes, les preuves sont bases sur la thorie des matrices et les
oprations sur les matrices. Les diffrentes faons de les prouver sont galement
acceptables.
FAITES CECI :
Exercice 2.14 -2.17, 2.23, 2.24, p214-216
Faites 2.26, 2.30, 2.34, 2.36, avec un collgue
RPONSES : P111-115
3.6.3 Techniques de multiplications de matrices
Lectures et exemples p 216-2.23
Voici la section qui vous ramne ce dont vous avez l'habitude et vous devriez
facilement passer cette preuve.
Dfnition 3.2 p217 matrice unit
Lemme 3.7 p218
Dfnition 3.8 p219 La diagonale principale
Dfnition 3.9 p219 La matrice unit
Dfnition 3.12 p219 La matrice diagonale
Dfnition 3.14 p220 La matrice de permutation
Dfnition 3.18 p221 La matrice de rduction lmentaire
Lemme 3.19 p221
Cette section devrait vous rappeler des oprations de ligne dont nous avons discut
quand nous rsolvions les systmes d'quations linaires.
Corollaire 3.22
FAITES CECI :
Exercice 3.23, 3.24, 3.25, 3.26
(Note : Cet exercice introduit les concepts dincidence et de matrices symtri-
ques).
ur|ve(s|l \|(lue||e Al(|ca|re 51
Faites 3.38, 3.39, 3.40, 3.43 , 3.44, 3.46 avec un collgue et notez les concepts
de trace, de triangle suprieur et de matrice stochastique.
(RPONSES : P115-123)
3.6.4 Inverses
Lectures et exemples p225-230
Dfnition 4.2 p226 Matrice inverse gauche et droite, matrice inversible,
matrice inverse
Lemme 4.3 p336
Thorme 4.4 p226
Lemme 4.5 p226
Lemme 4.8 p228
Corollaire 4.12 p229 dfnition d'une matrice 2x2
FAITES CECI :
Exercices 4.14 -4.21
Faites 4.48, 4.33, 4.34 avec un collgue.
3.6.5 Changement de base
Lectures et exemples p232 -234
3.6.6 Changement de reprsentation de vecteurs
Dfnition 1.1 p 232 Matrice de changement de base
Lemme 1.2 et 1.4 p233
Corollaire 1.5 p234
FAITES CECI :
Exercices 1.6 1.18 p233
RPONSES : P123-127
3.6.7 Changement de reprsentation linaire
Lectures et exemples p236 241
Dfnition 2.3 p238 quivalence matricielle
Corollaire 2.4 p 238
Thorme 2.6 p 239
Corollaire 2.8 p240
ur|ve(s|l \|(lue||e Al(|ca|re 55
FAITES CECI :
Exercice 2.10- 2.19
Faites 2.22 2.27 avec un collgue
RPONSES : P127-130
3.7 Projection
Lecture et exercices p244 -247
3.7.1 Projection orthogonale sur une ligne
Dfnition 1.1 p245 Projection orthogonale
FAITES CECI :
Exercice p247-248, 1.7- 1.10.
Faites l'exercice 1.18- 1.21 avec un collgue
(RPONSES : P130-133)
3.7.2 Orthogonalisation de Gram-Schmidt
Lectures et exemples p249- 254
Dfnition 2.1, p249 vecteurs mutuellement orthogonaux
Thorme 2.2 p249
Corollaire 2.3 p249
Dfnition 2.5 p250 base orthogonale
Thorme 2.7 Orthogonalisation de Gram-Schmidt
FAITES CECI :
Exercices p252 254, 2.9- 2.15
Faites l'exercice 2.18 - 2.23 avec un collgue.
(RPONSES :P133-139)
3.7.3 Projection sur un sous-espace
Lectures et exemples p254-260
Dfnition 3.1 p254
Dfnition 3.4 p257 Complment orthogonal, Projection orthogonale
Lemme 3.7 p258
Thorme 3.8 p259
ur|ve(s|l \|(lue||e Al(|ca|re 5
FAITES CECI :
Exercice 3.10-3.13. p260
Faites 3.18, 3.22, 3.23, 3.25 avec un collgue.
RPONSES : P140-146
3.8 Synthse
Lun des principes fondamentaux que vous avez appris dans cette activit est
quune discussion sur les transformations linaires est par essence une discussion
sur la thorie des matrices et que les oprations sur matrices et les transformations
linaires sont en fait synonymes.
Les concepts daddition et de multiplication de matrices ont t mis en avant en
tant que thormes de transformation linaire, et justifs, ce qui montre claire-
ment que la multiplication de matrice nest pas une chose mcanique, mais une
consquence logique des transformations linaires.
ur|ve(s|l \|(lue||e Al(|ca|re 5Z
Unit 2: Applications de matrices
Activits dapprentissage
Activit 1: Dterminants
1.0 Objectifs
la fn de cette activit, vous serez capable de :
Dfnir un dterminant
Dvelopper une formule pour dterminer si une matrice carre est inver-
sible ou non.
Calculer les dterminants de matrices carres donnes
Dcrire les proprits de dterminants.
Utiliser la rgle de Cramer pour rsoudre les systmes dquations linaires.
1.1 Glossaire
Utilisez Wikipedia pour une dfnition exhaustive de ces termes. Allez sur :
http://fr.wikipedia.org/wiki/Accueil et tapez le terme rechercher dans la bote de
recherche.
Inversible
Dterminant
Expansion par permutation
Application multilinaire
Permutation
Fonction signe
Paralllpipde
Expansion de Laplace
Transpose
Rgle de Cramer
1.2 Introduction
Durant votre scolarit vous avez utilis le dterminant pour calculer et rsoudre
des systmes dquations linaires en deux variables. Cette activit emmne ces
ides plus loin et explore le concept de dterminant non seulement en tant que
proprit dune matrice rgulire, mais aussi en tant que fonction qui transpose les
espaces des matrices carres dans les espaces des nombres rels. Tout ce que vous
aurez besoin de faire est de vous rappeler de ce que vous savez dj, et dessayer
darriver accorder la thorie de cet exercice ce que vous savez dj.
ur|ve(s|l \|(lue||e Al(|ca|re 58
Comme dans lUnit 1, vous aurez besoin de votre exemplaire de Linear
Algebra par Jim Hefferon pour cette unit.
1.3 Internet et Ressources logicielles
Logiciel
Vous devriez utiliser wxMaxima pour explorer les dterminants de matrices. Rf-
rez-vous la section commencer avec wxMaxima pour plus dinformation.
Rfrences Web
The Linear Algebra Toolkit (site visit le 07.11.06)
http://www.math.odu.edu/~bogacki/cgi-bin/lat.cgi?c=det
Explorez les dterminants avec cet outil.
Wolfram MathWorld (site visit le 07.11.06)
http://mathworld.wolfram.com/Determinant.html
Lisez cette entre sur les dterminants.
Suivez les liens pour obtenir plus d'informations sur des concepts spcif-
ques, selon vos besoins.
Wikipedia (site visit le 07.11.06)
http://en.wikipedia.org/wiki/Determinant
Lisez cette entre sur les dterminants.
Suivez les liens pour obtenir plus d'informations sur des concepts spcif-
ques, selon vos besoins.
MacTutor History of Mathematics (site visit le 07.11.06)
http://www-history.mcs.st-andrews.ac.uk/HistTopics/Matrices_and_determinants.html
Explorez l'histoire des matrices et des dterminants.
ur|ve(s|l \|(lue||e Al(|ca|re 59
1.4 Le dterminant
Dfnition 1 p288 Dterminant
Lecture p288-290
Note importante :
Exploration 1.1p288-290. Vous devez lire cette section trs attentivement car elle
vous propose un traitement intuitif des proprits de dterminants.
FAITES CECI :.
Exercice 1.1, 1.3, 1.5, 1.6, 1.7, 1.8, 1.9.
Faites 1.3- 1.18 avec un collgue
RPONSES : P163-165
1.4.1 Proprits des dterminants
Note importante :
Vous devez comparer ces proprits avec les proprits de matrices subissant des
oprations de lignes que vous avez tudies durant l'exercice sur les systmes
d'quations linaires, afn de vous rappeler de ce que vous savez sur les limina-
tions de Gauss-Jordan.
Lectures et exemples p293-295
Lemme 2.6 p295
FAITES CECI :
Exercice 2.7, 2.9, 2.10, 2.13. 295- 297
Faites 2.16-2.22 avec un collgue
RPONSES : P165-168
1.4.2 Lexpansion par permutation
Lectures et exemples p297- 298
Dfnition 3.2 p298 Application multilinaire
Lemme 3.3 p299
Dfnition 3.7 p301 Permutation
Dfnition 3.9 p302 Expansion par permutation
Thormes 3.11 et 3.12 p303
Corollaire 3.13 p303
ur|ve(s|l \|(lue||e Al(|ca|re 0
FAITES CECI :
Exercice 3.16, 3.18, 3.20, 3.30, 3.33, 3.34
RPONSES : P168-170
1.4.3 Les dterminants existent
Lecture p306-311
Dfnition 4.1 p307 Inversion
Lemme 4.3 p307
Dfnition 4.4 p308 Fonction signe
Lemme 4.7 p309
Thorme 4.9 p311
trans
T T =
FAITES CECI :
Exercices 4.10 -4.17 p311-312 faire avec un collgue
RPONSES : P171-172
1.5 Gomtrie des dterminants
1.5.1 Dterminants comme fonction taille
Lectures et exemples p313- 317
Dfnition 1.3 p315 Paralllpipde
Thorme 1.5 p315
Corollaire 1.7
T
1
= 1/ T
FAITES CECI :
Exercices 1.8- 1.12
Faites 1.15, 1.19, 1.24, 1.26, avec un collgue
RPONSES : P172-175
ur|ve(s|l \|(lue||e Al(|ca|re 1
1.6 Autres formules
1.6.1 Expansion de Laplace
Lecture et exercices p320-323
Dfnition 1.2 p321. Notez l'introduction des concepts de mineur et co-
facteur.
Thorme 1.5 p231 Expansion de Laplace des dterminants
Dfnition 1.8 p322 Transpose
Thorme 1.9 p 322
Corollaire 1.11 p323
FAITES CECI :
Exercices 1.13- 1.18
Faites 1.23-1.28 avec un collgue.
RPONSES : P176-179
1.6.2 Rgle de Cramer
Lectures et exemples p325-326
FAITES CECI :
Discutez des exercices avec un collgue. p326-327
RPONSES : P178-179
1.7 Synthse
Cette activit a tendu vos connaissances dans le domaine des matrices, et vous
a prsent la thorie des dterminants, un concept-cl dans la thorie des matri-
ces. Elle vous a aussi permis de vous familiariser avec une application important
des dterminants, que vous avez utiliss pour rsoudre les systmes dquations
linaires.
ur|ve(s|l \|(lue||e Al(|ca|re 2
Activit 2: Similarit
2.0 Objectifs
la fn de cette activit, vous devriez tre capable de :
Dfnir ce que signife un espace vectoriel complexe.
Dfnir et expliquer ce que signife le terme matrice semblable
Dfnir une transformation diagonalisable.
Expliquer la relation entre une matrice diagonalisable et une matrice
diagonale.
Donner et prouver les conditions qui caractrisent une matrice diagonali-
sable.
Trouver le polynme caractristique dune matrice nxn ou dune trans-
formation linaire.
Trouver par calcul une base de l'espace propre correspondant la valeur
propre dune matrice.
Prouver des proprits importantes des valeurs propres et des vecteurs
propres.
Donner et prouver le thorme de Cayley-Hamilton.
2.1 Glossaire
Utilisez Wikipedia pour une dfnition exhaustive de ces termes. Allez sur :
http://fr.wikipedia.org/wiki/Accueil et tapez le terme rechercher dans la bote de
recherche.
Espaces vectoriels complexes
Thorme de la division des polynmes
Matrices semblables
Diagonalisabilit
Matrice diagonalisable
Valeur propre
Vecteur propre
Polynme caractristique
quation caractristique
Espace propre
Nilpotent
Espace image gnralis
Limite des noyaux itrs
Chanes
ur|ve(s|l \|(lue||e Al(|ca|re 3
Base de t-chanes
Rduction de Jordan
Polynme minimal d'un endomorphisme
Thorme de Cayley-Hamilton
Forme normale de Jordan
2.2 Introduction
Dans cette activit nous nous consacrons ces applications qui transforment un
espace vectoriel en un scalaire multiple de lui-mme. Ceci est une consquence
de nombreux problmes en mathmatiques o il est important de dterminant
ces scalaires
pour lesquels lquation
t
r
=
r
na pas zro solution dans
une application linaire donne t: V
V. Les scalaires pour lesquels lquation
fonctionne sont appeles valeurs propres et les vecteurs correspondants
r
sont
appels vecteurs propres. Dans cette activit nous allons exprimenter avec cette
quation et discuter de certaines de ses applications.
Note : Vous aurez besoin de voter exemplaire de Linear Algebra par Jim Hefferon
pour toute lactivit 2.
2.3 Internet et ressources logicielles
Logiciel
Vous devriez utiliser wxMaxima pour explorer plus avant les proprits des ma-
trices. Rfrez-vous la section commencer avec wxMaxima dans lActivit
3 de lUnit 1 de ce module pour plus dinformation.
Notamment, vous voudrez peut-tre utiliser ces fonctions :
Diagmatrix (matrices diagonales)
Exemple : type A : diagmatrix(3,4) pour produire une matrice
A =
4 0 0
0 4 0
0 0 4
Eigenvalues (valeurs propres)
Exemple : eigenvalues(A) montre les valeurs propres de la matrice A
Eigenvectors (vecteurs propres)
Exemple : eigenvectors(A) montre les vecteurs propres de la matrice A
ur|ve(s|l \|(lue||e Al(|ca|re 1
Rfrences Web
Wikipedia (site visit le 07.11.06)
http://en.wikipedia.org/wiki/Diagonalizable_matrix
Lisez cette entre sur les matrices diagonalisables
Suivez les liens pour obtenir plus d'informations sur des concepts spcif-
ques, selon vos besoins.
2.4 Espaces vectoriels complexes
2.4.1 Thorie des nombres
Note importante :
Pour des informations de base sur cette section et certaines des preuves des
thormes vous aurez besoin de revoir votre travail sur le module de Thorie
des nombres.
Lectures et exemples p343- 346
Thorme 1.1 Thorme de la division des polynmes p 344
Corollaire 1.3, 1.4 p344
Thorme 1.5 p345 Irrductibilit
Corollaire 1.6, 1.10 p345 (Thorme fondamental dalgbre)
2.4.2 Similarit
Lectures et exemples p347- 348
Dfnition 1.1 Matrices semblables
FAITES CECI :
Exercice 1.4, 1.5, 1.6, 1.7, p349
Faites 1.12, 1.17, 1.19, 1.21 avec un collgue
(RPONSES : P183-186)
2.4.3 Diagonalisable
Lectures et exemples p349-352
Dfnition 2.1 p350 Transformation diagonalisable, matrice diagonali-
sable
Corollaire 2.4., p350
ur|ve(s|l \|(lue||e Al(|ca|re 5
FAITES CECI :
Exercice p352-353: 2.6-2.12, 2.14- 2.18
(RPONSES : P186-190)
2.4.4 Valeurs propres et vecteurs propres
Lectures et exemples p353-358
Dfnition 3.1 p353 Valeur propre et vecteur propre
Note importante :
Vous devez vous familiariser avec la remarque 3.5 et son contenu.
Dfnition 3.5 p354 valeur propre et vecteur propre d'une matrice carre
Dfnition 3.9 p356 Polynme caractristique, quation caractristi-
que;
Dfnition 3.11 p 356 Espace propre
Lemme 3.12 p356
Thorme 3.17 p357
Lemme 3.19 p358
FAITES CECI :
Exercices p358-360: 3.20-3.24, 3.28, 3.36, 3.40
(RPONSES : P190-195)
2.4.5 Nilpotent
Lectures et exemples p361-374
Puissance p361-363
Lemme 1.3 p362 Chane descendante
Dfnition 1.7 p363 Espace image gnralis et Limite des noyaux it-
rs
FAITES CECI :
Exercices p364 1.8-1.11.
Faites 1.12, 1.13, 1.15 avec un collgue
(RPONSES : P195-196)
ur|ve(s|l \|(lue||e Al(|ca|re
2.4.6 Chanes
Lectures et exemples p364-372
Lemme 2.1 p364
Dfnition 2.6 p366 Matrice nilpotente, Transformation nilpotente,
Index de nilpotence
Dfnition 2.10 p367 t-chanes, base de t-chanes
Thorme 2.13 p369
Corollaire 2.14 p370
FAITES CECI :
Exercices p372-374: 2.17-2.20
Faites 2.28, 2.35 avec un collgue
RPONSES : P196-201
2.4.7 Rduction de Jordan
Lectures et exemples p375-392 Polynmes dapplications et de matri-
ces
Lectures et exemples p375-380
Dfnition 1.3, 1.5 p376 Polynme minimal
Lemme1.7 p377
Thorme 1.8 p378 Thorme de Cayley-Hamilton
Note importante :
Le lemme 1.9, 1.10, 1.11 p378-379 prouve le thorme de Cayley-Hamilton.
D'autres sources ont crit le thorme de la manire suivante :
laissez A tre n'importe quelle matrice nxn avec le polynme caractristique
P
n
() = (1)
n
n
+ a
n1
n1
+ ... + a
1
+ a
0
then
P
n
( A) (1)
n
A
n
+ a
n1
A
n1
+ ... + a
1
A+ a
0
I = 0
FAITES CECI :
Exercices p380-382 1.13-1.17, 1.22, 1.29, 1.32, 1.31
(RPONSES : P201-207)
ur|ve(s|l \|(lue||e Al(|ca|re Z
2.4.8 Forme normale de Jordan
Lectures et exemples p382- 392
Lemme 2.2 p382
Dfnition 2.6 p385 invariant-t
Lemme 2.7 p 385
Lemme 2.8, 2.9, p386
Lemme 2.11p387
Thorme 2.12 pg 388
FAITES CECI :
Exercices 2.18-2.21, 2.24, 2.28, 2.34 P392-394
(RPONSES : P207-214)
2.5 Synthse
Dans cette unit vous avez appris trouver le polynme caractristique dune
matrice carre ou application linaire et comment lutiliser pour trouver les valeurs
propres et vecteurs propres caractristiques. Vous avez aussi appris calculer la
base pour un espace vectoriel propre correspondant la valeur propre donne
dune matrice. Finalement vous avez appris les conditions qui caractrisent une
matrice diagonalisable et le calcul dune matrice diagonale similaire une matrice
diagonalisable.
ur|ve(s|l \|(lue||e Al(|ca|re 8
XV. synthse du module
Dans lUnit 1 nous avons introduit les concepts de base des quations linaires
et des systmes dquations linaires, et poursuivi en discutant des diffrentes
manires de les rsoudre. Nous vous avons aussi montr plusieurs manires de
problmatiser des situations comment considrer des situations de la vie pour
les transformer en modles mathmatiques. Ceci est un aspect trs important de
la pense pour lenseignement et lapprentissage des mathmatiques.
Nous avons poursuivi par lexamen des concepts de matrices et de vecteurs,
menant au thme essentiel de lalgbre linaire : les espaces vectoriels, leurs
proprits et autres concepts lis, tels les sous-espaces, les bases et les dimen-
sions. Dans cette Unit, vous aurez aussi remarqu que nous avons essay de
lier ces problmes des situations de la vie. Vous aurez cependant not que cela
fut plus rare dans lUnit 2, car le contenu et les concepts voqus taient plus
thoriques et abstraits.
Les concepts despaces vectoriels et dapplications linaires ont t tendus aux
concepts de valeurs propres et de vecteurs propres, et aux applications lies.
Finalement, nous avons essay de vous montrer que le savoir mathmatique est
organis et centralis autour de dfnitions, lemmes, propositions, thormes,
exemples, contre-exemples, exercices etc. Nous esprons que vous avez pu tes-
ter votre comprhension de ceux-ci en suivant attentivement et diligemment les
nombreux exemples donns dans les lectures obligatoires et en faisant plus que
les exercices conseills dans ce module.
Une vraie comprhension des mathmatiques vient en rsolvant de nombreux
exercices, seul et collectivement avec vos collgues et dautres personnes verses
dans les mathmatiques. Nous esprons que vous avez pris lhabitude de faire le
plus dexercices possible !
ur|ve(s|l \|(lue||e Al(|ca|re 9
XVi. valuation sommative
valuations et solutions
Questions de lvaluation sommative
Temps allou : 4 heures.
Rpondez toutes les questions.
1 Rsolvez le systme dquation suivant en utilisant la rduction de Gauss-Jordan.
x
1
+ 3x
2
2x
3
+ 2x
5
= 0
2x
1
+ 6x
2
5x
3
2x
4
+ 4x
5
3x
6
= 1
5x
3
+10x
4
+15x
6
= 5
2x
1
+ 6x
2
+ 8x
4
+ 4x
5
+18x
6
= 6
2 (a) Dfnissez un espace vectoriel U en indiquant tous les axiomes
(b) Prouvez que lensemble
L =
x
y
z
w
4
x + y z + w= 0
est un espace vectoriel au titre des oprations hrites de
4
.
(c) Prouvez que lensemble
L =
x
y
z
3
x + y + z = 1
nest pas un espace vectoriel au titre des oprations hrites de
3
.
ur|ve(s|l \|(lue||e Al(|ca|re Z0
3(a) Dfnissez un sous-espace
W V
.
(b) A tant une matrice fxe
m n
avec des entres relles. Avec .
N = x x
n
and Ax = 0
{ }
Prouvez que N est un sous-espace de
n
.
4 Faites en sorte que
Q =
0 1 1
1 0 1
1 1 0
en utilisant les oprations de ligne montrez que linverse,
Q
1
, est donn par
Q
1
=
1
2
1 1 1
1 1 1
1 1 1
5(a) Dfnissez les deux proprits de la transformation linaire
T :U V
.
(b) Faites en sorte que mn
M
dsigne lespace de matrices
m n
avec des entres
relles et nm
M
lespace de matrices
n m
avec des entres relles. Considrez
que
T : M
mn
M
nm
est dfni par
( )
T
T A A =
, o a est une matrice
m n
.
Prouvez que T est une transformation linaire/
6 Avec U et V en tant que espaces vectoriels, et
T :U V
une transformation
linaire. Prouvez les affrmations suivantes :
(i)
(0) 0 T =
(ii)
T (x + y) = T (x) + T ( y)
(iii)
T
i
x
i
i =1
n
=
i
T (x
i
)
i =1
n
ur|ve(s|l \|(lue||e Al(|ca|re Z1
7 Vrifez que lapplication suivante est une base pour
3
1
2
3
,
3
2
1
,
0
0
1
8 Trouvez une base orthonormale pour le sous-espace de
3
engendr par x
1
, x
2
, x
3
si
x
1
=
1
1
1
, x
2
=
0
1
1
, x
3
=
0
0
1
Astuce : Utilisez le procd de Gram-Schmidt.
9 Avec
A =
3 2 0
2 3 0
0 0 5
Trouvez les valeurs propres et les vecteurs propres correspondant de la matrice
A.
FIN DE LEXAMEN
ur|ve(s|l \|(lue||e Al(|ca|re Z2
Solutions de lvaluation sommative
1 La matrice augmente du systme est :
1 3 2 0 2 0
2 6 5 2 4 3
0 0 5 10 0 15
2 6 0 8 4 18
0
1
5
6
r
2
2r
1
+ r
2
, r
4
2r
1
+ r
4
1 3 2 0 2 0
0 0 1 2 0 3
0 0 5 10 0 15
0 0 4 8 0 18
0
1
5
6
r
2
r
2
, r
3
r
3
r
2
, r
4
r
4
4r
2
1 3 2 0 2 0
0 0 1 2 0 3
0 0 0 0 0 0
0 0 0 0 0 6
0
1
0
2
r
3
r
4
, r
3
1
6
r
3
1 3 2 0 2 0
0 0 1 2 0 3
0 0 0 0 0 1
0 0 0 0 0 0
0
1
1
3
0
r
2
r
2
3r
3
1 3 0 4 2 0
0 0 1 2 0 0
0 0 0 0 0 1
0 0 0 0 0 0
0
0
1
3
0
ur|ve(s|l \|(lue||e Al(|ca|re Z3
Donc
1
6 3
x =
,
x
3
= 2x
4
1 2 4 5
3 4 2 0 x x x x + + + =
Avec 4
x s =
,
x
3
= 2s
, 5
x t =
, 2
x r =
,
x
1
= 3r 4s 2t
.
Nous avons donc une infnit de solutions.
2 Un espace vectoriel (sur
) se compose dun ensemble U avec deux opra-
tions + et
sujet des axiomes suivants :
(A1) tant donn que
v, wU
v + wU
(A2)
v w w v + = +
(A3)
( ) ( ) v w u v w u + + = + +
ou
v, w, u U
(A4)
0 U : v + 0 = v
,
v U
(A5)
v U wU
de sorte que
0 v w + =
(oppos)
(A6) Pour chaque scalaire
s
sv U
,
v U
(A7) Pour les scalaires
s,t
( ) s t v s v t v + = +
(A8)
t (v + w) = t v + t w, t
(A9)
(ts) v = t (s v), s,t
(A10)
1 v v =
(b) Notez que
x
1
y
1
z
1
w
1
+
x
2
y
2
z
2
w
2
=
x
1
+ x
2
y
1
+ y
2
z
1
+ z
2
w
1
+ w
2
est en L car
= (x
1
+ y
1
z
1
+ w
1
) + (x
2
+ y
2
z
2
+ w
2
)
=0+0
=0
Donc Lest un espace vectoriel.
ur|ve(s|l \|(lue||e Al(|ca|re Z1
(c) Notez que
x
1
y
1
z
1
+
x
2
y
2
z
2
=
x
1
+ x
2
y
1
+ y
2
z
1
+ z
2
Par consquent
1 2 1 2 1 2
( ) ( ) ( ) x x y y z z + + + + +
= 1 1 1 2 2 2
( ) ( ) x y z x y z + + + + +
=1+1
=2
Donc lensemble nest pas un espace vectoriel.
3(a) Pour tout espace vectoriel V, un sous-espace W est un sous-ensemble qui est
en soi un espace vectoriel, au titre des oprations hrites.
(b) Premirement, supposons que
x
1
N
et
x
2
N
, ensuite
1 2 1 2
( ) A x x Ax Ax + = +
=0+0
=0
Par consquent
x
1
+ x
2
N
. Ensuite, si
x N
et
est un scalaire
A(x) = A(x)
=
0
=0
Donc
x N
.
Par consquent nous pouvons voir que N est un sous-espace de
4
.
ur|ve(s|l \|(lue||e Al(|ca|re Z5
4 La matrice augmente est :
0 1 1
1 0 1
1 1 0
1 0 0
0 1 0
0 0 1
r
1
r
3
1 1 0
1 0 1
0 1 1
0 0 1
0 1 0
1 0 0
r
2
r
2
r
1
1 1 0
0 1 1
0 1 1
0 0 1
0 1 1
1 0 0
r
3
r
3
+ r
2
1 1 0
0 1 1
0 0 2
0 0 1
0 1 1
1 1 1
r
3
1
2
r
3
1 1 0
0 1 1
0 0 1
0 0 1
0 1 1
1
2
1
2
1
2
r
2
r
2
r
3
1 1 0
0 1 0
0 0 1
0 0 1
1
2
1
2
1
2
1
2
1
2
1
2
r
1
r
1
+ r
2
; r
2
r
2
1 0 0
0 1 0
0 0 1
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
ur|ve(s|l \|(lue||e Al(|ca|re Z
Par consquent
Q
1
=
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
1
2
5(a) Faites en sorte que V et W soient des espaces vectoriels et que T soit une
fonction
T :V W
. Pour que T soit linaire :
(i) ( ) ( ) ( ) , T x y T x T y x y V + = +
(ii)
T (x) +T (x) x V and
(b) Puisque la matrice transpose
m n
est une matrice
n m
, T est une fonc-
tion bien dfnie de mn
M
nm
M
. Si A et B sont des matrices
m n
et
est
un scalaire.
( ) ( )
T
T A B A B by definition of T + = +
T T
A B by distribution law = +
( ) ( ) T A T B by definition of T = +
et
T (A) = (A)
T
by definition of T
T
A =
= T ( A) by definition of T
6 (i)
(0) (0 ) 0 ( ) 0 T T x T x = = =
(ii)
T (x + y) = T (x) + T (y)
( ) ( ) T x T y = +
(iii) Preuve par induction mathmatique
Si n=1 alors
T (
1
x
1
) =
1
T (x
1
)
est vrai
ur|ve(s|l \|(lue||e Al(|ca|re ZZ
Si
1 n >
T
i
x
i
i =1
n
= T
i
x
i
i =1
n1
+
n
x
n
= T
i
x
i
i =1
n1
+T
n
x
n
( )
Par hypothse dinduction
T
i
x
i
i =1
n1
=
i
T (x
i
)
i =1
n1
Ainsi, nous avons ( )
1
1
( )
n
i i n n
i
T x T x
=
+
( )
1
1
( )
n
i i n n
i
T x T x
=
= +
7 Considrez que
x
1
=
1
2
3
; x
2
=
3
2
1
; x
3
=
0
0
1
Pour montrer que cet ensemble de vecteurs traverse
3
, nous devons montrer
quexistent les scalaires
1
,
2
,
3
tels que
x =
1
x
1
+
2
x
2
+
3
x
3
.
1
2
3
1 3 0
2 2 0
3 1 1
x
y
z
=
Maintenant
1 3 0
1 3
2 2 0 2 6 4
2 2
3 1 1
= = =
ur|ve(s|l \|(lue||e Al(|ca|re Z8
Nous voyons que ce systme dquations est rsoluble.
Donc le systme dquation traverse
3
.
Pour prouver lindpendance linaire, nous avons
1 1 2 2 3 3
0 x x x + + =
1
2
3
1 3 0 0
2 2 0 0
3 1 1 0
x
x
x
=
En rsolvant cette matrice, nous avons la matrice augmente suivante :
1 3 0
2 2 0
3 1 1
0
0
0
r
1
2r
1
2 6 0 0
2 2 0 0 ; ; 3
3 1 1 0
r r r r r r r r
+
0 4 0 0
1 1 0 0 ;
0 0 2 0
r r r r
0 1 0
1 1 0
0 0 1
0
0
0
r
2
r
2
r
1
0 1 0
1 0 0
0 0 1
0
0
0
ur|ve(s|l \|(lue||e Al(|ca|re Z9
Par consquent 1 2 3
0, 0, 0 x x x = = =
Do indpendance linaire et donc lensemble de vecteurs est une base pour
3
.
8 Considrez que
x
1
=
1
1
1
; x
2
=
0
1
1
; x
3
=
0
0
1
Utilisant le procd de Gram-Schmidt
v
1
=
x
1
x
1
=
(1,1,1)
3
=
1
3
,
1
3
,
1
3
x
2
x
2
, v
1
v
1
= (0,1,1)
2
3
1
3
,
1
3
,
1
3
=
2
3
,
1
3
,
1
3
v
2
=
x
2
x
2
, v
1
v
1
x
2
x
2
, v
1
v
1
=
3
6
2
3
,
1
3
,
1
3
=
2
6
,
1
6
,
1
6
x
3
x
3
, v
1
v
1
x
3
, v
2
v
2
= (0,0,1)
1
3
1
3
,
1
3
,
1
3
1
6
2
6
,
1
6
,
1
6
= 0,
1
2
,
1
2
( )
v
3
=
x
3
x
3
, v
1
v
1
x
3
, v
2
v
2
x
3
x
3
, v
1
v
1
x
3
, v
2
v
2
=
0,
1
2
,
1
2
( )
0,
1
2
,
1
2
( )
= 2 0,
1
2
,
1
2
( )
ur|ve(s|l \|(lue||e Al(|ca|re 80
Par consquent
v
1
=
1
3
,
1
3
,
1
3
; v
2
=
2
6
,
1
6
,
1
6
; v
3
= (0,
1
2
,
1
2
)
forme une base
orthonormale pour
3
.
9 Lquation caractristique pour A est
I A
( )
= 0
0 0
0 0
0 0
3 2 0
2 3 0
0 0 5
= 0
3 2 0
2 3 0
0 0 5
= 0
= ( 3)
3 0
0 5
2
2 0
0 5
= ( 3)( 3)( 5) 4( 5)
= ( 5)
2
6 + 9 4
2
( 5) 6 5 = +
2
( 5) ( 1) 0 = =
Par consquent
5 =
deux fois ou
1 =
Quand
5 =
3 2 0
2 3 0
0 0 5
x
1
x
2
x
3
= 0
ur|ve(s|l \|(lue||e Al(|ca|re 81
2 2 0
2 2 0
0 0 0
0
0
0
r
2
r
2
r
1
2 2 0
0 0 0
0 0 0
0
0
0
Let x
2
= s, x
1
= s, x
3
= t
alors
x =
s
s
t
= s
1
1
0
+ t
0
0
1
les vecteurs propres sont
1
1
0
et
0
0
1
.
Maintenant quand
1 =
2 2 0
2 2 0
0 0 4
0
0
0
r
2
r
2
+ r
1
; r
3
1
4
r
3
2 2 0
0 0 0
0 0 1
0
0
0
De telle manire que 1 2 3
, , 0 x s x s x = = =
. Le vecteur propre correspondant
1 =
est
x =
1
1
0
.
ur|ve(s|l \|(lue||e Al(|ca|re 82
XVii. rfrences
Jim Hefferon, Linear Algebra, Saint Michaels College, Colchester, Vermont USA
05439, 2006. Rfrence Web : http://joshua.smcvt.edu
1
ALGBRE LINAIRE
Lectures Obligatoires
Source: Wikipedia.org
2
Table des matires
Algbre linaire ............................................................................................................................................. 4
Intrt ...................................................................................................................................................... 4
Prsentation lmentaire ........................................................................................................................ 5
Quelques thormes ................................................................................................................................ 5
Utilisations ............................................................................................................................................... 6
Groupe fini ........................................................................................................................................... 6
Anneau ................................................................................................................................................. 7
Thorie de Galois ................................................................................................................................. 8
Proprits mtriques des droites et plans .................................................................................................... 9
La droite dans le plan euclidien ............................................................................................................... 9
Vecteur normal une droite ................................................................................................................ 9
Droite passant par un point et orthogonale un vecteur non nul donn ......................................... 10
Distance algbrique d'un point M(x,y) une droite d'quation ux + vy + h = 0 ................................ 10
Droite et pente ................................................................................................................................... 10
quation normale d'une droite .......................................................................................................... 11
Angles de deux droites ....................................................................................................................... 11
La droite dans l'espace euclidien ........................................................................................................... 11
Distance d'un point M une droite quelconque D de l'espace ......................................................... 11
Droites orthogonales un plan .......................................................................................................... 12
Distance entre deux droites quelconque de l'espace ........................................................................ 13
Le plan dans l'espace euclidien .............................................................................................................. 13
Vecteur orthogonal un plan ............................................................................................................ 13
Plan passant par un point et orthogonal un vecteur non nul donn .............................................. 14
Distance algbrique d'un point M(x,y,z) un plan P d'quation ux + vy + wz + h = 0 ....................... 14
Angles de deux plans .......................................................................................................................... 14
Plans perpendiculaires ....................................................................................................................... 15
quation de plan et dterminant ....................................................................................................... 15
Dterminant (mathmatiques) ................................................................................................................... 16
Histoire des dterminants ...................................................................................................................... 17
Premiers calculs de dterminants ...................................................................................................... 17
Dterminants de taille quelconque ................................................................................................... 18
3
Mise en place de la notion moderne de dterminant ....................................................................... 18
Premiers exemples : aires et volumes ................................................................................................... 19
Dterminant de deux vecteurs dans le plan euclidien ....................................................................... 19
Dterminant de trois vecteurs dans l'espace euclidien ..................................................................... 21
Interprtation du signe du dterminant : orientation ....................................................................... 22
Approche intuitive du dterminant d'une application linaire ......................................................... 22
Cadre d'utilisation .................................................................................................................................. 24
Dterminant et quations linaires ................................................................................................... 24
Dterminant et rduction .................................................................................................................. 25
Dterminant et intgrale multiple ..................................................................................................... 25
Dterminant et amortissement dans les quations diffrentielles ................................................... 25
Dfinition du dterminant ..................................................................................................................... 26
Origine de la construction du dterminant ....................................................................................... 26
Formes n-linaires alternes .............................................................................................................. 27
Dterminant d'une famille de n vecteurs dans une base .................................................................. 28
Dterminant d'une matrice ................................................................................................................ 29
Dterminant d'un endomorphisme ................................................................................................... 30
Proprits ............................................................................................................................................... 31
Caractre n-linaire altern ............................................................................................................... 31
Proprits de morphisme et d'annulation ......................................................................................... 32
Cofacteurs et formule de rcurrence ................................................................................................. 33
Variations de la fonction dterminant ............................................................................................... 35
Gnralisation aux espaces vectoriels sur d'autres corps et aux modules ............................................ 36
Wronskien ................................................................................................................................................... 37
Wronskien pour une quation scalaire d'ordre deux ............................................................................ 37
Dfinition gnrale pour une quation vectorielle ............................................................................... 38
Thorme de Liouville ........................................................................................................................ 39
quations scalaires d'ordre n ............................................................................................................. 39
4
Algbre linaire
Lalgbre linaire est la branche des mathmatiques qui s'intresse l'tude des espaces
vectoriels (ou espaces linaires), de leurs lments les vecteurs, des transformations linaires et
des systmes d'quations linaires (thorie des matrices).
Histoire []
L'histoire de l'algbre linaire commence avec Ren Descartes qui le premier pose des problmes
de gomtrie, comme l'intersection de deux droites, sous forme d'quation linaire. Il tablit alors
un pont entre deux branches mathmatiques jusqu' prsent spares : l'algbre et la gomtrie.
S'il ne dfinit pas la notion de base de l'algbre linaire qui est l'espace vectoriel, il l'utilise dj
avec succs. Aprs cette dcouverte, les progrs en algbre linaire vont se limiter des tudes
ponctuelles comme la dfinition et l'analyse des premires proprits des dterminants par Jean
d'Alembert.
Ce n'est qu'au XIX
e
sicle que l'algbre linaire devient une branche des mathmatiques part
entire. Carl Friedrich Gauss trouve une mthode gnrique pour la rsolution des systmes
d'quations linaires, Marie Ennemond Camille Jordan rsout dfinitivement le problme de la
rduction d'endomorphisme. En 1843, William Rowan Hamilton (inventeur du terme vector)
dcouvre les quaternions. En 1844, Hermann Grassmann publie un livre Die lineare
Ausdehnungslehre.
Le dbut du XX
e
sicle voit la naissance de la formalisation moderne des mathmatiques. Les
espaces vectoriels deviennent alors une structure gnrale omni-prsente dans presque tous les
domaines mathmatiques.
Intrt []
Sous leur forme la plus simple, les espaces vectoriels reprsentent intuitivement les
dplacements dans les espaces gomtriques lmentaires comme la droite, le plan ou notre
espace physique. Les bases de cette thorie remplacent maintenant la reprsentation construite
par Euclide au III
e
sicle av. J.-C.. La construction moderne permet de gnraliser la notion
d'espace des dimensions quelconques.
L'algbre linaire permet de rsoudre tout un ensemble d'quations dites linaires utilises non
seulement en mathmatiques ou en mcanique, mais dans de nombreuses autres branches comme
les sciences naturelles ou les sciences sociales.
Les espaces vectoriels forment aussi un outil fondamental pour les sciences de l'ingnieur et
servent de base de nombreux domaines dans la recherche oprationnelle.
5
Enfin, c'est un outil utilis en mathmatiques pour rsoudre des problmes aussi divers que la
thorie des groupes, des anneaux ou des corps, l'analyse fonctionnelle, la gomtrie diffrentielle
ou la thorie des nombres.
Prsentation lmentaire []
L'algbre linaire commence par l'tude de vecteurs dans les espaces cartsiens de dimension 2
et 3. Un vecteur, ici, est un segment de droite caractris la fois par sa longueur (ou norme), sa
direction et son sens. Les vecteurs peuvent alors tre utiliss pour reprsenter certaines entits
physiques comme des dplacements, additionns entre eux ou encore multiplis par des scalaires
(nombres), formant ainsi le premier exemple concret d'espace vectoriel.
L'algbre linaire moderne a t tendue pour considrer les espaces de dimension arbitraire ou
infinie. Un espace vectoriel de dimension n est appel un n-espace. La plupart des rsultats
obtenus dans les 2-espaces et 3-espaces peuvent tre tendus aux espaces de dimensions
suprieures. Bien que beaucoup de personnes ne peuvent apprhender correctement un vecteur
dans un n-espace, ils sont utiles pour reprsenter des donnes. Les vecteurs tant des listes
ordonnes n composantes, on peut manipuler ces donnes efficacement dans cet
environnement. Par exemple en conomie, on peut crer et utiliser des vecteurs huit dimensions
pour reprsenter le produit national brut de huit pays.
Quelques thormes []
Tout espace vectoriel de dimension finie possde au moins une base.
Toutes les bases du mme espace vectoriel de dimension finie ont un mme nombre de
vecteurs.
Thorme de la base incomplte : soit E un espace vectoriel de dimension finie, G
une famille gnratrice de E et L une famille libre de vecteurs de G. Alors il existe au
moins une base B de E telle que L soit incluse dans B et B incluse dans G.
Tout espace vectoriel A possde un espace dual A
*
; si A est de dimension finie, A
*
est de
mme dimension.
Formule de Grassmann : Soient E et G deux sous espaces vectoriels d'un mme espace
vectoriel de dimension finie. On a alors :
D'autres thormes concernent les conditions d'inversion de matrices de divers types :
matrice diagonale
bande
matrice triangulaire
diagonale dominante (trs utilises en analyse numrique)
Un thorme intressant l'poque des mmoires d'ordinateurs de petite taille tait qu'on pouvait
travailler sparment sur des sous-ensembles ( blocs ) d'une matrice en les combinant ensuite
6
par les mmes rgles qu'on utilise pour combiner des scalaires dans les matrices. Avec les
mmoires actuelles de plusieurs gigaoctets, cette question a perdu un peu de son intrt pratique,
mais reste trs prise en thorie des nombres, pour la dcomposition en produit de facteurs
premiers avec le crible gnral de corps de nombres (GNFS) (mthode Lanczos par blocs).
Utilisations []
Les espaces vectoriels forment le support et le fondement de l'algbre linaire. Ils sont aussi
prsents dans de nombreux domaines distincts. S'il n'est pas possible d'indiquer ici tous les cas
d'utilisation, on peut tout de mme citer pour les principales structures objet de thories, des
exemples significatifs. Leurs rles dans de vastes thories ne traitant pas d'une structure
particulire, comme celles des nombres algbriques ou de Galois peuvent aussi tre voqus.
Les espaces vectoriels utiliss sont d'une grande diversit. On y trouve les classiques espaces
vectoriels de dimension deux et trois sur les nombres rels, cependant la dimension peut tre
quelconque, mme infini. Les nombres complexes sont aussi trs utiliss, ainsi que les rationnels.
Il n'est pas rare qu'une partie des nombres rels ou complexes soit considr comme un espace
vectoriel rationnel. Le corps de base peut aussi contenir un nombre fini d'lments, dfinissant
parfois un espace vectoriel dont le cardinal est fini.
Les proprits gomtriques de la structure permettent la dmonstration de nombreux thormes.
Elles ne se limitent pas aux cas o l'espace est rel, mme dans le cas de corps plus insolites
comme les corps finis ou les extensions finies des rationnels, les proprits gomtriques
s'avrent parfois essentielles.
Groupe fini []
Article dtaill : Reprsentations d'un groupe fini.
Reprsentation du groupe symtrique d'ordre quatre comme groupe des rotations du cube dans
un espace vectoriel de dimension trois.
7
La classification des groupes finis est une vaste question, encore objet de recherche. Si le groupe
contient un petit nombre d'lments, les thormes de Sylow peuvent suffire pour en dterminer
la structure. Une mthode beaucoup plus puissante est ncessaire dans le cas gnral.
Georg Frobenius (1849-1917), la suite de travaux de Richard Dedekind (1831 1916) dveloppe une
nouvelle thorie
[1]
en 1896. Elle se fonde sur l'ide que l'ensemble des symtries d'un espace
vectoriel possde une structure de groupe. Il est toujours possible de reprsenter un groupe fini
par des symtries bien choisies sur un espace vectoriel de dimension suffisante. Un groupe est
ainsi incarn par des transformations gomtriques simples. Une telle incarnation prend le nom
de reprsentation d'un groupe.
Les espaces vectoriels choisis sont de dimension finie, en gnral sur le corps des complexes
[2]
,
cependant pour disposer de bonnes proprits arithmtiques le corps peut tre celui des
rationnels
[3]
ou encore utiliser des entiers algbriques comme pour la dmonstration du thorme
de William Burnside (1852-1927) sur les groupes rsolubles
[4]
. Richard Brauer (1901-1977) tudie
un cas trs abstrait, celui des reprsentations sur un espace vectoriel construit l'aide d'un corps
fini
[5]
.
Un exemple relativement simple d'utilisation de cette thorie est donn par Burnside , avec son
thorme sur les groupes de type fini et d'exposant fini
[6]
.
Anneau []
Article dtaill : thorie des anneaux.
Emmy Noether utilise la notion d'espace vectoriel pour tudier les anneaux portant maintenant
son nom.
Un exemple clbre d'anneau disposant aussi d'une structure d'espace vectoriel est celui des
polynmes coefficients dans un corps. Cet espace vectoriel, de dimension infinie, est largement
utilis en algbre linaire, travers par exemple le polynme minimal ou caractristique. Le
8
morphisme canonique entre les polynmes et les applications linaires d'un espace vectoriel est
l'origine d'une structure d'algbre qui est un anneau, si la multiplication externe est oublie.
Cette mthode permet d'lucider la structure de certains anneaux. Si la caractristique d'un
anneau est soit nulle soit gale un nombre premier, alors l'anneau est aussi un espace vectoriel
sur tout sous-anneau disposant d'une structure de corps. C'est par exemple le cas du plus petit
sous-anneau contenant l'unit. L'espace vectoriel ressemble la structure dveloppe par
Grassman. Cette remarque est utilise au dbut du XX
e
sicle, en particulier par Emil Artin (1898
- 1962) et Emmy Noether (1882 - 1935) pour lucider cette structure dans le cas des anneaux
artiniens et noethriens, qui sont des copies de sous-algbres sur un espace vectoriel construit sur
sous-anneau qui s'avre tre un corps.
Un exemple est la gnralisation du thorme de Joseph Wedderburn (1882 - 1948) par Artin et
portant maintenant le nom d'Artin-Wedderburn. Il est important pour l'tude des algbres non
commutatives, ce thorme permet, par exemple, de construire le corps des quaternions l'aide
d'une reprsentation du groupe associ sur un espace vectoriel rel de dimension quatre.
Thorie de Galois []
Article dtaill : Thorie de Galois.
Un pentagone en thorie de Galois est une figure d'un espace vectoriel rationnel de dimension
quatre. Le fait que la dimension soit une puissance de deux est une condition ncessaire pour une
construction la rgle et au compas.
La thorie de Galois contient de nombreux exemples d'espaces vectoriels. Elle consiste tudier
un corps comme un espace vectoriel sur un sous-corps. Ainsi chaque sous-corps permet de
considrer la structure initiale comme un espace vectoriel particulier.
Un exemple d'application est celui des figures constructible la rgle et au compas. Ces points
forment un corps disposant d'une structure d'espace vectoriel sur les nombres rationnels. Il est de
dimension infinie et, pour chaque points, le plus petit sous-corps le contenant est de dimension
finie gale une puissance de deux. Un tel sous-corps est appel une tour d'extension
9
quadratique. Cette proprit de ces espaces vectoriel permet de rsoudre d'antiques conjectures
comme la duplication du cube, la trisection de l'angle ou la construction d'un polygone rgulier.
L'exemple historique de la thorie est celui de la rsolution d'une quation polynomiale. Le
thorme d'Abel donne une condition ncessaire et suffisante de rsolution par radicaux. Les
espaces vectoriels utiliss ont pour lments ceux du plus petit corps L contenant tous les
coefficients du polynme ainsi que ses racines et le corps sous-jacent est un sous-corps K du
premier contenant tous les coefficients. Le groupe de Galois est compos des automorphismes du
corps L et laissant invariant le corps K. Il correspond un nombre fini de symtries de l'espace
vectoriel. L'lment cl de la dmonstration montre que l'quation est rsoluble seulement si ces
symtries sont diagonalisables.
Proprits mtriques des droites et plans
En gomtrie euclidienne, c'est--dire dans le plan et l'espace muni d'une distance et d'un produit
scalaire, les droites et les plans possdent des proprits mtriques permettant de les
caractriser grce un point et un vecteur, dit normal. On peut aussi calculer la distance qui les
spare d'un point donn ou bien calculer celle qui spare deux droites ou deux plans. On peut
aussi calculer l'angle form par deux droites ou deux plans.
Dans cet article, on a muni le plan ou l'espace d'un repre orthonormal dans lequel sont
exprimes toutes les coordonnes. Toute droite du plan y possde une quation du type ux + vy
+ h = 0 o (u , v) est diffrent de (0 , 0) et tout plan de l'espace possde une quation de la forme
ux + vy + wz + h = 0 o (u, v, w) est diffrent de (0, 0, 0)
La droite dans le plan euclidien []
Vecteur normal une droite []
Soit M(x,y) un point de la droite D dont une quation dans un repre orthonormal est donne
par :
et M
0
(x
0
,y
0
) un point spcifique de D, On a :
En retranchant (2) (1) on obtient :
En notant , le vecteur de coordonnes (u, v), on exprime (1) comme suit :
10
La droite d'quation ux + vy + h = 0 est donc orthogonale au vecteur . Le vecteur est appel
un vecteur normal la droite D
Droite passant par un point et orthogonale un vecteur non nul donn []
Soit un point M(x,y) et un vecteur non nul. Le point M appartient la droite D, passant
par M
0
(x
0
,y
0
) et orthogonale , si et seulement si :
La droite D, passant par M
0
(x
0
,y
0
) et orthogonale , a donc pour quation : :
Distance algbrique d'un point M(x,y) une droite d'quation ux + vy + h = 0 []
Soit H la project de M(x,y) sur D avec orthogonal D.
La droite perpendiculaire D et passant par M tant oriente suivant la direction du vecteur
, on montre que la distance algbrique entre M et D est donne par :
En valeur absolue:
Droite et pente []
Pour v non nul, la droite D d'quation ux + vy + h = 0 possde une quation sous la forme mx + b
= y avec
11
et
La pente d'une droite est le rel
L'angle reprsente l'angle entre l'axe des abscisses et la droite D.
quation normale d'une droite []
Dans le repre ,notons un vecteur unitaire normal la droite D, orient de O
vers D, la valeur reprsente alors l'angle . On note d'autre part p la distance entre l'origine
O du repre et la droite D.
L'quation (1) s'crit :
Angles de deux droites []
Soit D et D' deux droites d'quations
L'angle form par les deux droites est connu par sa tangente:
La droite dans l'espace euclidien []
Distance d'un point M une droite quelconque D de l'espace []
Article dtaill : Distance d'un point une droite.
Cas o la droite est dfinie par l'intersection de deux plans []
12
le plan perpendiculaire appartient au faisceau de plans
sera perpendiculaire pour
Soit les projections orthogonales du point respectivement sur , on en
dduit
On calculera et comme dtaill au chapitre "Distance algbrique d'un point un
plan" ci dessous.
Cas o la droite est dfinie par un point M0 et un vecteur non nul []
La distance MH est donne par
Droites orthogonales un plan []
Le plan tant dfini par l'quation ux + vy + wz + h = 0, les droites perpendiculaires au plan sont
toutes les droites ayant comme vecteur directeur . Une droite D passant par le point
M
0
(x
0
,y
0
,z
0
) et perpendiculaire [P]:ux + vy + wz + h = 0 a pour quations :
dans le cas o aucun des rels, u, v, w, n'est nul.
Si un seul des des rels est nul , par exemple u= 0, le systme devient :
13
Si deux rels sont nuls, par exemple u=v=0, le systme devient :
Distance entre deux droites quelconque de l'espace []
Soient la droite (D
0
) passant par M
0
(x
0
,y
0
,z
0
) et de direction le vecteur et (D
1
) la
droite passant par M
1
(x
1
,y
1
,z
1
) et de direction
Si les vecteurs et sont indpendants, le volume du solide construit sur est
gal | k | . Ce rel se calcule grce au produit mixte :
L'aire de la base du solide est donne par
tel que
La distance entre les deux droites est alors gale
Si les vecteurs sont colinaires alors les deux droites sont parallles et la distance qui les spare
correspond la distance qui spare le point M
1
de la droite D
0
Le plan dans l'espace euclidien []
Vecteur orthogonal un plan []
Soit M(x,y,z) un point du plan P dont l'quation dans un repre orthonorm est donne par :
Pour M
0
(x
0
,y
0
,z
0
) un point spcifique de P on obtient :
En retranchant (2bis) (1bis) on obtient :
14
En notant , le vecteur de coordonnes (u,, v , w), on exprime (1bis) comme suit :
Le plan P d'quation ux + vy + wz + h = 0 est donc orthogonal au vecteur et ce
vecteur est appel un vecteur normal au plan P.
Plan passant par un point et orthogonal un vecteur non nul donn []
Soit un point et un vecteur non nul. Le point M appartient au plan P,
passant par et orthogonal , si et seulement si :
Le plan P, passant par M
0
(x
0
,y
0
,z
0
) et orthogonal , a donc pour quation : :
Distance algbrique d'un point M(x,y,z) un plan P d'quation ux + vy + wz + h =
0 []
Article dtaill : Distance d'un point un plan.
Soit H la projet de M(x,y,z) sur P avec orthogonal P.
La droite perpendiculaire P et passant par M tant oriente suivant la direction du vecteur
, on montre que la distance algbrique entre M et P est donne par :
En valeur absolue:
Angles de deux plans []
Soitent (P) et (P') deux plans d'quations
15
L'angle gomtrique (P,P') est dtermin l'aide de l'angle des vecteurs normaux
Plans perpendiculaires []
Les plan (P) et (P') sont perpendiculaires si les vecteurs normaux et sont orthogonaux. Ce
qui implique
quation de plan et dterminant []
Plan dfini par un point et deux vecteurs non colinaires []
Soient un point M
0
(x
0
,y
0
,z
0
) et deux vecteurs et non colinaires. Un point M (x, y, z)
appartient au plan P passant par M
0
(x
0
,y
0
,z
0
) et de directions et si et seulement si il existe
deux rels et tels que . Cette galit exprime que
sont coplanaires.
Ce qui donne, en reprsentant le produit mixte de ces trois vecteurs sous la forme d'un
dterminant :
Son quation est :
que l'on peut crire sous la forme ux + vy + wz + h = 0
16
Plan dfini par deux points et un vecteur []
Soient deux points M
1
(x
1
,y
1
,z
1
),M
2
(x
2
,y
2
,z
2
) et un vecteur non colinaire .
Le point M appartient au plan passant par M
1
(x
1
,y
1
,z
1
),M
2
(x
2
,y
2
,z
2
) et de direction si et
seulement si les trois vecteurs : sont coplanaires, donc :
Son quation est :
Plan dfini par trois points non aligns []
Soient M
1
(x
1
,y
1
,z
1
),M
2
(x
2
,y
2
,z
2
),,M
3
(x
3
,y
3
,z
3
), trois points non aligns.
Par analogie avec ce qui prcde, L'quation du plan passant par ces trois point est
Dterminant (mathmatiques)
En mathmatiques, initialement introduit en algbre pour dterminer le nombre de solutions d'un
systme d'quations linaires, le dterminant se rvle un outil trs puissant dans de nombreux
domaines (tude d'endomorphisme, recherche de valeurs propres, calcul diffrentiel). C'est ainsi
qu'on dfinit le dterminant d'un systme d'quations, le dterminant d'un endomorphisme ou le
dterminant d'un systme de vecteurs.
Comme pour de nombreuses oprations, le dterminant peut tre dfini par une collection de
proprits (axiomes) qu'on rsume par le terme forme n-linaire alterne . Cette dfinition
17
permet d'en faire une tude thorique complte et d'largir encore ses champs d'applications.
Mais le dterminant peut aussi se concevoir comme une gnralisation l'espace de dimension n
de la notion de surface ou de volume orients. Cet aspect, souvent nglig, est une approche
pratique et clairante des proprits du dterminant.
Histoire des dterminants []
Les dterminants furent introduits en Occident partir du XVI
e
sicle, soit bien avant les
matrices, qui n'apparaissent qu'au XIX
e
sicle. Il convient de rappeler que les Chinois furent les
premiers utiliser des tableaux de nombres et appliquer un algorithme maintenant connu sous
le nom de procd d'limination de Gauss-Jordan.
Premiers calculs de dterminants []
Dans son sens originel, le dterminant dtermine l'unicit de la solution d'un systme d'quations
linaires. Il fut introduit dans le cas de la taille 2 par Cardan en 1545 dans son Ars Magna, sous
forme d'une rgle pour la rsolution de systmes de deux quations deux inconnues
[1]
. Cette
premire formule porte le nom de regula de modo.
Le japonais Kowa Seki introduit le premier des dterminants de taille 3 et 4, la mme poque que
l'Allemand Leibniz.
L'apparition des dterminants de taille suprieure demande ensuite plus de cent ans.
Curieusement le Japonais Kowa Seki et l'Allemand Leibniz en donnrent les premiers exemples
presque simultanment
[rf. ncessaire]
.
Leibniz tudie de nombreux systmes d'quations linaires. En l'absence de notation matricielle,
il reprsente les coefficients inconnus par un couple d'indices : il note ainsi ij pour a
i, j
. En 1678,
il s'intresse un systme de trois quations et trois inconnues et donne, sur cet exemple, la
formule de dveloppement suivant une colonne. La mme anne, il crit un dterminant de taille
18
4, correct aux signes prs
[2]
. Leibniz ne publie pas ces travaux, qui semblent avoir t oublis
avant que les rsultats soient redcouverts indpendamment une cinquantaine d'annes plus tard.
la mme priode, Kowa Seki publie un manuscrit sur les dterminants, o il nonce une
formulation gnrale difficile interprter. Celle-ci semble donner des formules correctes pour
des dterminants de taille 3 et 4, et de nouveau des signes errons pour les dterminants de taille
suprieure
[3]
. La dcouverte restera sans lendemain, cause de la coupure du Japon avec le
monde extrieur.
Dterminants de taille quelconque []
En 1748, un trait d'algbre posthume de MacLaurin relance la thorie des dterminants, avec
l'criture correcte de la solution d'un systme de quatre quations et quatre inconnues
[4]
.
En 1750, Cramer formule les rgles qui permettent de rsoudre un systme de n quations et n
inconnues, mais sans en donner la dmonstration
[5]
. Les mthodes de calcul des dterminants
sont alors dlicates, puisque fondes sur la notion de signature d'une permutation
[6]
.
Les mathmaticiens s'emparent de ce nouvel objet, avec des articles de Bzout en 1764
[7]
, de
Vandermonde en 1771
[8]
(tonnamment ne donnant pas le calcul du dterminant de la matrice de
Vandermonde actuelle
[9]
). En 1772, Laplace tablit les formules de rcurrence portant son nom.
L'anne suivante, Lagrange dcouvre le lien entre le calcul des dterminants et des volumes
[10]
.
Gauss utilise pour la premire fois le mot dterminant , dans les Disquisitiones arithmeticae
en 1801. Il l'emploie pour ce que nous qualifions aujourd'hui de discriminant d'une quadrique et
qui est un cas particulier du dterminant moderne. Il est galement prs d'obtenir le thorme sur
le dterminant d'un produit.
[11]
Mise en place de la notion moderne de dterminant []
Cauchy emploie le premier le mot dterminant dans son sens moderne. On peut ainsi lire dans
son article de synthse de plus de quatre-vingts pages sur cette question :
M. Gauss s'en est servi avec avantage dans ses Recherches analytiques pour dcouvrir les
proprits gnrales des formes du second degr, c'est--dire des polynmes du second degr
deux ou plusieurs variables, et il a dsign ces mmes fonctions sous le nom de dterminants. Je
conserverai cette dnomination qui fournit un moyen facile d'noncer les rsultats ; j'observerai
seulement qu'on donne aussi quelquefois aux fonctions dont il s'agit le nom de rsultantes deux
ou plusieurs lettres. Ainsi les deux expressions suivantes, dterminant et rsultante, devront
tre regardes comme synonymes.
[12]
Elle reprsente une synthse des connaissances antrieures, ainsi que des propositions nouvelles
comme le fait que l'application transpose ne modifie pas le dterminant ainsi que la formule du
dterminant d'un produit. Binet propose galement une dmonstration cette mme anne. Plus
tard, Cauchy jette les bases de l'tude de la rduction d'endomorphismes
[13]
.
19
En publiant ses trois traits sur les dterminants en 1841 dans le journal de Crelle, Jacobi donne
une vritable notorit la notion
[11]
. Pour la premire fois, il prsente des mthodes de calcul
systmatiques, sous forme algorithmique. Il devient galement possible d'valuer des
dterminants de fonctions avec la naissance du jacobien.
De 1832 1844, les travaux de Grassmann, fondent l'algbre extrieure et donnent un sens plus
gnral aux dterminants au travers de la reprsentation des Grassmanniennes
Le cadre matriciel est introduit par les travaux de Cayley et Sylvester. Cayley est galement
l'inventeur de la notation des dterminants par des barres verticales ; il tablit la formule de
calcul de l'inverse.
La thorie s'toffe par l'tude de dterminants ayant des proprits de symtrie particulires et
par l'introduction du dterminant dans de nouveaux champs des mathmatiques, comme le
wronskien pour les quations diffrentielles linaires.
Premiers exemples : aires et volumes []
Les calculs d'aires et de volumes sous forme de dterminants dans des espaces euclidiens
apparaissent comme des cas particuliers de la notion plus gnrale de dterminant. Pour les
distinguer, la lettre majuscule D (Det) leur est parfois rserve.
Dterminant de deux vecteurs dans le plan euclidien []
Fig. 1. Le dterminant est l'aire bleue oriente.
20
Soit P le plan euclidien orient usuel. Le dterminant des vecteurs X et X' est donn par
l'expression analytique
ou, de faon quivalente, par l'expression gomtrique
dans laquelle est l'angle orient form par les vecteurs X et X'.
Proprits []
La valeur absolue du dterminant est gale l'aire du paralllogramme dfini par X et X' (X'sin
est en effet la hauteur du paralllogramme, d'o Aire = Base Hauteur).
Le dterminant est nul si et seulement si les deux vecteurs sont colinaires (le paralllogramme
devient une ligne).
En effet cette annulation apparat comme un simple test de proportionnalit des composantes
des vecteurs par produit en croix.
Son signe est strictement positif si et seulement si la mesure de l'angle (X,X') est comprise dans
l'intervalle ]0,[.
L'application dterminant est bilinaire : la linarit par rapport au premier vecteur s'crit
et celle par rapport au second vecteur s'crit
Fig. 2. Somme des aires de deux paralllogrammes adjacents.
21
La figure 2, dans le plan, illustre un cas particulier de cette formule. Elle reprsente deux
paralllogrammes adjacents, l'un dfini par les vecteurs u et v (en vert), l'autre par les vecteurs u'
et v (en bleu). Il est ais de visualiser sur cet exemple l'aire du paralllogramme dfini par les
vecteurs u+u' et v (en gris) : elle est gale la somme des aires des deux paralllogrammes
prcdents, laquelle est enleve l'aire d'un triangle, et ajoute l'aire d'un autre triangle. Les deux
triangles se correspondant par translation, la formule suivante est vrifie det(u + u',v) = det(u,v)
+ det(u',v).
Ce dessin correspond un cas particulier de la formule de bilinarit puisque les orientations ont
t choisies de faon ce que les aires aient le mme signe, mais il aide en saisir le contenu
gomtrique.
Gnralisation []
Il est possible de dfinir la notion de dterminant dans un plan euclidien orient muni d'une base
orthonormale directe B, en utilisant les coordonnes des vecteurs dans cette base. Le calcul de
dterminant donne le mme rsultat quelle que soit la base orthonormale directe choisie pour le
calcul.
Dterminant de trois vecteurs dans l'espace euclidien []
Soit E l'espace euclidien orient usuel de dimension 3. Le dterminant de trois vecteurs de E est
donn par
Fig. 3. Illustration graphique de la trilinarit.
Ce dterminant porte encore le nom de produit mixte.
22
Proprits []
La valeur absolue du dterminant est gale au volume du paralllpipde dfini par les trois
vecteurs.
Le dterminant est nul si et seulement si les trois vecteurs sont contenus dans un mme plan
(paralllpipde plat ).
L'application dterminant est trilinaire : notamment
det(aX + bY,X',X'') = adet(X,X',X'') + bdet(Y,X',X'')
Une illustration gomtrique de cette proprit est donne en figure 3, par deux paralllpipdes
adjacents, c'est--dire possdant une face commune. L'galit suivante devient intuitive
det(u + u',v,w) = det(u,v,w) + det(u',v,w).
Interprtation du signe du dterminant : orientation []
Article dtaill : orientation (mathmatiques).
Dans le plan, le signe du dterminant s'interprte comme le signe de l'angle orient.
Dans l'espace trois dimensions, le cube unit sert de rfrence. Son dterminant vaut un. Un
paralllpipde non plat possde un dterminant positif s'il est possible de l'obtenir en dformant
continment, sans jamais l'aplatir, le cube unit.
Le dterminant est au contraire ngatif s'il est ncessaire d'appliquer en plus une symtrie, cest-
-dire si le cube unit ne peut tre obtenu qu'en dformant le paralllpipde, puis en observant
le rsultat de cette dformation dans un miroir.
Fig. 4. Il est possible de passer du cube jaune au paralllpipde vert par dformation continue. Ce n'est
pas possible pour le paralllpipde rouge qui est l'image miroir du vert.
Approche intuitive du dterminant d'une application linaire []
23
Une application linaire est une application qui transforme les coordonnes d'un vecteur de
manire linaire. Par exemple dans l'espace de dimension 3, l'application est linaire si les
coordonnes x, y et z d'un vecteur ont pour image x', y' et z' avec :
o a, b,c,..., i sont des nombres. La figure suivante illustre deux cas de telles applications
linaires.
Dans le premier cas, le cube jaune est transform en un paralllpipde illustr en vert. Dans le
deuxime cas, le cube jaune est transform en un volume aplati, un carr rouge (c'est--dire que
certains des sommets du cube initial ont la mme image par l'application linaire). Ces deux cas
correspondent des situations diffrentes en mathmatique. La premire fonction du dterminant
est de fournir un moyen de sparer ces cas.
Fig. 5. Exemple d'applications linaires: La premire transforme le cube jaune en un volume vert la
seconde en un volume aplati rouge.
Pour tre plus prcis, le dterminant d'une application linaire est un nombre, qui reprsente un
facteur multiplicatif pour les volumes. Si le cube jaune est de volume 1, alors le volume de
l'image du cube vert est la valeur absolue du dterminant de la premire application. La
deuxime application a un dterminant nul, ce qui correspond un aplatissement des volumes.
Le signe du dterminant est positif s'il est possible de dformer continment le cube jaune pour
obtenir le vert. Il est au contraire ngatif s'il est ncessaire d'y appliquer en plus une symtrie.
En fait cette proprit n'est pas uniquement vraie pour le cube unit jaune. Tout volume
transform par une application linaire est multipli par la valeur absolue du dterminant.
Le dterminant existe pour les applications linaires d'un espace dans lui mme dans le cas de
toutes les dimensions finies. En effet, la notion de volume peut tre gnralise : ainsi un
hypercube ayant ses artes de longueur 2 dans un espace euclidien de dimension n aurait un
24
dterminant (sorte d' hypervolume ) de 2
n
. En revanche si l'espace contient une infinit de
dimensions, alors le dterminant n'a plus de sens.
Cadre d'utilisation []
Dterminant et quations linaires []
Il existe un cas de calcul numrique trs frquent pour les ingnieurs, les physiciens ou les
conomistes. Il s'agit de la rsolution d'un systme d'quations linaires. Si le systme possde
autant d'quations que de variables, on peut esprer avoir l'existence et l'unicit d'une solution.
Mais ce n'est pas toujours le cas, par exemple en cas de rptition de la mme quation, plusieurs
solutions conviendront.
Plus prcisment, un systme de n quations et n inconnues peut tre associ un dterminant.
L'existence et l'unicit de la solution est obtenue si et seulement si le dterminant est diffrent de
0. Ce problme est l'origine historique de l'introduction des dterminants.
Il est possible, non seulement de garantir l'existence et l'unicit de la solution, mais la rgle de
Cramer fournit un calcul exact de la solution l'aide de dterminants. Cette mthode n'est ni la
plus rapide, ni la plus simple, elle est peu pratique pour les calculs explicites, elle est nanmoins
utile pour tablir certains rsultats thoriques, telle que la dpendance par rapport aux
paramtres.
Lien avec l'aplatissement des volumes []
Un systme de 3 quations linaires 3 inconnues peut tre mis sous forme d'une quation
linaire u(X)=B o X=(x, y,z) est un vecteur dont les composantes sont les inconnues du systme,
u une application linaire de l'espace et B un vecteur. La rsolution du systme peut tre
formule de faon gomtrique : le vecteur B est-il l'image d'un certain vecteur X par u ? Ce
dernier est-il unique ? Le dterminant de u apporte la rponse : l'existence et l'unicit sont
obtenues si et seulement s'il est non nul.
La figure 5 permet une approche intuitive de ce rsultat. Il suffit de considrer un pavage de
l'espace par le cube jaune et ses images par des translations selon les trois directions. Une famille
de cubes jaunes adjacents remplissent alors tout l'espace.
Si le dterminant n'est pas nul, alors l'image de ce pavage est un pavage de paralllpipdes de
couleur verte, remplissant galement tout l'espace. Ceci signifie que tous les vecteurs de
l'espace sont des vecteurs images. Notamment, l'inconnue est bien recouverte par l'un des
volumes verts. Elle est image d'un vecteur.
En revanche, si le dterminant est nul, alors l'image du pavage ne remplit pas l'espace entier.
Dans l'exemple du cube aplati rouge, elle ne remplit qu'un plan. Certains vecteurs ne sont jamais
atteints, les autres sont l'image de plusieurs vecteurs la fois.
Plus gnralement, pour un systme de n quations et n inconnues, le dterminant indique si les
images par u remplissent l'espace entier ou seulement un sous-espace.
25
Dterminant et rduction []
Les applications linaires apparaissent non seulement en gomtrie lmentaire mais aussi dans
de nombreux domaines avancs comme certaines rsolutions d'quations diffrentielles, la
dfinition d'algorithmes rapides ou la rsolution de problmes thoriques. Il est important de
comprendre leur comportement.
Un outil d'analyse fcond consiste rpertorier les axes privilgis, selon lesquels l'application
se comporte comme une dilatation, multipliant les longueurs des vecteurs par une constante. Ce
rapport de dilatation est appel valeur propre et les vecteurs auxquels il s'applique vecteurs
propres.
Le phnomne d'aplatissement des volumes peut tre mesur par un dterminant. Il correspond
au cas o, selon une certaine direction, les vecteurs sont multiplis par un rapport de dilatation
gal 0 (valeur propre nulle). Plus gnralement, toutes les valeurs propres peuvent tre
obtenues par le calcul d'un dterminant paramtre, appel polynme caractristique.
Dterminant et intgrale multiple []
Fig. 6. Jacobien.
Ainsi que le montre l'approche intuitive, le dterminant caractrise la modification de volume
d'un paralllpipde par un endomorphisme. L'intgrale multiple est un outil de dtermination
des volumes dans le cas gnral. Elle utilise la notion de dterminant dans le cadre du
changement de variables. Il prend alors le nom de jacobien. Il peut tre imagin comme le
rapport des volumes lmentaires avant et aprs changement de variables, en usant de la
terminologie des lments diffrentiels.
Plus prcisment, le comportement d'une application diffrentiable au voisinage d'un point est au
premier ordre, analogue en termes de modification de volume, une application linaire ayant
comme dterminant le jacobien.
Dterminant et amortissement dans les quations diffrentielles []
26
Fig. 7. Exemple du pendule de longueur variable, sans amortissement. En bleu et en rouge sont
reprsentes deux solutions particulires, dans l'espace des phases. L'aire forme par les deux solutions
reste constante au cours du temps
En physique, notamment en mcanique du point, l'quation diffrentielle linaire d'ordre deux est
frquente. Elle se prsente sous la forme y'' = ay' + by + c, dans laquelle a,b,c peuvent tre des
coefficients constants ou plus gnralement des fonctions (par exemple du temps). Le terme a est
appel facteur d'amortissement.
Cette quation diffrentielle est associe un dterminant, appel wronskien. Il s'interprte
comme une aire dans le plan (y, y') appel espace des phases par les physiciens. Cette aire reste
constante au cours du temps si le terme d'amortissement est nul, elle dcrot de faon
exponentielle s'il est strictement positif. S'il n'est pas toujours possible d'exhiber une solution
explicite, le wronskien est toujours calculable.
Le wronskien peut tre gnralis toutes les quations diffrentielles linaires.
Dfinition du dterminant []
Origine de la construction du dterminant []
Les notions de paralllogramme et de paralllpipde sont gnralises un espace vectoriel E
de dimension finie n sur . n vecteurs x
1
, ..., x
n
de E est associ un paralllotope. Il est dfini
comme la partie de E forme par l'ensemble des combinaisons des x
i
coefficients compris entre
0 et 1
Il convient de voir dans ce paralllotope une sorte de pav oblique.
Lorsque l'espace est muni d'un produit scalaire, il est possible de dfinir le volume de ce
paralllotope, parfois appel son hypervolume pour souligner que la dimension de l'espace
concern n'est pas forcment 3. Il vrifie les proprits suivantes :
27
les volumes de deux pavs adjacents par une face, s'ajoutent
la multiplication d'un des vecteurs dfinissant le pav par une constante induit la multiplication
du volume par cette constante
le volume d'un pav form par la rptition du mme vecteur (ce qui constitue un cas particulier
de pav plat), est nul.
Un changement de produit scalaire sur l'espace E modifie les mesures de longueurs, angles, et
par consquent de volumes. Cependant la thorie des dterminants montrera qu' une constante
multiplicative prs, il n'existe qu'une unique mthode de calcul des volumes dans un espace
vectoriel de dimension n.
En reprenant un espace vectoriel sans structure particulire, la notion de dterminant a pour
objectif de donner un sens intrinsque au volume du paralllotope, sans rfrence un
produit scalaire par exemple, c'est--dire de construire une fonction f, qui x
1
, ..., x
n
associe un
rel, et vrifie les proprits prcdentes. Une telle application est appele une forme n-linaire
alterne.
Formes n-linaires alternes []
La notion de forme n-linaire alterne gnralise les proprits prcdentes. Elle se dfinit
comme une application de E
n
dans , qui est :
linaire en chaque variable. Ainsi pour des vecteurs x
1
, ..., x
n
, x'
i
et deux scalaires a et b
alterne, signifie qu'elle s'annule chaque fois qu'elle est value sur un n-uplet contenant deux
vecteurs identiques
L'article application multilinaire procde l'tude systmatique des formes n-linaires alternes
sur un espace vectoriel de dimension n.
Le rsultat principal est la possibilit de ramener le calcul de l'image de (x
1
,...,x
n
) celui d'images
des vecteurs de base par n-linarit. En outre le caractre altern permet de changer l'ordre des
vecteurs, de sorte qu'il suffit de connatre l'image f(e
1
,...,e
n
) des vecteurs d'une base, pris dans
l'ordre, pour connatre f. Remettre les vecteurs dans l'ordre fait intervenir la notion de
permutation.
Thorme
L'ensemble A
n
(E) des formes n-linaires alternes sur un espace vectoriel de dimension n
constitue un espace vectoriel de dimension 1.
28
De plus, si est une base de E, on peut exprimer l'image d'un n-uplet de vecteurs par
avec X
ij
la i-me composante de x
j
et qui dnote la signature de la permutation (un pour
une permutation paire, -1 pour une impaire).
Dterminant d'une famille de n vecteurs dans une base []
Dfinition
On suppose E muni d'une base . L'application dterminant en base B est
l'unique forme n-linaire alterne sur E vrifiant det
B
(e
1
,...,e
n
) = 1, abrg en det
B
(B) = 1
Il faut se reprsenter cette quantit comme une sorte de volume de pav, relativement la base B.
Formule de Leibniz
Gottfried Leibniz introduit les premiers dterminants de taille 3 et plus
Soient x
1
,...x
n
des vecteurs de E. Il est possible de reprsenter ces n vecteurs par n matrices
colonnes, formant par juxtaposition une matrice carre X.
Le dterminant de x
1
,...x
n
relativement la base B vaut alors
29
Cette formule porte parfois le nom de Leibniz. Elle prsente peu d'intrt pour le calcul pratique
des dterminants, mais permet d'tablir plusieurs rsultats thoriques.
En physique, on rencontre souvent la formule de Leibniz exprime l'aide du symbole de Levi-
Civita, en utilisant la convention d'Einstein pour la sommation des indices :
Formule de changement de base
Si B et B sont deux bases de E, les applications dterminants correspondantes sont
proportionnelles (avec un rapport non nul)
Ce rsultat est conforme l'interprtation en termes de volume relatif.
Dterminant d'une matrice []
Article dtaill : Calcul du dterminant d'une matrice.
Soit une matrice A=(a
ij
) carre dordre n coefficients rels. Les vecteurs colonnes de la matrice
peuvent tre identifis des lments de l'espace vectoriel . Ce dernier est muni d'une base
canonique.
Il est alors possible de dfinir le dterminant de la matrice A comme le dterminant du systme
de ses vecteurs colonnes relativement la base canonique. Il est not det(A) puisqu'il n'y a pas
d'ambigut sur la base de rfrence.
Par dfinition mme, le dterminant dpend de faon linaire de chaque colonne, et est nul
lorsque deux colonnes sont gales. Le dterminant de la matrice identit vaut un. Enfin il vrifie
la formule de Leibniz
Ce dterminant se note frquemment avec des barres verticales :
30
La prsentation matricielle apporte une proprit essentielle : une matrice a mme dterminant
que sa transpose
Ce qui signifie que le dterminant de A se voit aussi comme le dterminant du systme des
vecteurs lignes, relativement la base canonique.
[Drouler]
Formule du dterminant de la transpose - dmonstration
Dterminant d'un endomorphisme []
Soit u un endomorphisme d'un espace vectoriel de dimension finie. Toutes les matrices
reprsentatives de u ont le mme dterminant. Cette valeur commune est appele dterminant de
u.
Le dterminant de u est la valeur par laquelle u multiplie les dterminants de vecteurs
[Drouler]
Dmonstration de ces deux proprits
Notamment les endomorphismes de dterminant 1 conservent le dterminant des vecteurs. Ils
forment un sous groupe de Gl(E), not Sl(E), et appel groupe spcial linaire. Dans un espace
rel de dimension deux, ils se conoivent comme les applications linaires conservant les aires
orientes, en dimension trois les volumes orients.
On dmontre que ce groupe est engendr par les transvections, dont la matrice dans une base
adapte est de la forme
31
Effet d'une transvection dans l'espace (conservation du volume)
Fig. 8. Cube avant transvection
Fig. 9. Cube aprs transvection
Par construction mme du dterminant des endomorphismes, deux matrices semblables ont
mme dterminant.
Proprits []
Quitte effectuer le choix d'une base, il est possible d'noncer ces proprits dans le cadre
matriciel.
Caractre n-linaire altern []
L'application dterminant sur les familles de vecteurs est une forme multilinaire alterne.
Utiliser cette proprit sur une matrice demande d'exprimer le systme de vecteurs colonnes, ou
de vecteurs lignes.
Par exemple si la matrice A admet pour colonnes C
1
, ..., C
n
avec C
i
de la forme C
i
=aC '
i
+C ' '
i
Voici l'effet des oprations lmentaires sur les colonnes de la matrice
32
multiplier une colonne par a, entrane la multiplication du dterminant par la mme valeur
changer deux colonnes, entrane la multiplication du dterminant par -1
ajouter une colonne une combinaison linaire des autres colonnes ne modifie pas le
dterminant.
Notamment, si toutes les colonnes sont multiplies par a, le rsultat est une multiplication par a
n
du dterminant
En revanche, il n'existe pas de formule simple exprimant le dterminant de la somme A+B de
deux matrices. En effet, appliquer la multilinarit par rapport aux colonnes demande d'crire les
colonnes de la somme comme A
i
+B
i
, puis d'appliquer n fois la proprit de linarit. Finalement,
le dterminant de A+B se scinde en une somme de 2
n
dterminants hybrides det(A
1
, A
2
, B
3
, A
4
,...,
B
n
), forms d'un certain nombre de colonnes de A et de B.
Il est possible d'effectuer galement des oprations lmentaires sur les lignes, qui ont les mmes
proprits que les oprations sur les colonnes. Oprer sur les lignes suivant la technique du pivot
de Gauss fournit une mthode systmatique de calcul des dterminants ; c'est la mthode la plus
efficace en rgle gnrale.
Article dtaill : Calcul des dterminants.
Proprits de morphisme et d'annulation []
Augustin Louis Cauchy prouve que le dterminant constitue un morphisme de groupes
Cas d'annulation des dterminants
33
le dterminant d'un systme de n vecteurs est nul si et seulement si ce systme est li (et ceci
est valable quelle que soit la base de rfrence)
le dterminant d'une matrice (ou d'un endomorphisme) est nul si et seulement si cette matrice
(ou endomorphisme) est non inversible.
Ces proprits expliquent le rle essentiel que peuvent jouer les dterminants en algbre linaire.
Ils constituent un outil fondamental pour prouver qu'une famille de vecteurs est une base.
Dmonstration du cas d'annulation
si le systme est li, une colonne est combinaison linaire des autres. Par une opration
lmentaire, il est possible de se ramener un dterminant ayant une colonne nulle,
donc nul.
si le systme est libre, il est possible de le considrer comme une base B' et lui appliquer
la formule de changement de bases : det
B
(B ').det
B '
(B)=1.
Proprit de morphisme
ainsi si M est inversible alors
et le dterminant est un morphisme de groupes de dans
Dmonstration de la proprit de morphisme
La double application de la formule pour l'image d'une famille de vecteurs donne le rsultat, en
prenant les vecteurs images des vecteurs de la base B eux-mmes
Il existe une gnralisation de la formule de dterminant d'un produit pour le cas de deux
matrices rectangulaires : c'est la formule de Binet-Cauchy.
Cofacteurs et formule de rcurrence []
Article dtaill : Comatrice.
Soit A une matrice carre de taille n, et A(x) la matrice dont les coefficients sont les mmes que
ceux de A, sauf le terme d'indice i, j qui vaut a
i, j
+x (c'est la modification d'un des coefficients de
la matrice, toutes choses gales par ailleurs). Par la formule de linarit pour la j-me colonne, il
est possible d'tablir
34
Le terme not Cof
i, j
est appel cofacteur d'indice i, j. Il se calcule de la faon suivante : en
notant M(i;j) le dterminant de la sous-matrice dduite de M par suppression la ligne i et la
colonne j, le cofacteur est (-1)
i+j
fois M(i;j).
Il admet les interprtations suivantes
augmenter de x le coefficient d'indice i, j de la matrice (toutes choses gales par ailleurs) revient
augmenter le dterminant de x fois le cofacteur correspondant
le cofacteur est la drive du dterminant de la matrice A(x)
Formules de Laplace
Pierre-Simon Laplace
Si n>1 et A est une matrice carre de taille n alors il est possible de calculer son dterminant en
fonction des coefficients d'une seule colonne et des cofacteurs correspondants. Cette formule,
dite formule de Laplace, permet ainsi de ramener le calcul du dterminant n calculs de
dterminants de taille n-1.
Formule de dveloppement par rapport la colonne j
35
On peut donner galement une formule de dveloppement par rapport la ligne i
Comatrice et calcul de l'inverse
La comatrice de A, est la matrice constitue des cofacteurs de A. Elle gnralise les formules de
dveloppement du dterminant par rapport aux lignes ou colonnes
La matrice transpose de la comatrice est appele matrice complmentaire de A. Notamment si
A est inversible, l'inverse de A est un multiple de la matrice complmentaire. Cette approche
offre une formule de la matrice inverse, ne ncessitant que des calculs de dterminants
Variations de la fonction dterminant []
La formule de Leibniz montre que le dterminant d'une matrice A s'exprime comme somme et
produit de composantes de A. Il n'est donc pas tonnant que le dterminant ait de bonnes
proprits de rgularit.
Dterminant dpendant d'un paramtre []
Si est une fonction de classe valeurs dans les matrices carres d'ordre n, alors
est galement de classe .
La formule de drivation s'obtient en faisant intervenir les colonnes de A
Cette formule est formellement analogue la drive d'un produit de n fonctions numriques.
36
Application dterminant sur l'espace des matrices []
L'application qui la matrice A associe son dterminant est continue.
Cette proprit prsente des consquences topologiques intressantes : ainsi le groupe GL
n
( )
est un ouvert, la loi de multiplication des matrices en fait un groupe de Lie, et le sous-groupe
est un ferm dans GL
n
( ).
Cette application est diffrentiable et mme .
Le dveloppement limit l'ordre un du dterminant au voisinage de A s'crit
C'est--dire que dans muni de son produit scalaire canonique, la comatrice s'interprte
comme le gradient de l'application dterminant
Notamment pour le cas o A est l'identit
Le caractre diffrentiable permet d'affirmer que est aussi un groupe de Lie.
Elle est aussi polynomiale, ce qui fait de GL
n
( ) une varit algbrique.
Ces formules portent parfois le nom d'identits de Jacobi. Elles sont tablies dans l'article
comatrice.
Gnralisation aux espaces vectoriels sur d'autres corps et
aux modules []
Les diffrentes dfinitions et proprits de la thorie des dterminants s'crivent de faon
identique dans le cadre des espaces vectoriels complexes et des matrices coefficients
complexes. Il en est de mme sur tout corps commutatif, sauf pour le paragraphe variations de
la fonction dterminant qui n'a alors pas de sens.
La quasi-totalit de la thorie des dterminants peut encore tre tendue aux matrices
coefficients dans un anneau commutatif A et aux modules libres de dimension finie sur A. Le
seul point de divergence est la caractrisation de l'annulation des dterminants.
37
Ainsi une matrice coefficients dans un anneau commutatif A est inversible si et seulement si
son dterminant est inversible dans A.
La question de l'algorithme de calcul du dterminant est reprendre. En effet, la mthode du
pivot de Gauss demande d'effectuer des divisions, ce qui n'est pas possible dans l'anneau A lui-
mme. Les formules de Leibniz ou de Laplace permettent de faire un calcul sans division, mais
restent trs coteuses. Il existe des algorithmes bien plus raisonnables, dont le temps d'excution
est d'ordre n
4
; notamment, l'algorithme du pivot de Gauss s'adapte dans le cas d'un anneau
euclidien, cette adaptation est dcrite dans l'article sur le thorme des facteurs invariants. Le site
de l'universit libre de Berlin propose un document de rfrence sur la question des algorithmes
sans division
Wronskien
Le wronskien, nomm ainsi en l'honneur de Josef Hon-Wronski, est le dterminant d'une
famille de solutions d'une quation diffrentielle linaire homogne y'=a.y. l'aide du
wronskien, il est possible de dterminer si cette famille constitue une base de l'espace des
solutions.
En outre, mme sans aucune information sur les solutions, l'quation d'volution du wronskien
est connue. Ceci donne une information quantitative prcieuse et offre mme une stratgie de
rsolution pour certaines quations diffrentielles.
Le wronskien peut tre galement dfini pour des quations diffrentielles linaires d'ordre
suprieur, puisqu'on peut les ramener l'ordre 1. Il est notamment trs utile la rsolution des
quations diffrentielles linaires homognes scalaires d'ordre 2 : y'' = ay' + by + c.
Wronskien pour une quation scalaire d'ordre deux []
Article dtaill : quation diffrentielle linaire d'ordre deux.
Soit l'quation diffrentielle E: y' '=ay'+by, dite quation linaire homogne scalaire d'ordre 2
sous forme rsolue, dans laquelle a,b sont des fonctions continues.
Si x
1
et x
2
sont deux solutions de cette quation, leur wronskien est dfini par
38
Exemple du pendule de longueur variable, sans amortissement.
L'quation est y ' ' = - ( 2 + 0,4 . cos t ) y
En bleu et en rouge sont reprsentes deux solutions particulires, dans l'espace des phases.
L'aire du triangle form par les deux solutions reste constante au cours du temps
Alors qu'il n'est pas toujours possible d'exhiber une solution explicite de l'quation diffrentielle
E, le wronskien peut tre dtermin. Il satisfait l'quation d'volution
W'(t) = x
1
(t)x''
2
(t) + x'
1
(t)x'
2
(t) x'
2
(t)x'
1
(t) x
2
(t)x''
1
(t) = a(t)W(t)
Il s'agit d'une quation diffrentielle linaire d'ordre un. Le wronskien peut donc tre calcul
l'aide d'une primitive A de a
W(t) = W
0
exp(A(t))
o W
0
est une constante dpendant des conditions initiales.
Le wronskien s'interprte comme une aire dans le plan (y,y') appel espace des phases par les
physiciens. Le terme a dans l'quation diffrentielle E est qualifi de terme d'amortissement.
L'aire du triangle form par les valeurs de deux solutions reste constante au cours du temps si le
terme d'amortissement est nul, elle dcrot de faon exponentielle s'il est strictement positif.
Dfinition gnrale pour une quation vectorielle []
On suppose que E est un espace vectoriel de dimension finie n, I un intervalle de et y'=ay une
quation diffrentielle linaire homogne sur E, avec a continue de I dans L(E). On note S
l'espace solution, qui est un espace vectoriel de dimension n par le thorme de Cauchy-
Lipschitz.
Soit y
1
,... y
n
un systme de n solutions de l'quation diffrentielle. On qualifie ce systme de
systme fondamental de solutions quand il constitue une base de S.
On appelle wronskien de ce systme le dterminant
39
Pour le calculer prcisment, il faut spcifier une base de rfrence.
Par l'isomorphisme de conditions initiales, le wronskien est nul en un point si et seulement si le
systme de solutions est li. En consquence, si le wronskien s'annule en un point, il s'annule en
tout point.
Thorme de Liouville []
L'quation d'volution du wronskien est
Le wronskien est donc connu une constante prs
Il apparat notamment que le wronskien est soit toujours nul, soit jamais nul, ce qui confirme les
observations du paragraphe prcdent.
Connaissant n-1 solutions indpendantes de l'quation, l'expression du wronskien peut tre
utilise pour en dterminer une de plus et rsoudre compltement l'quation.
quations scalaires d'ordre n []
On s'intresse l'quation
o les fonctions a
i
sont continues valeurs relles (ou complexes).
On sait que cette quation peut tre ramene une quation du type prcdent en prenant pour
vecteur inconnu
Le wronskien d'un systme de n solutions est alors dfini par
40
Son quation d'volution est
S-ar putea să vă placă și
- Odyssee 2de Livre Du Professeur Programme 2009Document196 paginiOdyssee 2de Livre Du Professeur Programme 2009theo_lepine94% (18)
- Fiche Pédagogique Algo Leçon 1Document4 paginiFiche Pédagogique Algo Leçon 1Maryem Baihat100% (3)
- Ellipses NSI Terminale 2edDocument210 paginiEllipses NSI Terminale 2edRhodia100% (2)
- M02 - Mathématiques Appliquées BTP-TSGTDocument90 paginiM02 - Mathématiques Appliquées BTP-TSGTHeavenSent100% (5)
- Analyse Numerique (French)Document139 paginiAnalyse Numerique (French)IzemAmazigh100% (2)
- Théorie Des Structures 2 (ENIT)Document65 paginiThéorie Des Structures 2 (ENIT)MezniÎncă nu există evaluări
- Plan de Cours Nyc PDFDocument5 paginiPlan de Cours Nyc PDFMohamedLabiodÎncă nu există evaluări
- UAO Syllabus 2020 - ALGEBREDocument4 paginiUAO Syllabus 2020 - ALGEBREKatcha nanklan enock hiliÎncă nu există evaluări
- TD3 - Classes Héritage Polymorphisme Interface PaquetageDocument1 paginăTD3 - Classes Héritage Polymorphisme Interface PaquetageMina Mint ChighaliÎncă nu există evaluări
- DP Comps Subject-Brief May 2022 FDocument4 paginiDP Comps Subject-Brief May 2022 FredamoulakÎncă nu există evaluări
- Syllabus Algebre LineaireDocument6 paginiSyllabus Algebre Lineairefaresfares84Încă nu există evaluări
- probaDocument1 paginăprobandhbhqf7b5Încă nu există evaluări
- Abdelaziz Nabil UADA FST HERDocument23 paginiAbdelaziz Nabil UADA FST HERHåmēd Bën MåkhtārįÎncă nu există evaluări
- Abdelaziz Nabil UADA FST HERDocument23 paginiAbdelaziz Nabil UADA FST HERHåmēd Bën MåkhtārįÎncă nu există evaluări
- Cours 2023 Linfo1121Document3 paginiCours 2023 Linfo1121Eddy SHANGAÎncă nu există evaluări
- Equation DifferentielleDocument144 paginiEquation Differentielletmira2012Încă nu există evaluări
- Syllabus - Algorithmique AvancéeDocument3 paginiSyllabus - Algorithmique AvancéeSessÎncă nu există evaluări
- 1syllabus - ALGEBRE 1 - 4SDocument4 pagini1syllabus - ALGEBRE 1 - 4SmelvinphyllisakouÎncă nu există evaluări
- Plan de CoursDocument10 paginiPlan de Coursduper100% (1)
- Cours 2017 LFSAB1104Document3 paginiCours 2017 LFSAB1104elsa18Încă nu există evaluări
- Fiche Technique GE-GMDocument9 paginiFiche Technique GE-GMAnas YassineÎncă nu există evaluări
- Contrôle Continu 3ème Et 4ème GM - GE 2021-2022Document4 paginiContrôle Continu 3ème Et 4ème GM - GE 2021-2022Kadri MongiÎncă nu există evaluări
- Mat 1903Document3 paginiMat 1903AbdelmalkÎncă nu există evaluări
- Slides 1Document33 paginiSlides 1NYB ConsultingÎncă nu există evaluări
- Calc 1Document2 paginiCalc 1BrunoCarlinÎncă nu există evaluări
- Info Gral Algebra VFDocument14 paginiInfo Gral Algebra VFNoriega CelsoÎncă nu există evaluări
- CEASE S1 Recherche OperationnelleDocument21 paginiCEASE S1 Recherche Operationnelleprinciliabola07Încă nu există evaluări
- BGF Recherche OperationnelleDocument27 paginiBGF Recherche Operationnelletgnf54drjqÎncă nu există evaluări
- Syllabus Logique Et Algorithme 2021Document19 paginiSyllabus Logique Et Algorithme 2021Haingonirina Ignace RajaosolomanantenaÎncă nu există evaluări
- Mathseries GDocument23 paginiMathseries GSamba DiengÎncă nu există evaluări
- Aides Pédagogiques: D'InformatiqueDocument10 paginiAides Pédagogiques: D'InformatiqueMonia GhazouaniÎncă nu există evaluări
- InfoCommune MP PC PSI PT 1&2Document10 paginiInfoCommune MP PC PSI PT 1&2Essayh WadieÎncă nu există evaluări
- Sciences 2021Document36 paginiSciences 2021Bile DjetouanÎncă nu există evaluări
- Sujet 1(2) MergedDocument78 paginiSujet 1(2) Mergedndhbhqf7b5Încă nu există evaluări
- Cours 2023 Lepl1104Document3 paginiCours 2023 Lepl1104Ousmane SawadogoÎncă nu există evaluări
- Math56 Integration 06 2022-3Document72 paginiMath56 Integration 06 2022-3naghdalyanÎncă nu există evaluări
- Cours Mathematiques Pour Economistes 2022 2023 28 09 2022Document328 paginiCours Mathematiques Pour Economistes 2022 2023 28 09 2022Christmas OTTIÎncă nu există evaluări
- 9 - ELE140-Conception Des Systèmes NumériquesDocument5 pagini9 - ELE140-Conception Des Systèmes NumériquesAbdelwahed El Alami100% (1)
- Géométrie Collège-LycéeDocument1 paginăGéométrie Collège-Lycéendhbhqf7b5Încă nu există evaluări
- UtilisationDunod1920 (A) (020919)Document23 paginiUtilisationDunod1920 (A) (020919)DominiqueÎncă nu există evaluări
- 4 SI Algoritmique PDFDocument248 pagini4 SI Algoritmique PDFnawel yahiaÎncă nu există evaluări
- SyllabusDocument5 paginiSyllabusroroÎncă nu există evaluări
- Ep2 2023Document14 paginiEp2 2023Alex RispailÎncă nu există evaluări
- Remarques Et Recommandations Du Jury A Lissue Des Epreuves de Mathematiques en ISE Option Mathematiques Et Economie de 2023Document6 paginiRemarques Et Recommandations Du Jury A Lissue Des Epreuves de Mathematiques en ISE Option Mathematiques Et Economie de 2023Mohamed Sanogo (itachi)Încă nu există evaluări
- Cours Systemes LogiquesDocument63 paginiCours Systemes Logiquesfarouk.zouariÎncă nu există evaluări
- Mathématiques Et Méthodes Numériques-V3-1Document147 paginiMathématiques Et Méthodes Numériques-V3-1Rachid Mounir100% (1)
- Cours de Méthode Numérique 2016 BAC II ESI-1Document87 paginiCours de Méthode Numérique 2016 BAC II ESI-1yannickÎncă nu există evaluări
- m21 Mathematiques Et Mecanique AppliqueeDocument64 paginim21 Mathematiques Et Mecanique AppliqueeSteve Gate100% (1)
- Programme - Formation - Expert de Conception Mecanique CATIA V5 - CATIA V5 Mechanical Design ExpertDocument2 paginiProgramme - Formation - Expert de Conception Mecanique CATIA V5 - CATIA V5 Mechanical Design ExpertOris Joan KaboreÎncă nu există evaluări
- Griesp - Resolution Probleme Cpge PDFDocument247 paginiGriesp - Resolution Probleme Cpge PDFYacine AbaamraneÎncă nu există evaluări
- De La Résolution de Problèmes À La Construction D'automatismesDocument31 paginiDe La Résolution de Problèmes À La Construction D'automatismesValentin HOUXÎncă nu există evaluări
- Canevas GLDocument34 paginiCanevas GLPatrick sianiÎncă nu există evaluări
- Modalit S Cours de M Ca BAC1 2009Document3 paginiModalit S Cours de M Ca BAC1 2009kdalÎncă nu există evaluări
- MatlabDocument3 paginiMatlabnakali12Încă nu există evaluări
- Mat2190 Option1Document5 paginiMat2190 Option1Norbert PiechowiakÎncă nu există evaluări
- Programme Detaille GI SupmecaDocument171 paginiProgramme Detaille GI Supmecahoudaelias62Încă nu există evaluări
- Programmation PlanDocument10 paginiProgrammation PlanVazgen MarkaryanÎncă nu există evaluări
- MAT165 20152 PlanDocument6 paginiMAT165 20152 PlanFrancis CÎncă nu există evaluări
- GINF 1A S1 2021-2022 Projet Intégré Fiche de CadrageDocument2 paginiGINF 1A S1 2021-2022 Projet Intégré Fiche de CadrageLamiaa CherkaÎncă nu există evaluări
- Modélisation Et SimulationDocument4 paginiModélisation Et SimulationMourad El BioudÎncă nu există evaluări
- Prog SecDocument34 paginiProg SecIdrissa KouyatéÎncă nu există evaluări
- Construire des grilles d'évaluation descriptives au collégial: Guide d'élaboration et exemples de grilleDe la EverandConstruire des grilles d'évaluation descriptives au collégial: Guide d'élaboration et exemples de grilleÎncă nu există evaluări
- F BC2 01 MatricesDocument19 paginiF BC2 01 MatricessisukatorraÎncă nu există evaluări
- Liste-Des-Ressources - Copie PDFDocument10 paginiListe-Des-Ressources - Copie PDFLolo RéelÎncă nu există evaluări
- Dynamique Des Ensembles de JuliaDocument12 paginiDynamique Des Ensembles de JuliaAymeric BouzyÎncă nu există evaluări
- Develeppement LimitéDocument17 paginiDeveleppement LimitéLOLIPOOPÎncă nu există evaluări
- Cours 1 - MTH1008Document33 paginiCours 1 - MTH1008nesrinbna11Încă nu există evaluări
- 02.planchet - Jacquemin.simulation 1Document33 pagini02.planchet - Jacquemin.simulation 1Eric LegerÎncă nu există evaluări
- Rapport Du ProjetDocument4 paginiRapport Du Projethajar benayadÎncă nu există evaluări
- Fonction Racine Carree Cours PDFDocument4 paginiFonction Racine Carree Cours PDFherve joelÎncă nu există evaluări
- Theorie Des Groupes Solutions Des ExercicesDocument77 paginiTheorie Des Groupes Solutions Des ExercicessaidbanachÎncă nu există evaluări
- Objectifs Du ModuleDocument21 paginiObjectifs Du ModuleHans HermanÎncă nu există evaluări
- Chap 3 DualitéDocument7 paginiChap 3 DualitéYoussef DriraÎncă nu există evaluări
- Ebook LeakDocument4 paginiEbook LeakPARLEX. CDÎncă nu există evaluări
- Epreuve Zero Maths Probatoire C e 2022Document2 paginiEpreuve Zero Maths Probatoire C e 2022Ngouen AnouarÎncă nu există evaluări
- Examens Corriges Integrales MultiplesDocument5 paginiExamens Corriges Integrales MultiplesPhil ČhrýstaĺÎncă nu există evaluări
- 20 DeterminantsDocument2 pagini20 DeterminantsChafi DrissÎncă nu există evaluări
- Cours Maths L2 - S3 2022Document43 paginiCours Maths L2 - S3 2022Thianfanga Oumar Sanogo ThianoÎncă nu există evaluări
- Fin Poly EDPDocument51 paginiFin Poly EDPLet us DanceÎncă nu există evaluări
- Chap 04 Exercices Opt GrapheDocument31 paginiChap 04 Exercices Opt GrapheSamah Sam BouimaÎncă nu există evaluări
- 2019 Thèse BHN CorDocument169 pagini2019 Thèse BHN Corato ndongo fabriceÎncă nu există evaluări
- O1 Optimisation Points CritiquesDocument2 paginiO1 Optimisation Points Critiqueszakariae ben-akkaÎncă nu există evaluări
- Relation D'équivalence, Relation D'ordreDocument3 paginiRelation D'équivalence, Relation D'ordreOmar AmroucheÎncă nu există evaluări
- MathAppli À La BiologieDocument51 paginiMathAppli À La BiologiemodoulayeÎncă nu există evaluări
- LM125 2011 1Document4 paginiLM125 2011 1Lahoucine OuakkasÎncă nu există evaluări
- Partie - 2 (Mode de Compatibilité)Document11 paginiPartie - 2 (Mode de Compatibilité)EL BOUHADDIOUIÎncă nu există evaluări
- Calculs Algébriques - TD 1Document4 paginiCalculs Algébriques - TD 1Rehab EzzaheryÎncă nu există evaluări
- Chapitre 5 - Méthodes de Recherche LocaleDocument5 paginiChapitre 5 - Méthodes de Recherche LocaleSlimani AhmedÎncă nu există evaluări
- UE Géomécanique 1 - 06 - ContraintesDocument29 paginiUE Géomécanique 1 - 06 - Contraintessalim.choukchoubrahamÎncă nu există evaluări
- Espace Vectoriel EuclidienDocument16 paginiEspace Vectoriel Euclidiensamuel BiléÎncă nu există evaluări